三支模糊集及其应用(I)
2022-08-10张小红胡青青王敬前李小南
张小红,胡青青,王敬前,李小南
(1.陕西科技大学 数学与数据科学学院,陕西 西安 710021;2.陕西科技大学 电气与控制工程学院,陕西 西安 710021;3.西安电子科技大学 数学与统计学院,陕西 西安 710071)
不确定性普遍存在, 也是许多学科关注的焦点。 概率论、 模糊集理论、 粗糙集理论等均是研究不确定性的数学理论[1-3], 而Heisenberg(海森堡)于1927年提出的不确定性原理(uncertainty principle)描绘了微观世界的不确定性, 是量子力学的基础[4-5]。 同时, 不确定性也是人工智能关注的核心问题之一[6]。 张钹院士指出[7]: “要大力发展数据驱动和知识驱动融合的第三代人工智能”; 徐宗本院士最近也指出[8]: “新一代AI 必须深入研究知识推理与数据学习的融合问题”, 而研究人类的知识表示必然要面对人类知识的不确定性。
模糊集的核心是程度化思想, 它用隶属函数表达对象隶属于模糊概念的程度; 而粗糙集基于知识粒的思想, 借助上、 下近似算子利用已有的“基本知识”(知识粒)来表达不确定性概念。 加拿大著名学者Y. Y. Yao教授在深入研究粗糙集(特别是决策粗糙集)的基础上, 逐步建立起一套崭新的理论, 称为三支决策(three-way decision)理论[9-11]。 最初, “三支”源自粗糙集理论中的正域、 负域和边界域的概念, 而现在三支决策理论中的“三支”具有更加广泛的含义。 三支决策是一种符合人类认知的决策模式, 它认为: 人们在实际决策过程中, 对于具有充分把握接受或拒绝的事物能够立即作出快速的判断; 对于那些不能立即作出决策的事物, 人们往往会推迟对事物的判断, 即延迟决策。 三支决策理论已得到广泛而深入的研究, 它不仅是一种决策方法, 更是三元思维的哲学, 是三分而治的思维范式, 是解决不确定性问题的新思路和新方法[12-15]。Y. Y. Yao还在文献[16]中用大量生动的几何元素和结构阐释了三支决策的丰富内涵及其对AI的方法论指导意义。
本文将多种广义模糊集(包括格值模糊集、直觉模糊集[17]、部分模糊集[18-19]、中智集[20-21]等)和三支决策的三分而治思想结合起来,首次提出三支模糊集的概念,系统研究其基本运算及性质,分析它与相关概念和理论的联系与区别,并着重讨论三支模糊集的典型应用(由于内容较多,将分I、II、III等多篇论文陆续发表)。
1 预备知识
首先回顾本文将用到的若干基本概念和术语。
设L是非空集合,≤是L上的二元关系,如果≤满足自反性、反对称性和传递性,则称(L, ≤)是偏序集。对于偏序集(L, ≤),如果∀a,b∈L,其上确界(记为a∨b)与下确界(a∧b)都存在,则称(L, ≤)是一个格。如果格(L, ≤)有最小元和最大元,则称(L, ≤)是有界格, 通常记为(L,∨,∧,0, 1),其中最小元、最大元分别记为0、 1。 任意子集都有上、 下确界的格称为完备格。 显然, 完备格必是有界格。 上、 下确界运算满足分配律的格称为分配格, 这里分配律指有限分配律(即对于有限个元素来说∨、 ∧的双向分配律成立)。
设L是有界分配格,h:L→L是L上的一元运算且满足:∀a,b∈L,h(h(a))=a,h(a∨b)=h(a)∧h(b),h(a∧b)=h(a)∨h(b),则称L为De Morgan代数。易知De Morgan代数中h是逆合映射(逆序对合对应)。
定义1[22]设(L, ∨, ∧, 0, 1)是有界格, 符号′是M上的一元运算,称(L,∨,∧,′, 0, 1)是广义De Morgan代数(或GM-代数),如果满足下列条件:∀x,y∈L,
GM1:x=(x′)′;
GM2: (x∧y)′=x′∨y′;
GM3: 1′=0。
广义De Morgan代数不必是分配格。
定义2设X,Y是非空集合, 若存在X的非空子集A, 有A到Y的映射f:A→Y, 则称f是X到Y的部分映射。 此时, 若x∈X-A, 称f在x处无定义。
