汽车发动机悬置系统与悬架系统集成控制研究
2022-08-19潘道远高清振李宽路
潘道远,高清振,2,李宽路,李 伟
(1.安徽工程大学机械工程学院,安徽 芜湖 241000;2.汽车新技术安徽省工程技术研究中心,安徽 芜湖 241000)
1 前言
人们对车辆的整体品质追求日益提升,现代车辆正朝着安全、舒适、节能、环保、智能化的方向发展[1-3]。为了提高整车的综合性能,考虑各个子系统之间的相互影响,进行集成控制已成为现代车辆控制研究的热点[4]。文献[5]为提高纯电动汽车底盘的综合性能,提出了一种实现纯电动汽车复合制动与主动悬架协同控制方法。针对车辆极限工况下的稳定性问题,文献[6]设计了一种四轮转向和主动悬架的集成控制算法。
车辆悬置系统与悬架系统作为振动系统的两个重要子系统,其振动的传递特性对操纵稳定性和乘坐舒适性有很大影响[7-9]。20世纪80年代开始研发的主动悬置能够较好地满足发动机理想的隔振特性,在低频和高频都具有良好的隔振效果。文献[10]应用最优控制理论设计了主动悬置系统LQR控制器,并利用三种方法确定了控制器的加权系数。悬架系统是汽车的重要部件,其性能是影响车辆操稳性和舒适性的重要因素[11-13]。文献[14]针对主动悬架系统的质量参数不确定性,提出了一种基于T-S模糊模型的主动悬架滑模容错控制器设计方法。文献[15]提出了具有扰动观测器的滑模控制方法。针对电磁主动悬架直线式作动器电磁力波动对悬架系统影响问题,文献[16]基于多目标粒子群算法对作动器结构参数进行优化。为实现更好的整体优化效果,文献[17]对主动悬架的结构参数和控制器参数同时进行优化。
综上所述,大部分研究集中于单个系统控制方法的研究,且控制效果较好,而对车辆悬置系统与悬架系统的集成控制研究相对较少。因此,这里以建立集成系统数学模型为研究切入点,应用最优控制理论设计集成控制系统,并采用粒子群算法优化加权系数以提高集成控制系统的控制品质。
2 集成系统数学模型的建立
