一类复杂耦合系统的有限时间集群分析
2022-07-01汪楚翔刘易成茹立宁
汪楚翔 刘易成 茹立宁
(国防科技大学文理学院,长沙,410073)
1 引言
集群行为是自然界中普遍存在的一种现象. 它表示一些自驱动的个体在一定的规则下,从杂乱无章的无序状态演化为有序的群体运动现象[1]. 最常见的群体包括鸟群、鱼群、羊群以及菌群等等[2]. 由于在网络、机器人、无人机等领域方面有重要应用[3,4],这些现象吸引了众多学者的关注. 1995 年,Vicsek 等人总结Reynolds等人[5]的研究成果,提出了一种具体研究集群现象的离散模型,被称为Vicsek模型[6]. 经过对Vicsek 模型的改进,Cucker 和Smale[7,8]于2007 年提出了一种新的连续模型,它可用如下系统描述:其中N为个体的数量,xi,vi分别表示第i个个体的位置和速度;ψ是一个非负,非增的函数,表示粒子i与j之间的通信权重函数,表达式为ψ(s) =,β> 0. 作者证明了当β<时,系统产生无条件集群现象;而当β≥时,在初始值满足一定条件的情形下,系统发生集群现象.随后,Ha等人[9]利用能量泛函法将结果进一步改进,证明了当β=时,系统也发生无条件集群现象.

在上述研究的结果中,集群行为是在时间趋于无穷时渐近发生的,即收敛时间是长期的. 但是,研究者更关心的是能否在有限时间内系统产生集群现象. 事实上,在自然界中,鱼群被捕食者撞散后,经过一段时间可再次聚集,重新形成有序的群体. 这是一种有限时间集群现象. 目前,研究此类问题的学者相对较少,具体可参见相关文献[10–16].
在文献[16]中,作者提出了一种扩展C S 模型,使得系统在有限时间内发生集群现象,其中通信函数ψ选取为奇异函数. 受此启发,本文探索在非奇异通信函数影响下,这类C S 模型能否在有限时间内产生集群行为. 事实上,我们发现: 当初始值满足一定条件时,系统将发生有限时间集群,并且收敛时间T可由个体数量N以及个体初始速度等参数决定.
本文安排如下: 在第二节,我们提出一种新的动力学系统,给出几个引理,并对系统的解做初步估计. 在第三节中,我们利用能量泛函方法,证明在个体初始位移满足一定条件时,系统在有限时间内发生集群行为,并进一步给出收敛时间的具体表达式. 对应的数值模拟在第四节中给出.
2 问题描述与引理
我们在d维欧氏空间中考虑一个由N个个体组成的动力学自治系统. 设xi ∈Rd,vi ∈Rd分别表示第i个个体的位置和速度,且满足以下方程:

其中通信函数ψ定义为ψ(r)=,α>0,函数Γ:Rd →Rd表示第i个个体与第j个个体之间的速度耦合,A为正常数(用于防止个体间相撞). 对给定的v= (v1,v2,··· ,vd)∈Rd,类似文献[10],假设Γ 满足如下两条性质:

下面我们给出几个引理以及系统(2.1)在有限时间内发生集群的定义.
引理2.1([11]) 假设函数φ满足φ(xi,xj)=−φ(xj,xi),i,j=1,2,··· ,N,i ̸=j,则

且对任意给定的y1,y2,··· ,yN,有


其中耦合函数Γ 满足的条件与本文相同. 作者证明了当时,系统可在有限时间内发生集群. 本文将原始C S 模型与上述系统结合起来,作为一种新的推广模型,适应范围更加广泛,并得出了相似的结果.
注2.3在假设(H2)中,参数γ ∈(,1)的限制可以适当放宽. 当γ ≥1 时,我们仍可得类似的结果. 由于此时引理2.4 的条件不再适用,因此集群不能在有限时间内发生,而在时间趋向于无穷时渐近达到. 作为补充,相应的结果及证明将在本文的最后给出.
定义2.1([20]) 对于任意给定的初始值{xi(0),vi(0)},i= 1,2,··· ,N, 若系统(2.1) 的解{xi(t),vi(t)}满足以下两个条件,则称系统(2.1)在有限时间内发生集群:(1)所有个体速度之差在有限时间内趋于0,即