注1在许多文献中都使用部分映射、部分函数、部分运算等术语[23-26],其含义有细微差别,为避免混淆,本文采用上述严格定义。
定义3[17, 27]设U为论域(经典集合), (L,∨,∧)是一个格,则映射A:U→L称为集合U上的格值模糊集。当L=[0, 1]时,格值模糊集A:U→L就是U上的Zadeh模糊集。当L=L*={(x,y)∈ [0, 1]2|x+y≤1}时,其上的序关系如下定义:∀(x1,y1),(x2,y2)∈L*,(x1,y1)≤(x2,y2)⟺x1≤x2且y1≥y2,格值模糊集A:U→L就是U上的直觉模糊集。
定义4[3]设U为论域、R是论域U上的等价关系,称(U,R)为近似空间。用U/R表示由等价关系R确定的U的划分。若X⊆U,分别称集合









定义7[11]设U为论域,X,Y,Z⊆U。三元组〈X,Y,Z〉称为论域U上的一个三划分,如果满足以下3个条件:
1)X∪Y∪Z=U;
2)X≠∅,Y≠∅,Z≠∅;
3)X∩Y=∅,X∩Z=∅,Y∩Z=∅。
2 三支模糊集及其基本运算
2.1 三支模糊集合的定义
定义8设U是非空集合(论域),L、M、N是格。三个部分映射
f:U→L,g:U→M,h:U→N
组成的整体〈f,g,h〉称为一个三支模糊集(简记为TFS)。通常用大写字母A、B、C等表示三支模糊集。一个三支模糊集A可表示为:
A={〈x,fA(x),gA(x),hA(x)〉 |x∈U,fA(x)∈L,gA(x)∈M,hA(x)∈N}。
为便于叙述,引入如下术语:
1)若L=M=N,则称〈f,g,h〉是格值三支模糊集(或L-三支模糊集,或常规三支模糊集)。
2)设〈f,g,h〉是三支模糊集,L=M=N=[0, 1],且∀x∈U,f(x),g(x),h(x)均有定义,则称〈f,g,h〉是普通三支模糊集。
3)设〈f,g,h〉是普通三支模糊集,若∀x∈U,f(x)+g(x)+h(x)≤1,则称〈f,g,h〉是依赖三支模糊集;若∀x∈U,f(x)+g(x)+h(x)≥1,则称〈f,g,h〉是扩张三支模糊集。对于依赖三支模糊集〈f,g,h〉,若∀x∈U,f(x),g(x),h(x) ∈{0, 1},f(x)+g(x)+h(x)=1,则称〈f,g,h〉是三支集。
4)设〈f,g,h〉是常规三支模糊集,若f=g=h,则称〈f,g,h〉是(退化)一支模糊集。注意,一支模糊集较Zadeh模糊集、格值模糊集广泛(允许在某些点处隶属度缺失)。
5)设〈f,g,h〉是常规三支模糊集,若g=h,则称〈f,g,h〉是(退化)二支模糊集。注意,二支模糊集较直觉模糊集广泛。
用TFS(U;L)表示U上L-三支模糊集构成的分明集合;用TFS1(U)表示U上普通三支模糊集构成的分明集合;用TFS2(U)表示U上依赖三支模糊集构成的分明集合。

例2设(U,R)为近似空间,其中R对应U中对象的某个属性(仍用R表示),U中一些对象的R属性值缺失。∀X⊆U,用X0表示X中R属性值缺失的元素构成的分明集合。则〈f,g,h〉是一个常规三支模糊集,其中∀x∈U,
例3设(U,R)为近似空间,A是论域U上的模糊集。杨海龙教授在文献[30]中给出的粗糙模糊集的模糊三支决策,实际上就是一种三支模糊集,即由A可诱导一个如下的三支模糊集〈f,g,h〉:∀x∈U,



容易验证,此时f(x)+g(x)+h(x)未必小于等于1,即这里的〈f,g,h〉未必是依赖三支模糊集。不过,如下定义的三支模糊集〈f1,g1,h1〉是依赖三支模糊集:∀x∈U,
容易验证,当A为分明集合时,上述三支模糊集〈f,g,h〉和〈f1,g1,h1〉均是三支集(三划分)。
例4设(U,R)为模糊近似空间(R是论域U上的自反模糊关系),A是论域U上的模糊集。如下定义的三支模糊集〈f,g,h〉是模糊三支集:∀x∈U,



注2这里的R要求是自反模糊关系,否则,这里的g(x)未必大于等于0。