采用复杂的多自由度整车模型设计出的控制器较为复杂,故这里对于车辆主动悬置系统与主动悬架系统的集成研究采用1∕4车辆简化模型,如图1所示。图1中:m1—轮胎质量;m2—车身质量;m3—动力总成质量;k1—轮胎刚度;k2—悬架刚度;k3—悬置刚度;c2—悬架阻尼;c3—悬置阻尼;xq—悬架系统的路面输入;x1—轮胎位移;x2—车身位移;x3—动力总成位移;fe—发动机自身产生的激振力;f1—主动悬架控制力;f2—主动悬置可控力。
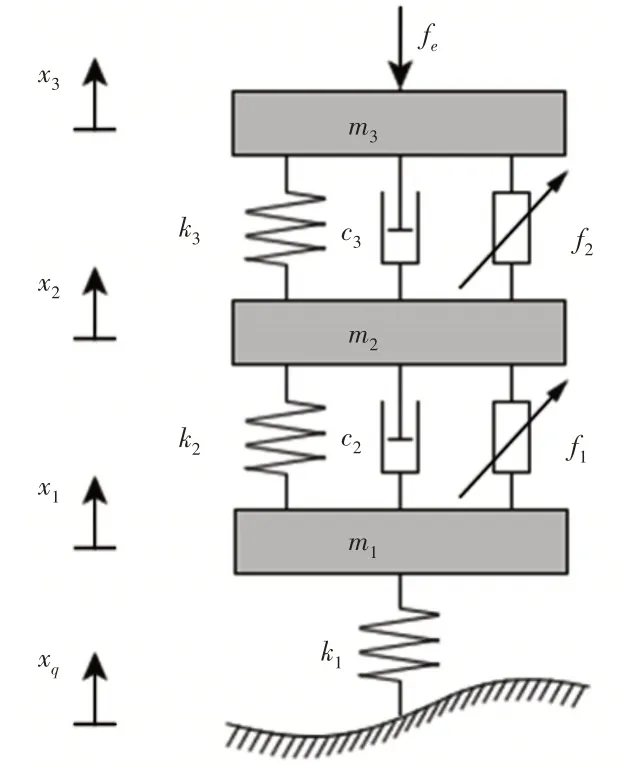
图1 车辆悬置系统与悬架系统集成模型Fig.1 Integrated Model of Vehicle Mount System and Suspension System
对图1中的集成模型进行动力学分析,可得到系统的微分方程为:
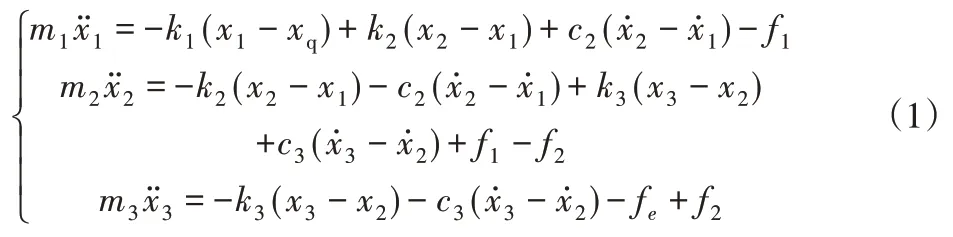
取状态变量为:
输出变量为:

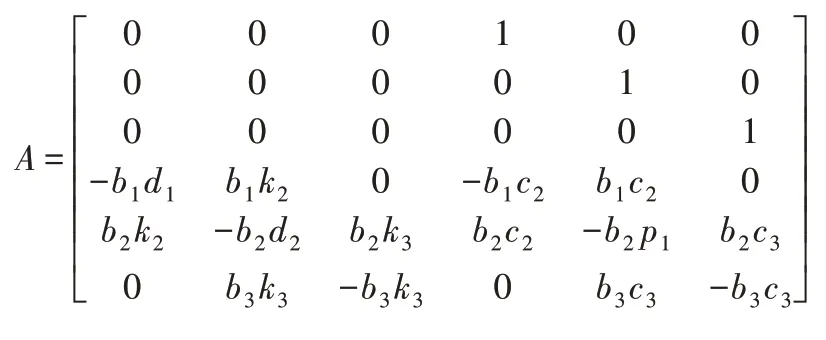
则系统的状态方程为:

其中:
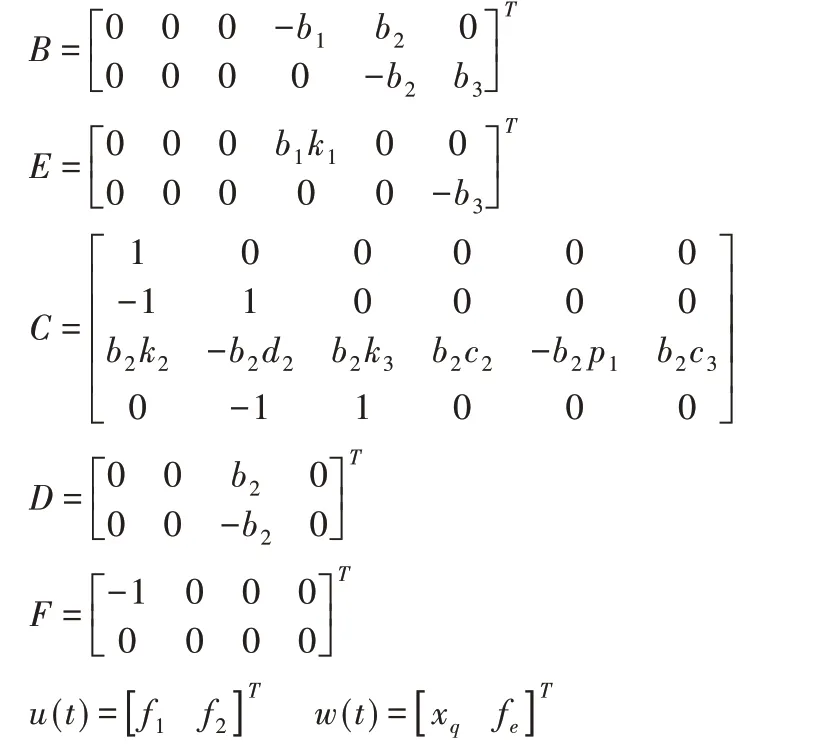
为了便于分析问题,路面激励的时域模型采用滤波白噪声模型[17]:

式中:f0—下截止频率;n0—参考空间频率;Gq(n0)—路面不平度系数;u—车辆行驶速度;w(t)—单位白噪声信号。
在分析悬置系统的动态特性时,发动机激励模型的建立是一个重要部分。直列四缸发动机的振动由二阶往复惯性力产生[10],其激励模型为:

式中:φ—发动机安装角;mp—单缸活塞质量;r—曲柄半径;λ—曲柄半径与连杆长度比;ω—曲柄角速度,ω= 2πn∕60,其中,n—发动机转速。
3 集成系统控制模型
3.1 最优控制器设计
在集成控制系统的设计中,必须综合考虑轮胎动位移、悬架动挠度、车身加速度及悬置动挠度。还要考虑主动悬架和主动悬置所耗能量尽可能小。因此,目标函数取为:

式中:l1~4—轮胎动位移、悬架动挠度、车身加速度和悬置动挠度的加权系数;l5和l6—主动悬架控制力和主动悬置控制力的加权系数。
根据LQR控制理论[10],将式(7)改写成二次函数积分型。

其中:
根据状态变量x(t),可得出t时刻主动悬架和主动悬置输出的最优控制力为:

其中,最优控制反馈增益矩阵K = BTP + NT,P矩阵满足黎卡提(Riccatti)代数方程:

由上述LQR 控制主动悬置与主动悬架的集成模型可以看出,加权系数l1~4将对LQR控制车辆悬置系统与悬架系统的综合性能产生重要影响,因此合理地选择λ1~6是设计集成控制系统的关键之一。
3.2 粒子群优化算法
LQR控制器的加权系数确定需设计者依靠经验反复调试,存在主观因素,且系统难以得到期望的控制效果等问题。针对此问题,考虑利用粒子群算法优化加权系数以提高集成控制系统的控制品质。粒子群(Particle Swarm Optimization,PSO)算法是一种进化计算技术[4]。PSO算法首先进行初始化处理,然后在解空间中随机生成粒子群。所有粒子由优化模型的目标函数来计算其适应值。粒子群在解空间中追踪当前的最优粒子进行搜索,通过迭代找到最优解。假设在d维目标空间中搜索,生成的种群大小为N,第i个粒子的速度为vi =(vi,1vi,2…vi,d)、位置为xi=(xi,1xi,2…xi,d),其中,1 ≦i≦N。PSO算法将通过如下的公式更新粒子的速度和位置。

式中:j= 1,2,…,d;pi,j—第i个粒子自身所搜索到的最优解,其适应值为pbest;pg,j—粒子群当前搜索到的最优解,其适应值为gbest;wct—惯性权重;c1和c2—学习因子;r1和r2—(0~1)之间随机数。
惯性权重对PSO算法的搜索能力有至关重要的影响。为平衡全局和局部搜索能力,惯性权重根据粒子适应值进行自适应调节。

式中:wmin—惯性权重的最小值;wmax—惯性权重的最大值;fct—粒子当前的适应值;favg和fmin—所有粒子当前适应值的平均值和最小值。
3.3 集成控制模型
考虑到集成控制系统的性能指标轮胎动位移、悬架动挠度、车身加速度和悬置动挠度的单位和数量级的差异,将目标函数式(7)进行变换,采用集成控制系统相应指标的均方根值除以被动系统相应指标的均方根值作为粒子群算法的适应度函数,即:

式中:λ =[λ1λ2λ3λ4λ5λ6]T,tdd(λ)、sdd(λ)、vba(λ)和mdd(λ)—轮胎动位移、悬架动挠度、车身加速度和悬置动挠度的均方根值;tddpas、sddpas、vbapas和mddpas—被动系统相应指标的均方根值。