其中T1=inf{T|‖vi(t)−vj(t)‖=0,∀t ≥T},称为收敛时间;
(2)群体的直径有界,即
3 有限时间发生集群的条件
3.1 解的预先估计
首先,类似文献[1–5],我们对系统(2.1)的解做出初步分析.
设x(t)=(x1(t),x2(t),··· ,xN(t)),v(t)=(v1(t),v2(t),··· ,vN(t)),


事实上,令

则不难验证


直接计算可得

由此可知,若在有限时间内V(t)趋于0,且X(t)有界,那么定义2.1 的条件即可满足,从而发生有限时间内集群.
我们给出如下引理:


其中
代入(3.5)式可得

两边对t积分,得

从而

且

引理证毕.
3.2 有限时间集群
在这一节中,考虑系统(2.1)中通信函数取ψ(r) =,α> 0 的情形. 类似文献[21]的方法,定义函数Lβ(t):
引入最大时间跨度T(x(0)):
T(x(0))≜max{t ∈R+|系统(2.1)的解{(xi(t),vi(t)}在[0,t)中存在},
其依赖于初始值x(0)的选取,简记为T0.
定理3.1假设初始值满足‖xj(0)−xi(0)‖> 0,i,j= 1,2,··· ,N,i ̸=j,则对系统(2.1)的解{xi(t),vi(t)},t ≥0,有:
当α=1 时,

当α>1 时,

证明当α=1 时,

对t ∈[0,T0),两边积分可得
当α>1 时,直接计算可知(C为常数,不同等式中可能不相同):

对t ∈[0,T0),利用Gronwall 不等式,得到

令α=β −1,可得

定理证毕.
定理3.2假设α ≥1,初始值满足‖xj(0)−xi(0)‖> 0,i,j= 1,2,··· ,N,i ̸=j,则系统(2.1)能在有限时间内发生集群,收敛时间T为

证明根据定理3.1,‖xj(t)−xi(t)‖有上界,即存在正的常数M使得

进而可得

由引理2.4 可知

其中

在(3.5)式中对t积分,可得
根据定义1,定理证毕.
定理3.3设γ ≥1,α ≥1,初始值满足‖xj(0)−xi(0)‖> 0,i,j= 1,2,··· ,N,i ̸=j,则系统(2.1)发生渐近集群,即收敛时间T无界.
证明与定理3.2 证明过程类似,可知

情形1γ=1. 上式化简为
根据引理2.5,T可取为∞,即收敛时间无界,且

情形2γ>1. 由引理3 易得
根据引理2.5,T可取为∞,即收敛时间无界,且

定理得证.
4 数值模拟
本节选取具体的参数值进行数值模拟,验证本文主要结果. 取A= 1,C0= 1,Δt= 0.01,个体的初始位移与速度分别在0 到200 之间,0 到10 之间随机取值,其余参数的取值见以下各例.
例1 取α= 1,γ= 0.55,N= 10,仿真结果在图1 中给出. 图1(左)表明每个个体的速度,经过t=10s 左右,速度差已经趋于零. 图1(右)表明各个个体之间位移差的最大值,经过短暂的波动以后,在10s 左右也趋于稳定.此外,根据(3.11)式,收敛时间T=204.96s. 这些数值结果有效验证了定理3.2 的结果.
为了突出速度耦合函数与收敛时间的关系,现在改变γ的值,其它参数保持不变,见图2 和图3.
例2 取α= 1,N= 10,分别取γ= 0.75,γ= 0.95. 仿真结果分别在图2 和图3 中给出. 图2(左)、图3(左)表示每个个体的速度,可以看出时间相比图1 明显变长,尤其是图3(左),速度在经过t= 20s 左右之后才达到平衡.图2(右)、图3(右)则显示个体的最大位移差稍有增加,同样在相应的时间稳定下来.根据(3.11)式,收敛时间分别为T=98.27s,T=131.25s,仍符合定理3.2 的结果.
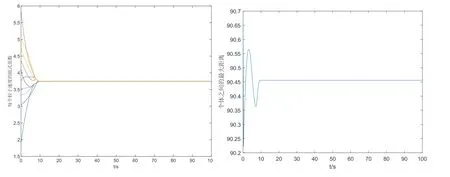
图1 α=1,γ =0.55,N =10,收敛时间T =204.96s,同时个体之间的最大位移差有界