例5设U为一幅彩色图像的像素点组成的集合,∀x∈U,f(x),g(x),h(x)分别表示像素点x对应的R、G、B分量,则〈f,g,h〉是格L=[0,255]上的三支模糊集。当图像有破损时,一些像素点的R、G、B分量无法确定,即在这些点处三支模糊集〈f,g,h〉无定义。
例6设U={u1,u2,u3,u4,u5}表示某网上书店销售的5本图书,其网上销售量基本相当。根据用户购买后的反馈,得到如下评价数据(见表1)。其中:好评率=好评数/反馈评价意见的用户数,差评率=该图书差评数/5本图书的总差评数,不确定度=(中庸评价数+未评价数)/用户总数。
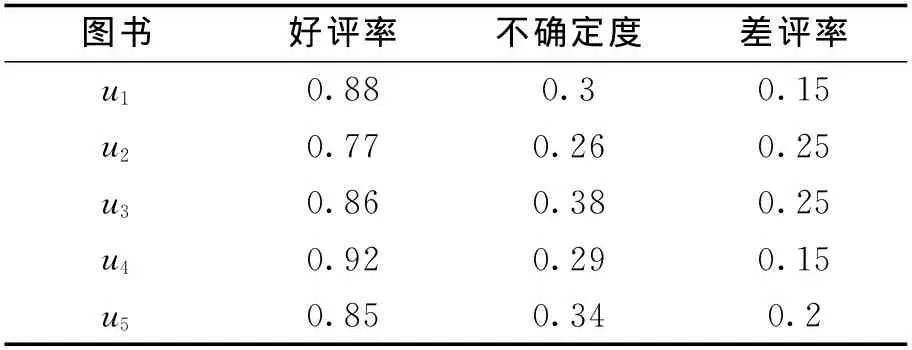
表1 用户评价数据Tab.1 User evaluation data
依据上述数据,可得到U上的三支模糊集{〈u1, 0.88, 0.3, 0.15〉,〈u2, 0.77, 0.26, 0.25〉,〈u3, 0.86, 0.38, 0.25〉,〈u4, 0.92, 0.29, 0.15〉,〈u5, 0.85, 0.34, 0.2〉}。
注3由于三个指标采用不同的评价“基准”,故该例中三个隶属函数互相独立,此例不是依赖三支模糊集。
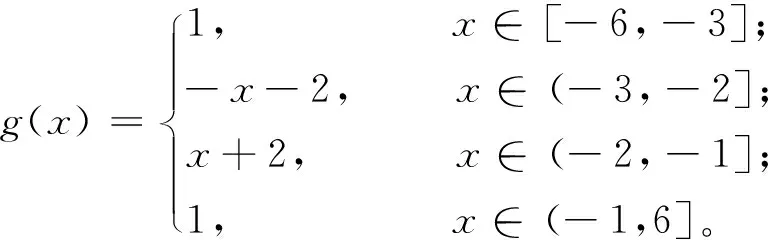
例7在工业过程控制中,经常要处理用模糊语言表达的数量值,比如“误差”在推理规则中常用负大、负中、负小、零、正小、正中、正大等词语表示,这些模糊词语可用三支模糊集量化表达。若误差变化范围为[-6, 6],即取U=[-6, 6],则“负小”可用下述三支模糊集表示:

2.2 三支模糊集的包含关系
为了表达方便,对三支模糊集中未定义的隶属度,后面将统一用符号“*”表示。设(L,∨,∧,0,1)是有界格,其上的序关系为≤。在L∪{*}上定义二元关系≤*如下:
∀x,y∈L,x≤*y当且仅当x≤y;
0≤**≤*1;(∀x∈L-{0, 1}) *||x。
其中“||”表示不可比。图1直观地表达了L∪{*}上的二元关系≤*。显然,L∪{*}关于≤*仍是有界格。
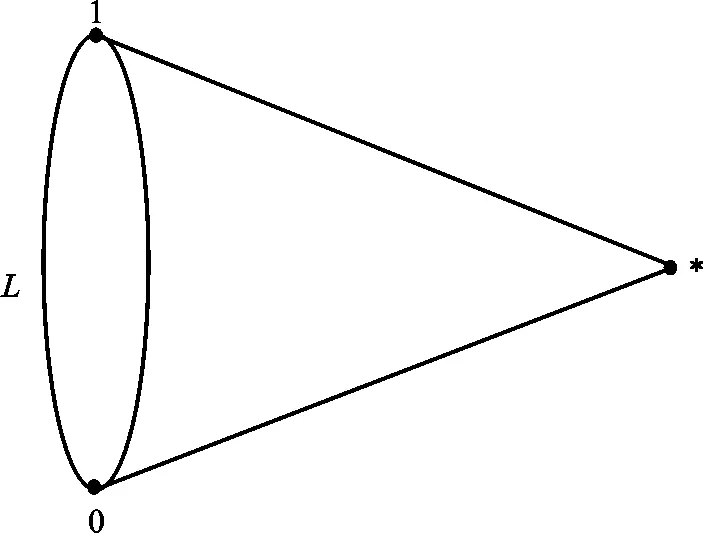
图1 格序关系的拓展Fig.1 Extension of the lattice order relation
设(L,∨,∧,0,1)是有界格,其上的序关系为≤。记集合
D(L)={(x1,x2,x3) |x1,x2,x3∈L};
D*(L)={(x1,x2,x3) |x1,x2,x3∈L∪{*}}。
如果x=(x1,x2,x3)∈D(L)或D*(L),则称x1,x2,x3分别为x的第一、二、三分量。
定义9设(L,∨,∧,0,1)是有界格,其上的序关系为≤。分别定义D*(L)上的二元关系≤l和≤r如下:∀x,y∈D*(L),
x≤ly⟺(x1≤*y1,x2≤*y2,x3≥*y3);
x≤ry⟺(x1≤*y1,x2≥*y2,x3≥*y3)。
定理1设(L,∨,∧,0,1)是有界格,则 (D*(L),≤l)及(D*(L),≤r)均是偏序集,且(D*(L),∨l,∧l, 0l, 1l)及(D*(L),∨r,∧r, 0r, 1r) 均是有界格,其中:∀x,y∈D*(L),
x∨ly=(x1∨y1,x2∨y2,x3∧y3);
x∧ly=(x1∧y1,x2∧y2,x3∨y3);
0l=(0, 0, 1);1l=(1, 1, 0);
x∨ry=(x1∨y1,x2∧y2,x3∧y3);
x∧ry=(x1∧y1,x2∨y2,x3∨y3);
0r=(0, 1, 1);1r=(1, 0, 0)。
注4因论文篇幅所限,本文略去所有结论的证明。
定义10设(L,∨,∧,0,1)是有界格,其上的序关系为≤。定义D*(L)上的二元关系≤t如下:∀x,y∈D*(L),
x≤ty⟺ (x1<*y1,x3≥*y3)或 (x1=y1,x3>*y3)或(x1=y1,x3=y3,x2≤*y2)。