考虑到集成控制系统的性能优于被动系统的性能,选取的约束条件为:

根据集成控制系统的目标函数和约束条件,采用Matlab 的PSO 工具箱对加权系数λ1~6进行优化。针对工具箱的核心函数pso_Trelea_vectorized 难于处理约束条件的问题,利用罚函数法将约束优化问题转化为无约束优化问题[16]。同时,在优化λ1~6过程容易出现矩阵[Q N;NT R]非正定,从而导致调用lqr函数出错,算法设计时进行了约束处理。改进PSO算法具体步骤如下:(1)初始化参数,随机生成种群中各粒子的速度和位置。(2)将种群中各粒子的位置依次赋给LQR控制器的加权系数λ1~6。矩阵[Q N;NT R]非正定,令适应值fct=1000,退出(2)。计算最优控制反馈增益矩阵K和最优控制力U,并作用于集成控制系统。不满足式(15)中任一约束条件时,令适应值fct=fct+1000,退出(2)。根据式(14)计算适应度函数,令适应值fct= f(λ)。(3)对种群中各粒子,将其适应值fct与其经历过的最好位置pbest作比较,如果小于,则将其作为当前的最好位置pbest。比较当前所有pbest和gbest的值,如果小于,更新gbest。(4)判断是否满足PSO的终止条件。如果满足,退出算法;否则,根据式(11)和式(12)更新粒子的速度和位置,根据式(13)更新权重,k=k+1,执行(2)。
根据上述改进PSO 算法步骤,编写Matlab 优化程序。改进PSO 算法参数设定:粒子大小6,种群大小24,最大迭代次数2000,学习因子c1=c2=2,λ1~4的搜索范围为[1,108],λ5和λ6的搜索范围为[10-8,1],粒子最大速度为搜索范围的10%。改进PSO算法优化过程中适应值迭代曲线,如图2所示。由图2可知,算法在前5次迭代中,矩阵[Q N;NT R]为非正定矩阵,适应值为1000。从第6次迭代开始到最大迭代次数2000为止,种群中粒子满足约束条件,适应值由3.949减少到2.845,降低了27.96%。优化得到的加权系数λ1~6分别为7.61×106、3.24×106、6.25、108、0.003和6.73×10-4。