图2 α=1,N =10,γ =0.75,收敛时间T =98.27s,同时个体之间的最大位移差有界
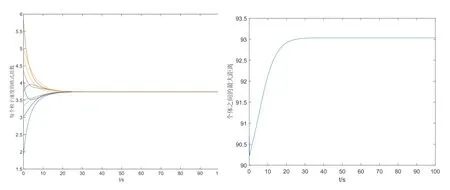
图3 α=1,N =10,γ =0.95,收敛时间T =131.25s,同时个体之间的最大位移差有界
下例将改变个体数量,同时取不同的γ,并观察相应结果,见图4,图5 和图6.
例3 取N= 50,其余参数如上两例,仿真结果在图4,图5 和图6 中给出. 不难发现,个体数量显著增加以后,收敛时间也相应增加(在相同的γ下),同时收敛的速度有所下降;个体最大位移差先是有所下降,然后重新上升,最后达到平衡.另一方面,从收敛时间的表达式我们也能看出,指数γ对收敛时间的影响应大于个体数量N.
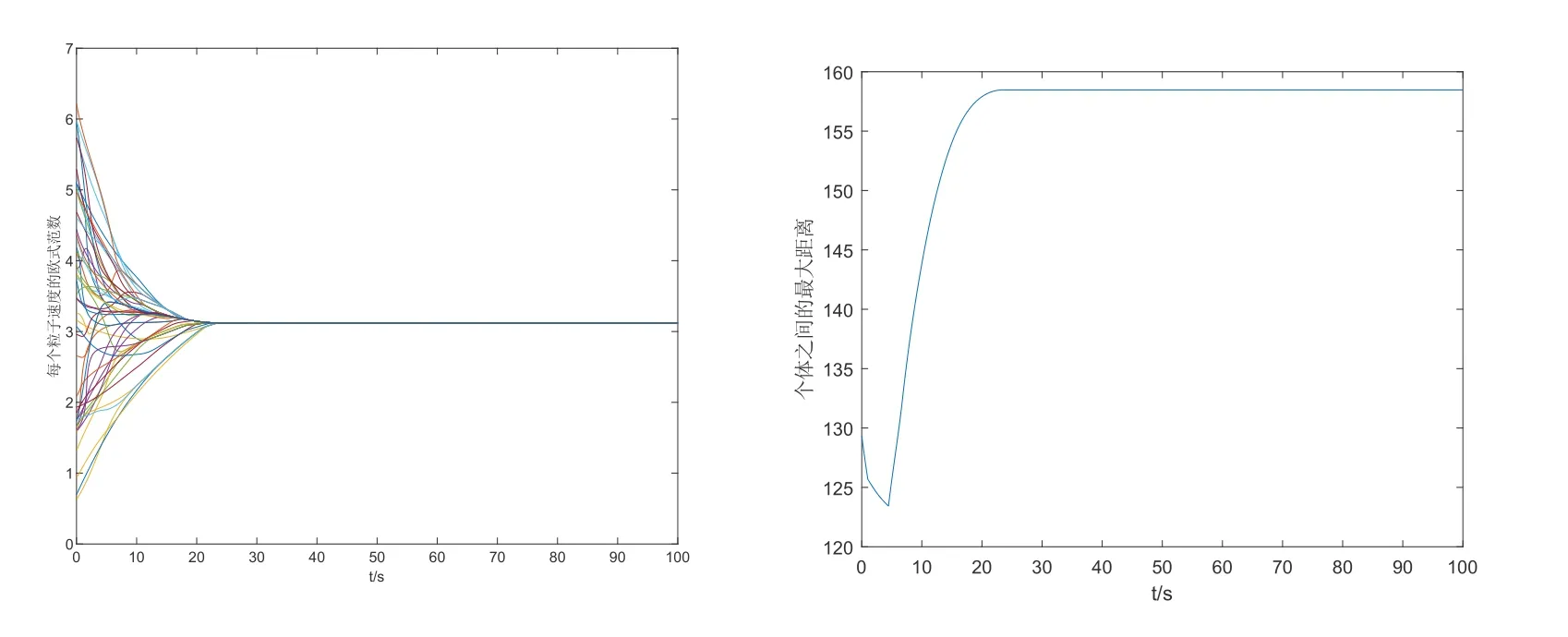
图4 α=1,N =50,γ =0.55,收敛时间T =283.07s,同时个体之间的最大位移差有界