定理2设(L,∨,∧,0,1)是有界格,则 (D*(L),≤t)是有界偏序集,其中0t=(0, 0, 1),1t=(1, 1, 0)分别是最小元和最大元。进而,(D*(L),∨t,∧t, 0t, 1t)是有界格,其中:∀x,y∈D*(L),
可以依据定义9、10给出三支模糊集的3种包含关系,下面以第3种为例给出论述。
定义11设U为论域,(L,∨,∧,0,1)是有界格,TFS(U;L)是U上L-三支模糊集构成的分明集合,A,B∈TFS(U;L)。 称A包含于B, 记为A⊆tB,如果∀x∈U,
(fA(x),gA(x),hA(x))≤t(fB(x),gB(x),hB(x))。
定理3设U为论域,(L,∨,∧,0,1)是有界格,TFS(U;L)是U上L-三支模糊集构成的分明集合。则∀A,B,C∈TFS(U;L),
1)A⊆tA;
2)A⊆tB,B⊆tA⟹A=B;
3)A⊆tB,B⊆tC⟹A=C。
2.3 三支模糊集的并、交、补运算
定义12设U为论域,(L,∨,∧,0,1)是有界格,TFS(U;L)是U上L-三支模糊集构成的分明集合。∀A,B∈TFS(U;L),定义其并、交运算如下:∀x∈U,
1) 若(fA(x),gA(x),hA(x))≤t(fB(x),gB(x),hB(x)),则
(A∪tB)(x)=(fB(x),gB(x),hB(x));
(A∩tB)(x)=(fA(x),gA(x),hA(x))。
2) 若(fA(x),gA(x),hA(x))与(fB(x),gB(x),hB(x))在序关系≤t下不可比,则
(A∪tB)(x)=(fA(x)∨fB(x), 0,hA(x)∧hB(x));
(A∩tB)(x)=(fA(x)∧fB(x), 1,hA(x)∨hB(x))。
定理4设A,B,C∈TFS(U;L),则
1)A∩tA=A,A∪tA=A;
2)A∩tB=B∩tA,A∪tB=B∪tA;
3) (A∩tB)∩tC=A∩t(B∩tC);
(A∪tB)∪tC=A∪t(B∪tC);
4)A∩t(B∪tA)=A,A∪t(B∩tA)=A;
5)A⊆tB⟺A∪tB=B,A⊆tB⟺A∩tB=A。
定义13设U为论域,TFS1(U)为U上普通三支模糊集构成的分明集合,A∈TFS1(U)。定义A的补集(记为Act)如下:∀x∈U,
Act(x)=(hA(x), 1-gA(x),fA(x))。
定理5设A,B∈TFS1(U)。则
1) (Act)ct=A;
2)A⊆tB⟹Bct⊆tAct;
3) (A∩tB)ct=Act∪tBct;
4) (A∪tB)ct=Act∩tBct。
定理6设U为论域,TFS1(U)为U上普通三支模糊集构成的分明集。则(TFS1(U),∪t,∩t,ct, 0t, 1t)是广义De Morgan代数。
下面的例子说明,由于运算∪t,∩t的分配律未必成立,故定理6中的结论不能修改为De Morgan代数。
例8设x=(0.3, 0.8, 0.2),y=(0.7, 0.5, 0.3),z=(0.6, 0.8, 0.25)。则
(x∧ty)∨tz=(0.6, 0.8, 0.25);
(x∨tz)∧t(y∨tz)=(0.6, 1, 0.25);
(x∧ty)∨tz≠(x∨tz)∧t(y∨tz)。
对于论域U上的依赖三支模糊集,由于其特殊性(隶属度均取自[0,1],且∀x∈U,f(x)+g(x)+h(x)≤1),故其并、交运算需要专门定义(以保证分别对应上、下确界)。
定义14设U为论域,TFS2(U)是U上依赖三支模糊集构成的分明集合。∀A,B∈TFS2(U),定义其并、交运算如下:∀x∈U,
1) 若(fA(x),gA(x),hA(x))≤t(fB(x),gB(x),hB(x)),则
(A∪dB)(x)=(fB(x),gB(x),hB(x));
(A∩dB)(x)=(fA(x),gA(x),hA(x))。
2) 若(fA(x),gA(x),hA(x))与(fB(x),gB(x),hB(x))在序关系≤t下不可比,则
(A∪dB)(x)=(fA(x)∨fB(x), 0,hA(x)∧hB(x));