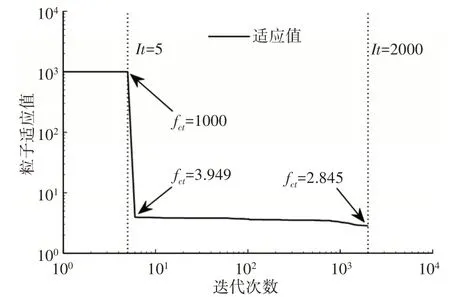
图2 粒子适应值变化曲线Fig.2 The Changing Curve of Fitness Value of Particles
4 仿真计算及结果分析
为验证车辆悬置系统与悬架系统集成控制采用基于粒子群算法优化的LQR控制策略的效果,与被动系统性能指标进行对比分析。选取集成控制模型仿真参数为:m1=25kg,m2=330kg,m3=56kg,k1=200000N∕m,k2=17000N∕m,k3=156000N∕m,c2=1900N·s∕m,c3= 1230 N·s∕m。首先在Matlab环境下进行频域分析,得到性能指标对路面激励的幅频响应特性曲线,如图4所示。路面激励频率的主要范围为[0 10Hz],见图4中阴影区域。由图4可知,在小于8.85Hz部分,基于粒子群算法优化的LQR控制(图中为PSOLQR)与被动系统(图中为Passive)相比,降低了轮胎动位移和车身加速度。PSOLQR 在大于2.67Hz 部分的悬架动挠度好于Passive,而在大于0.84Hz部分的悬置动挠度性能明显好于Passive。综上所述,车辆在路面频率区域内采用基于粒子群算法优化的LQR控制的性能指标均有一定的改善。
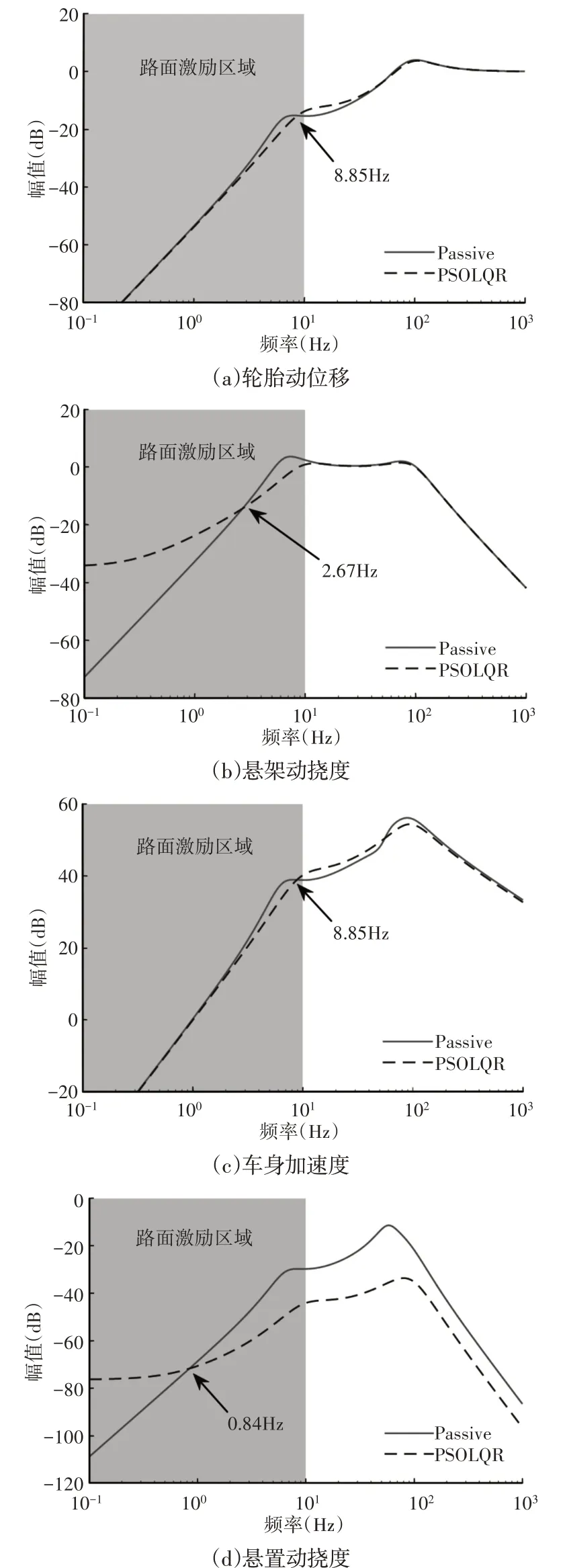
图3 路面激励下频域仿真Fig.3 Frequency Domain Simulation under Road Excitation
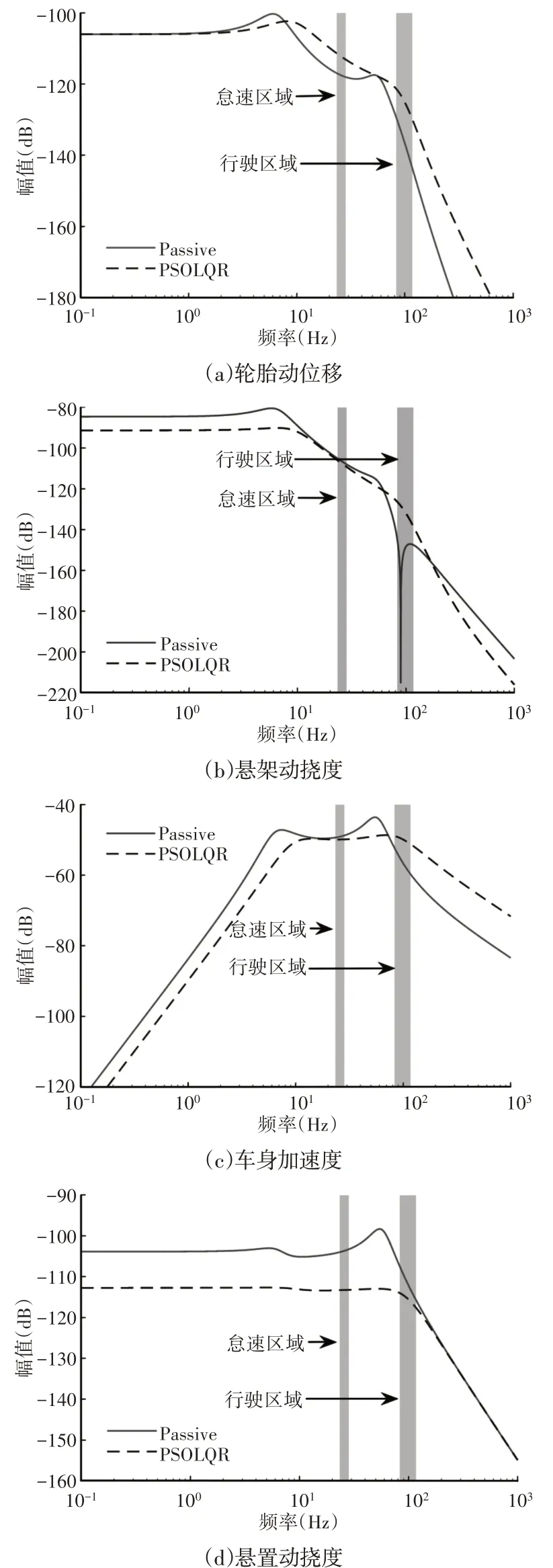
图4 发动机激励下频域仿真Fig.4 Frequency Domain Simulation under Engine Excitation