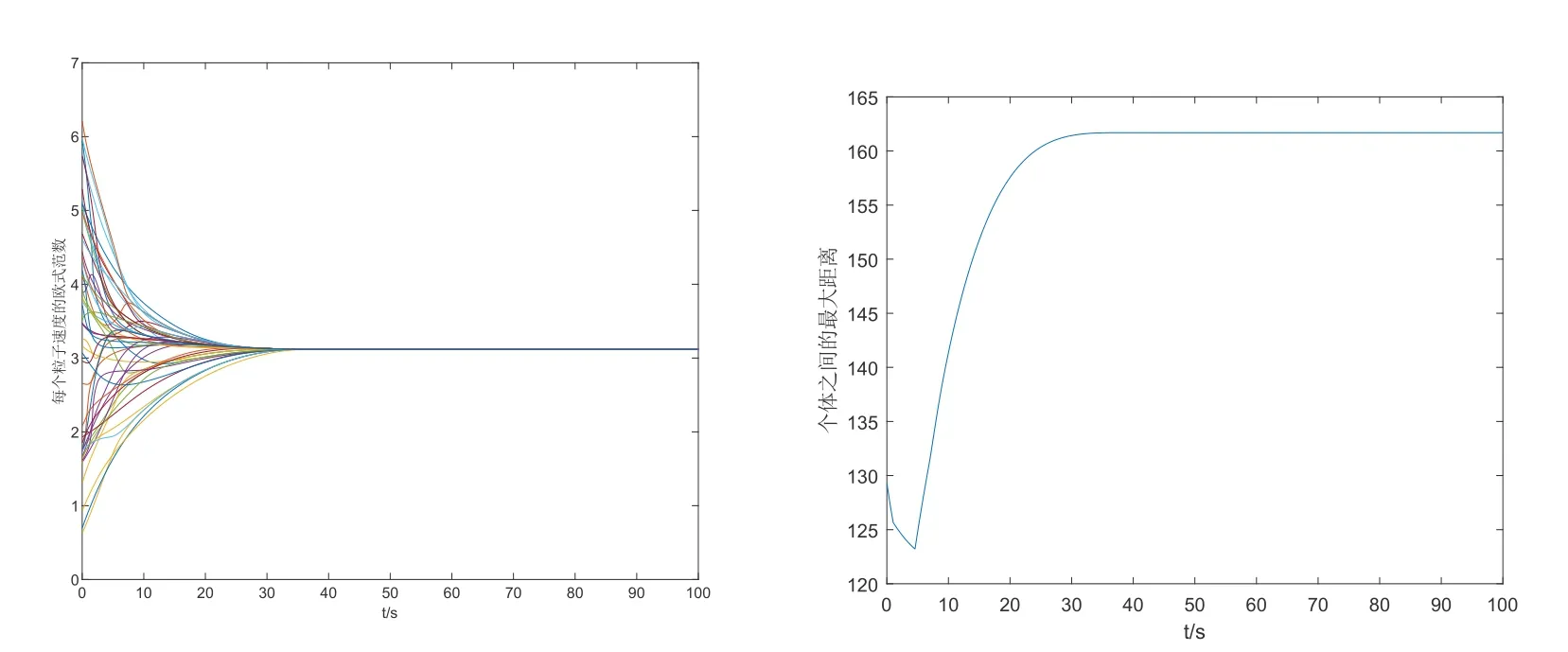
图5 α=1,N =50,γ =0.75,收敛时间T =105.97s,同时个体之间的最大位移差有界
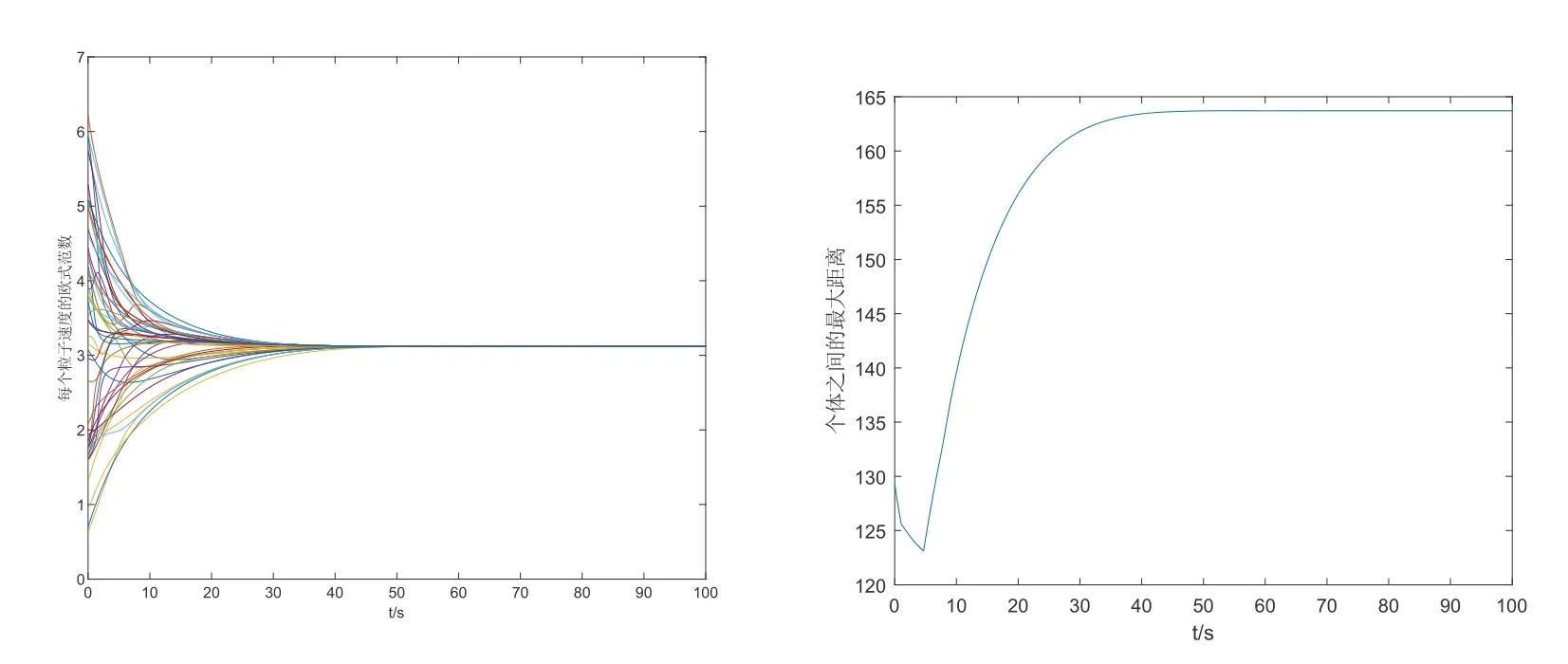
图6 α=1,N =50,γ =0.95,收敛时间T =91.35s,同时个体之间的最大位移差有界