(A∩dB)(x)=(fA(x)∧fB(x), 1-(fA(x)∧fB(x))-(hA(x)∨hB(x)),hA(x)∨hB(x))。
下面通过三支集(三划分)为例说明前述交运算的合理性。如前所述(定义7及例1),利用特征函数可以很容易说明:“三支集”与“三划分”没有本质区别。设U为论域,X⊆U,记X的特征函数为mX,其中对任意x∈U,
对于U上的两个三划分〈X1,Y1,Z1〉,〈X2,Y2,Z2〉, 按正域、边界域、负域的语义,定义它们的交运算的自然方式是:
〈X1,Y1,Z1〉∩〈X2,Y2,Z2〉=
〈X1∩X2,U-((X1∩X2)∪Z1∪Z2),Z1∪Z2〉。
如果将这两个三划分看作三支集,上述运算正好对应定义14中的交运算,即
〈mX1,mY1,mZ1〉∩t〈mX2,mY2,mZ2〉=
〈mX1∩X2,mU-((X1∩X2)∪Z1∪Z2),mZ1∪Z2〉
这一事实从一个侧面表明,定义14具有合理性。
3 三支模糊逻辑与推理
3.1 三支模糊关系
定义15设U,V是非空集合,(L,∨,∧, 0, 1)是有界格,D*(L)={(x1,x2,x3) |x1,x2,x3∈L∪{*}}。U×V到D*(L)的一个三支模糊关系R是指U×V上的三支模糊集,即
R={〈(u,v),fR(u,v),gR(u,v),hR(u,v)〉 | (u,v)∈U×V},
其中,fR,gR,hR:U×V→L∪{*}。
将U×V上的全体三支模糊关系记作TFR(U×V,L);当L=[0,1]时简记为TFR(U×V);当L=[0,1]且所有隶属度都有定义时简记为TFR1(U×V),即普通三支模糊关系。
定义16设U,V,W是非空集合,(L,∨,∧, 0, 1)是有界格,R∈TFR(U×V,L),S∈TFR(V×W,L)。R与S的合成R∘S定义为:R∘S∈TFR(U×W,L),∀(u,w)∈U×W,
∧t(fS(v,w),gS(v,w),hS(v,w)))
三支模糊关系与集对分析(set pair analysis,简记为SPA)有密切联系。集对分析理论由我国学者赵克勤于1989年提出[31], 其主要的数学工具是联系数。“集对”是由一定联系的两个集合组成的基本单位,对“集对”中的2个集合作特性分析时,采用“同”“异”“反”的三分法思想,比较对象之间的同一性、差异性(既不同一也不对立,与同一有差异、与对立也有差异,如中介、不确定、不确知、数据缺失等)、对立(矛盾)性,进而用“联系数”形式地表示为U=A+Bi+Cj,这里j表示对立,i表示差异。从这些描述可以看出,“集对”就是前述三支模糊关系中的序对(u,v)∈U×V,“同”“异”“反”正好对应fR(u,v),gR(u,v),hR(u,v),因此,用三支模糊关系可以表达集对分析思想,同时也可借鉴集对分析中的方法研究三支模糊集(这是很有意义的课题,将在后续论文中探究)。
3.2 三支模糊蕴涵算子
作为[0, 1]上模糊蕴涵算子的推广,这里引入三支模糊蕴涵算子的概念,将限制在D([0, 1])上讨论,即
D([0, 1])={(x1,x2,x3) |x1,x2,x3∈[0, 1]}。
三支模糊蕴涵算子是指D([0, 1])×D([0, 1])到D([0, 1])上的映射,仍用符号“→”来表示。这里使用D([0, 1])上的序关系≤t,即(参见定义10):∀x,y∈D([0, 1]),
x≤ty⟺(x1
定义17设“→”是D([0, 1])×D([0, 1])到D([0, 1])上的映射,如果满足以下条件,则称“→”是三支模糊蕴涵:
1) 0t→0t=0t→1t=1t→1t=1t,
1t→0t=0t;
2) ∀x,y,z∈D([0, 1]),
x≤ty⟹z→x≤tz→y;
x≤ty⟹y→z≤tx→z。
例9以下D([0, 1])×D([0, 1])到D([0, 1])上的映射(除算子2)外,见注6)均是三支模糊蕴涵:
1) Zadeh型三支模糊蕴涵算子
x→y=xct∨t(x∧ty),∀x,y∈D([0, 1])。