性能指标在发动机激励下的频域仿真,如图5所示。图5中,发动机处于怠速区域时的转速在700r∕min 到850r∕min 内波动,而处于行驶区域时的转速维持在2500r∕min到3500r∕min。由图5可知,PSOLQR在怠速区域与Passive相比,降低了悬架动挠度和车身加速度,显著改善了悬置动挠度,这有利于发动机运行的稳定性,但轮胎动位移有所恶化。车辆此时处于静止状态,因此发动机激励对轮胎动位移的影响有限。PSOLQR 在行驶区域与Passive 相比,仅悬置动挠度有所改善。车辆此时受到路面激励和发动机激励的联合作用,相关性能指标受到双重影响,因此需要从时域上进行详细探讨。
为进一步阐明车辆性能指标在路面激励和发动机激励联合作用下的影响,在Matlab∕Simulink中搭建车辆悬置系统与悬架系统集成控制仿真模型进行时域分析,如图5所示。图5中,路面激励根据车速和路面等级给出,而发动机激励由发动机转速决定。车辆行驶时在路面激励和发动机激励联合作用下产生振动,从而影响其乘坐舒适性和操纵稳定性。集成控制系统首先通过车载传感器实时采集车辆运行状态信息,然后经ECU采用LQR控制算法计算所需控制力大小,最后由主动悬置和主动悬架输出相应控制力,从而抑制车辆的振动,使NVH综合性能达到最优。假设车辆在B级路面上行驶,路面不平度系数G0= 64×10-6m2∕m-1,车速u=20m∕s,发动机转速n=2500r∕min。车辆在路面激励和发动机激励联合作用下主动悬架控制力和主动悬置控制力,如图6、图7所示。由图6和图7可知,主动悬架和主动悬置输出的最大控制力分别为708N和585N。主动悬置控制力幅值变化频率远大于主动悬架控制力,这说明在产品设计时要求主动悬置的响应速度更快。
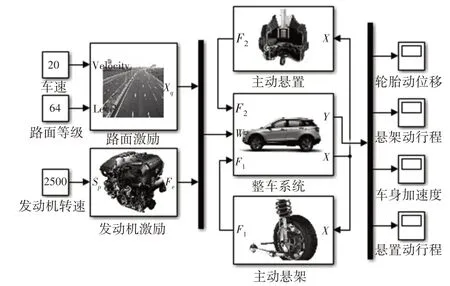
图5 集成控制仿真模型Fig.5 The Simulation Model of Integrated Control System
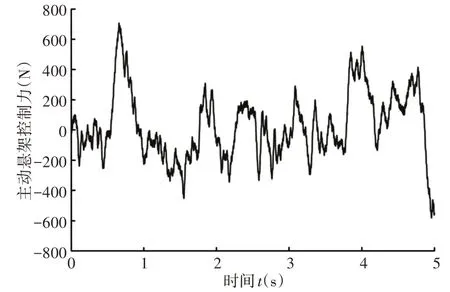
图6 主动悬架控制力Fig.6 The Control Force of Active Suspension
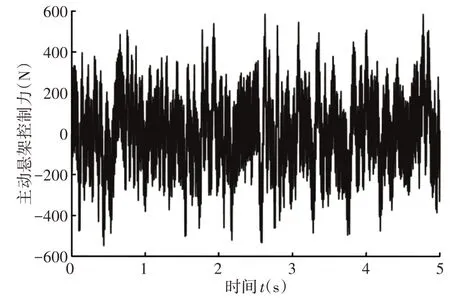
图7 主动悬置控制力Fig.7 The Control Force of Active Mount
车辆在路面激励和发动机激励联合作用下的动态特性,如图8所示。
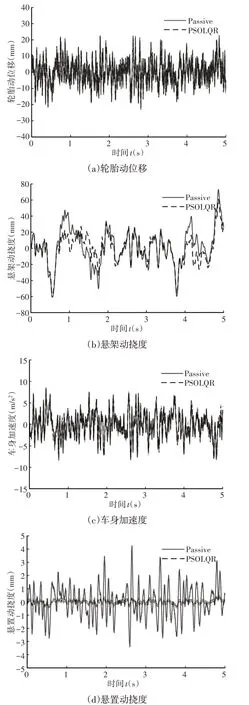
图8 路面与发动机联合激励下时域仿真Fig.8 Time Domain Simulation under the Joint Excitation of Road and Engine
由图8可知,轮胎动位移的峰值和均方根值分别由22.8mm减小到22.6mm和7.4mm减小到7.3mm,降低了0.88% 和1.35%。悬架动挠度的峰值和均方根值分别由73.1mm减小到61.2mm和23mm减小到18.6mm,降低了16.28%和19.13%。车身加速度的峰值和均方根值分别由8.51m∕s2减小到8.28m∕s2和2.86m∕s2减小到2.79m∕s2,降低了2.7%和2.45%。悬置动挠度的峰值和均方根值分别由4.3mm 减小到0.5mm 和1.2mm 减小到0.2mm,降低了88.37% 和83.33%。上述数据说明基于粒子群算法的LQR 控制策略在改善悬架动挠度和悬置动挠度方面效果明显,有利于提高车辆的操纵稳定性,但在改善乘坐舒适性不足。由目标函数式(7)可知,车辆性能指标之间是存在矛盾的。为进一步协调车辆的操纵稳定性和乘坐舒适性,将在后续研究中探索根据车辆行驶工况和发动机运行状态进行混杂控制。
5 结论
建立了车辆悬置系统与悬架系统的集成模型,基于最优控制理论设计了集成控制系统。针对最优控制器加权系数难以确定的问题,采用粒子群算法优化加权系数以提高集成控制系统的控制品质。为验证集成控制系统采用基于粒子群算法优化的LQR控制策略的效果,在Matlab环境下进行了频域分析,分析表明车辆在路面频率区域内采用基于粒子群算法优化的LQR控制的性能指标均有一定的改善。为进一步阐明车辆性能指标在路面激励和发动机激励联合作用下的影响,在Matlab∕Simulink中搭建集成控制仿真模型进行了时域分析,分析表明基于粒子群算法的LQR控制策略在改善悬架动挠度和悬置动挠度方面效果明显,有利于提高车辆的操纵稳定性,但在改善乘坐舒适性不足。为进一步协调车辆的操纵稳定性和乘坐舒适性,将在后续研究中探索根据车辆行驶工况和发动机运行状态进行混杂控制。