2) Mamdani型三支模糊蕴涵算子
x→y=x∧ty,∀x,y∈D([0, 1])。
3) Kleene-Denes型三支模糊蕴涵算子
x→y=xct∨ty,∀x,y∈D([0, 1])。
4)R0型三支模糊蕴涵算子
∀x,y∈D([0, 1]),当x≤ty时x→y=1t;否则,x→y=xct∨ty。
5) Gödel型三支模糊蕴涵算子
∀x,y∈D([0, 1]),当x≤ty时x→y=1t;否则,x→y=y。
3.3 三支模糊推理的TCRI方法
借鉴Zadeh的模糊推理CRI方法,本节运用三支模糊关系合成运算及三支模糊蕴涵给出一种新的模糊推理方法,简记为TCRI。
一般的模糊推理模型如下:
其中A,A′是U上的三支模糊集;B,B′是V上的三支模糊集。称上述形式为三支模糊假言推理,简记为TFMP。
求解TFMP问题的TCRI方法的步骤如下:
1) 选取论域U上的三支模糊集A={〈x,fA(x),gA(x),hA(x)〉 |x∈U},A′={〈x,fA′(x),gA′(x),hA′(x)〉 |x∈U},及论域V上的三支模糊集B={〈x,fB(x),gB(x),hB(x)〉 |x∈V},B′={〈x,fB′(x),gB′(x),hB′(x)〉 |x∈V}分别表示命题A,A′及B,B′。
2) 选取一个三支模糊蕴涵算子→,把规则A→B转化为U×V上的一个三支模糊关系R。
3) 将A′与上述三支模糊关系R进行复合即得B′=A′∘R=A′∘(A→B)。
4) 最后将所有推理结果以某种方法聚合(比如取三支模糊集的并运算)而得到结论。当然,也可以先将所有规则聚合(比如取三支模糊集的并运算)为一条超规则,然后求解在这条超规则下的推理结果。
4 三支模糊集的应用
4.1 三支集在数据分析中的应用
针对不完备决策信息表,本节通过三支集及其运算(三支集交运算采用定义14),给出基于三支集的知识约简方法。
算法1基于三支集的不完备决策信息表的属性约简算法
输入 不完备决策表DT=〈U,A∪{d}〉
输出 属性集A的三支约简。
步骤1构造每个属性a∈A所对应的三支集Ba=〈fa,ga,ha〉,如下所示,对任意x∈U,
步骤2计算属性集A中所有的可约元(规定在三支集族{Ba:a∈A}中,若某个三支集可由其他几个三支集的交运算得到,则称其为一个三支可约元);
步骤3从属性集A中剔除所有三支可约元,则得到属性集A的三支约简,记为Reduct(A)。
若将算法1中研究对象“属性集A”改为“论域U”,则通过类似的方法可以得到论域U的三支约简,记为Reduct(A)。
因此,可将上述约简方法用于不完备信息下的决策问题,具体方法如算法2所示。
算法2基于三支集的不完备决策信息表的决策规则提取算法
输入 不完备决策表DT=〈U,A∪{d}〉,决策目标y
输出 决策目标y的决策值
步骤1利用算法1,计算属性集A的三支约简Reduct(A);
步骤2利用算法2,计算论域U的三支约简Reduct(U);
步骤3根据步骤1和步骤2得到的约简后的决策表DT=〈Reduct(U),Reduct(A)∪{d}〉,并对其进行补齐和去重,从而得到相应的决策规则,实现对决策目标y的决策。
基于算法1和算法2,以下给出三支集在知识约简与决策中的应用实例。
例10设(U,A∪{d})为不完备决策信息表(见表2),其中U={x1,…,x6},A={a1,…,a4},ai(xj)为样本xj在条件属性ai下的属性值。
则根据决策信息表,将通过算法2利用三支集及相应的运算对新的样本x7进行决策:
步骤1利用三支集对属性进行约简,过程如下所示:对任意ai∈A,xj∈U,令
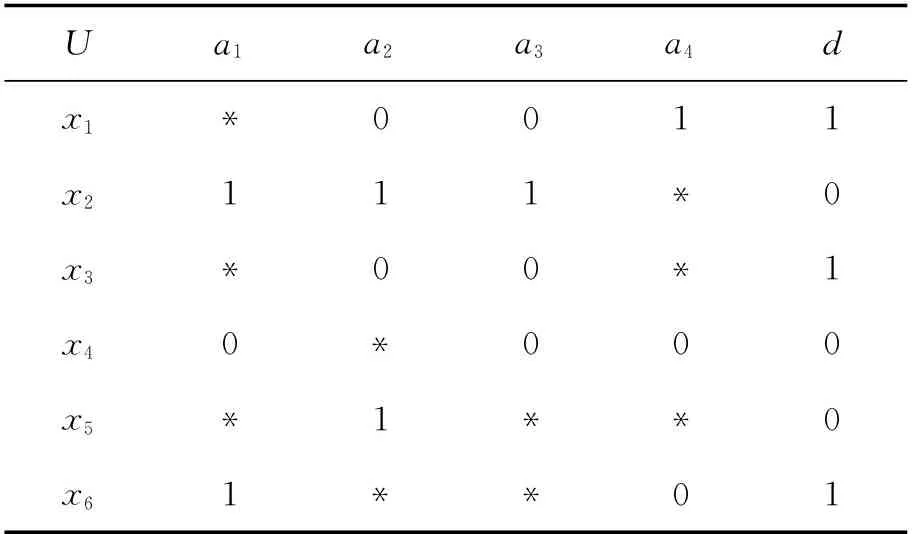
表2 不完备决策信息表Tab.2 Incomplete decision information table
则属性a1对应的三支集为:

同理可得属性a2,a3和a4对应的如下三支集,



规定三支集族{Ba1,Ba2,Ba3,Ba4}中,若某个三支集可由其他几个三支集的交得到,则称其为三支可约元。由于Ba3=Ba1∩dBa2,则Ba3为一个三支可约元。故称{Ba1,Ba2,Ba4}为一个三支约简,即{a1,a2,a4}为决策信息表的一个属性约简。
步骤2利用三支集对对象进行约简,过程如下所示:对任意ai∈A,xj∈U,令
则对象x1对应的三支集为:
同理可得对象x2,…,x6对应的如下三支集,
因此, 在三支集族{Cx1, …,Cx6}中, 由于Cx3=Cx1∩dCx5,则Cx3为一个三支可约元。 故称{Cx1,Cx2,Cx4,Cx5,Cx6}为一个三支约简, 即{x1,x2,x4,x5,x6}为决策表的一个对象约简。
步骤3根据步骤1和步骤2得到的约简后的决策信息表,如表3所示。
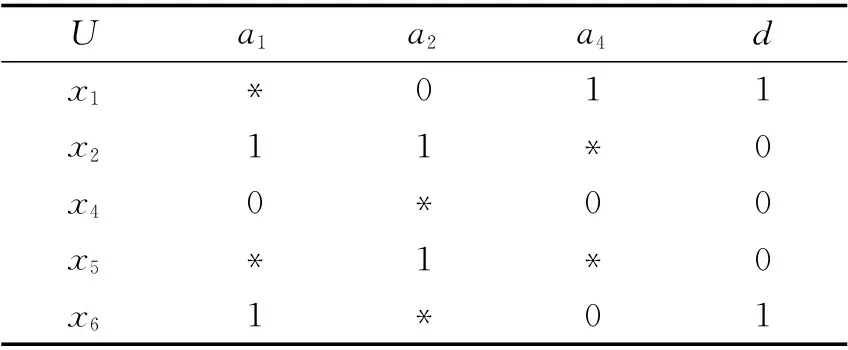
表3 约简后的决策信息表Tab.3 Reduced decision information table
利用基于类别的最大概率值方法将表3补齐,并删除条件属性值与决策属性值相同的对象,得到表4。
由表4可得到如下决策规则。
规则1若 (a1=1,a2=0,a4=1) 或
(a1=1,a2=0,a4=0),则d=1。
规则2若 (a1=1,a2=1,a4=0) 或
(a1=0,a2=1,a4=0),则d=0。
假设新的对象x7在各个条件属性下的取值为a1(x7)=1,a2(x7)=0,a3(x7)=0,a4(x7)=1。据规则1可知,x7所对应的决策属性值为1。
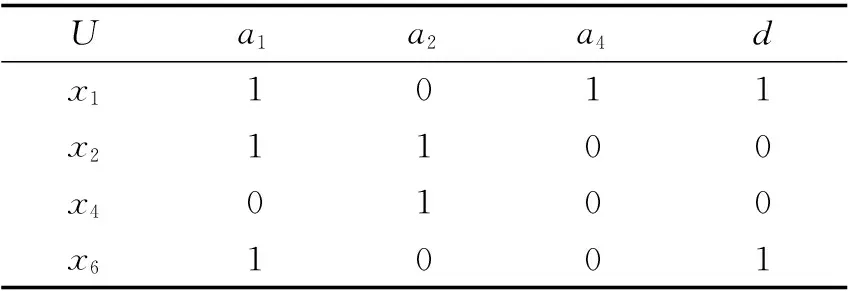
表4 补齐与去重后的决策信息表
注5本例直接利用三支集处理不完备决策信息系统,避免了完备化后再处理数据所带来的信息损失。本例中主要是根据决策信息表的特点提出了一种三支集的构造方法,在实际应用中可根据数据的特点构造其他类型的三支模糊集。所提出的三支模糊集可以扩充现有的属性约简和决策方法。
4.2 三支模糊集在控制系统中的应用
水位控制系统广泛应用于能源、化工等诸多领域,本节针对单容水箱水位控制过程,建立三支模糊推理模型,利用Matlab深入比较和分析传统模糊推理与三支模糊推理下的控制仿真效果。
4.2.1 不同推理方法的推理结果比较分析
设水位偏差e、偏差变化率ec和控制量u的取值域均为[-6,6],表示其模糊大小的语言值用7个三支模糊集表示:NB、 NM、 NS、 ZE、 PS、 PM、 PB。图2给出了NS(负小)对应的三支隶属函数。

图2 e的三支模糊集NS的隶属函数Fig.2 Membership functions of three fuzzy subset NS of e
构建三支模糊控制器,模糊控制规则沿用文献[32]中的表1,采用Mamdani型三支模糊蕴涵算子(见例9)。e、ec按步长0.5取值,分别用CRI方法、TCRI方法进行推理,得到控制量u的精确值,如图3、图4所示。

图3 CRI方法的推理结果Fig.3 Inference results of CRI
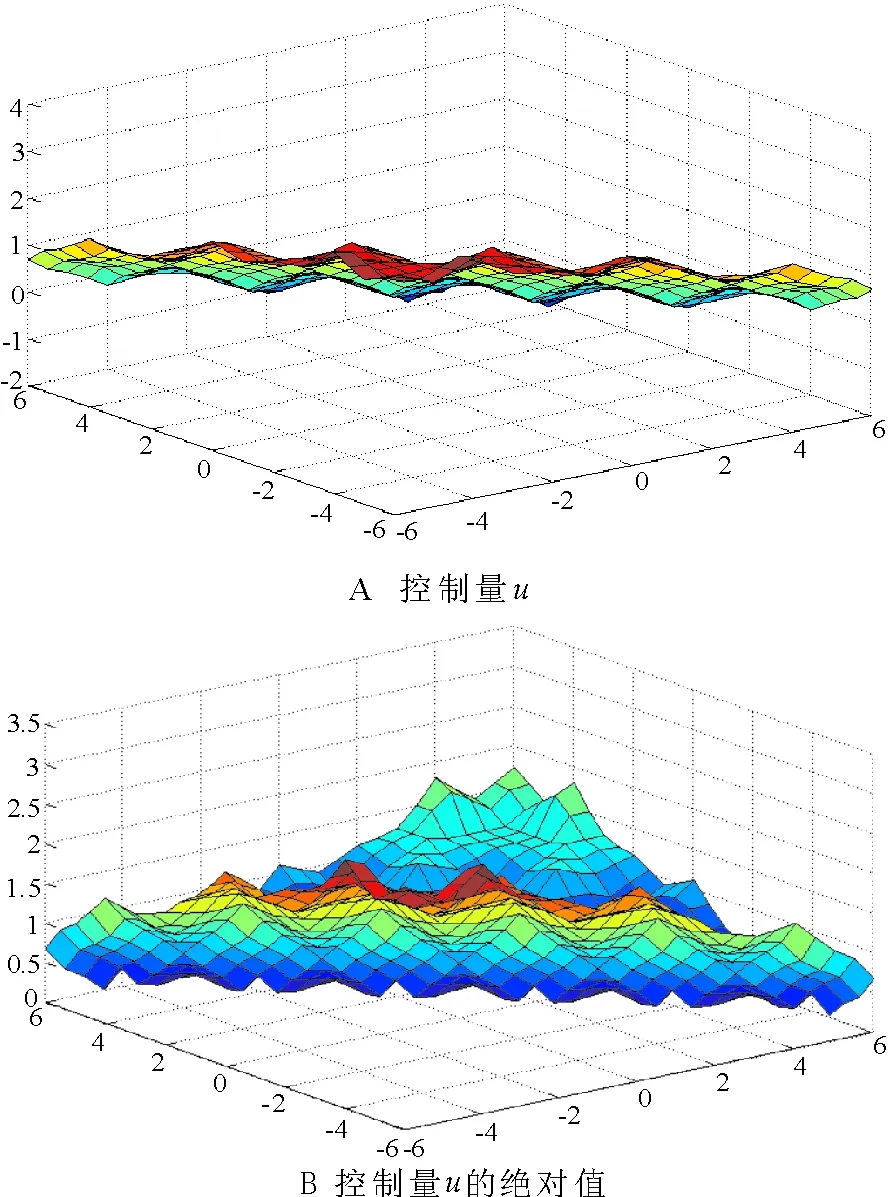
图4 TCRI方法的推理结果Fig.4 Inference results of TCRI
由图3、图4可知,首先,TCRI方法可以获得合理结果。其次,从图3、图4的A图可以看出,TCRI方法的推理输出曲线比较平滑且变化最为平缓;CRI方法的推理输出曲线不是那么平整,输出响应则显得相对较快。最后,从图3、图4的B图可以看出,TCRI方法的推理结果在u=0附近,曲面U可以近似为二次抛物面,u的变化小,对输入的响应不灵敏,这是系统产生稳态误差的根本原因,但系统的稳定性较好; CRI方法的推理结果在u=0附近,u的变化大,对输入的响应较灵敏,控制系统灵敏度高。
4.2.2 不同推理方法控制效果分析
1)跟踪能力对比分析
利用上述推理方法对单容水箱液位控制系统[33]进行仿真控制,仿真结果如图5、图6所示。
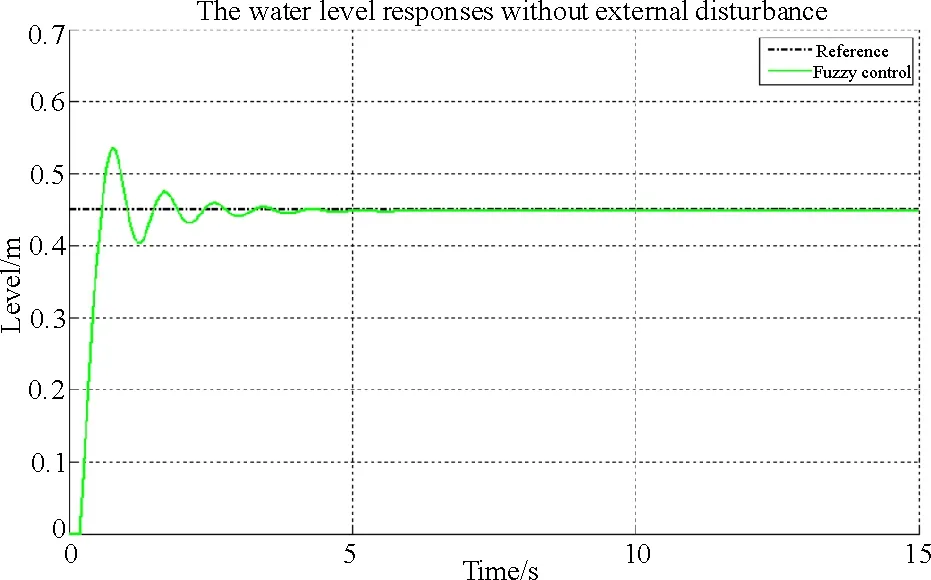
图5 无扰动时CRI方法的控制效果Fig.5 Control effect of CRI without disturbance
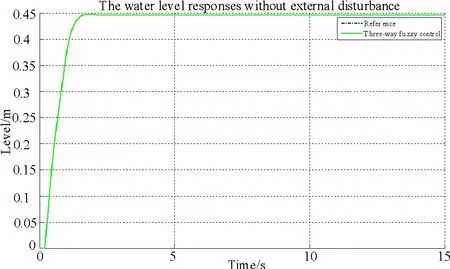
图6 无扰动时TCRI方法的控制效果Fig.6 Control effect of TCRI without disturbance
同时,为进一步量化不同方案下系统在跟踪输入时的动态响应性能,对实验中两种策略下系统的超调量(σ%)和调节时间(ts)进行计算,调节时间采用2%的误差带。系统动态特性的量化指标如表5所示。
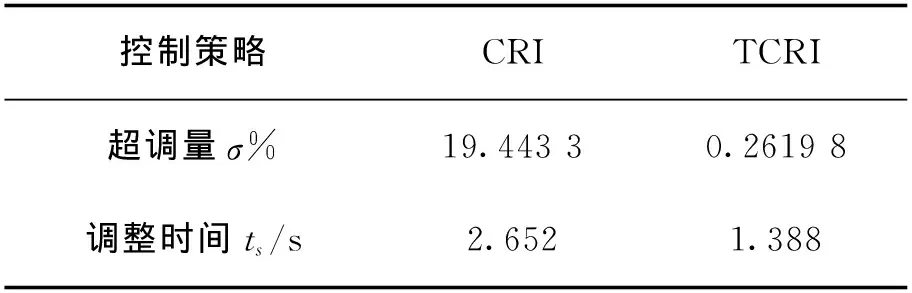
表5 不同推理方法下系统的动态性能指标
2)抗扰能力对比分析
为衡量控制器的抗扰能力,在7s≤t≤9s时分别对各控制端施加单位阶跃扰动,各控制器的阶跃干扰响应曲线分别如图7、图8所示。
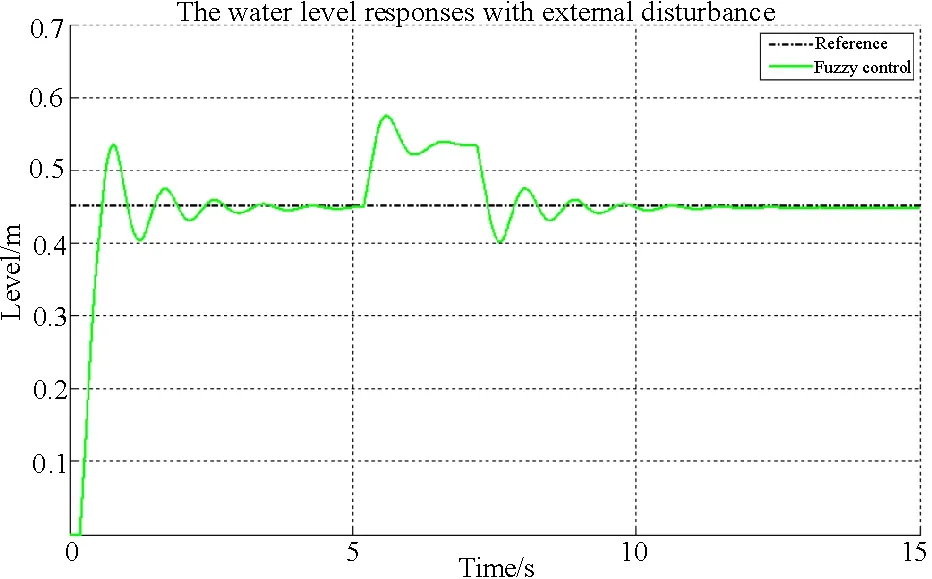
图7 有扰动时CRI方法的控制效果Fig.7 Control effect of CRI with disturbance

图8 有扰动时TCRI方法的控制效果Fig.8 Control effect of TCRI with disturbance
为进一步量化不同方案下系统的抗扰能力, 对两种控制策略下系统的振荡幅值(m)和恢复时间(s)进行计算, 系统的抗扰量化指标如表6所示。
实验结果表明:①由仿真曲线(见图5、图6)及量化数据(见表5)可知,TCRI的指标都明显优于CRI,即TCRI具有更好的跟踪能力。②由仿真曲线(见图7、图8)及量化数据(见表6)可知,在TCRI控制下,扰动引起的系统振荡幅度小,系统恢复至设定值所用时间短,即TCRI控制具备更强的抗干扰能力。

表6 抗扰指标量化表Tab.6 Immunity index quantification table
注6在传统模糊集理论中, Mamdani蕴涵严格意义上不是模糊蕴涵算子, 但由于其在模糊控制中经常被使用, 因此, 通常被列入常见的模糊蕴涵之列。 类似地, 本文也沿用这种做法, 但需要指出例9中算子2)不完全满足定义17中的条件。
5 结语
基于三支决策、粗糙集及多种广义模糊集理论,本文首次提出三支模糊集的概念,讨论了三支模糊集的包含关系和并/交运算,并通过不完备信息表的数据分析、单容水箱的液位控制两个具体例子展示了三支模糊集的初步应用。
需要说明的是, 三支模糊集是一个非常宽泛的概念, 它与许多广义模糊集有密切关系, 除了前文提到的外, 还有三维模糊集[34]、 Picture模糊集[35]、 3-极模糊集[36]、 三元模糊集[37]等。 本文突出展示了三支模糊集与这些概念的不同之处, 体现在广泛性(比如隶属度值可以有缺失, 即用“部分映射”取代映射)、 新的包含关系和并/交运算(对应的代数结构是广义De Morgan代数而非De Morgan代数)、 丰富而有说服力的语义解释(回答了为什么需要3个隶属函数,比如当正、 反、 中立在不同基准上进行评价时自然产生3个模糊集, 比如模糊粗糙集的正域、 负域、 边界域本身就是3个经典模糊集等)、 可用性(本文给出了应用实例)。
本文只是三支模糊集的初步研究,后续还将陆续讨论三支模糊集的多种新运算、基于3I方法的三支模糊推理(对文献[38]中方法的进一步拓展),以及三支模糊集的更多应用(包括在数据分析与挖掘、不确定决策、图像处理、神经模糊控制等方面的应用)。
致谢:本文的研究思想多年前就已基本成型,许多同行给予了支持和指点;本文初稿在2020年第二届陕西省智能数据分析暨第八届三支决策与粒计算研讨会(空军工程大学主办)进行了报告,此次发表时吸收了与会专家提出的宝贵意见;同时,三支决策理论的创始人Y.Y.Yao教授对本文的写作给予了热情指导,谨在此一并表示感谢!
