一种限制路种类识别方法
2022-06-24刘义乐李胜凯
刘 凯,刘义乐,李胜凯
(1.陆军装甲兵学院车辆工程系,北京 100072;2.31694部队97分队,辽宁 本溪 117000)
0 引言
科学合理的进行履带车辆的训练评价是保障履带车辆训练效果的重要保证。当前,在进行履带车辆训练时,仍然是由教练跟车在履带车上用肉眼对学员进行评定,不光耗费人力,而且由于主观因素的影响,评价的准确性不可保证。使用GPS系统对履带车辆考核场地限制路点位的定位,是建立考核系统中场地分布的基础。由于每个考核项目的限制路的标志杆数量和位置不同,因此设计出能同时识别多项考核科目的限制路是首先要解决的问题。
每个限制路都是由若干个标志杆以特定位置摆放而形成的,分析每个限制路的标志杆相互关系可知:
1)不同种类限制路的标志杆之间的距离特征不同;
2)每种限制路的标志杆两两标志杆的距离不变;
3)每种限制路之间的间隔距离较大,不互相影响。
履带车辆主要要通过“S”形限制路、弯道限制路、双直角转向限制路等。基于每个限制路的各个标志杆间的距离的特点,以及利用GPS定位各个标志杆位置数据,设计了一种识别限制路类型与场地标定的算法。该算法可以在若干个测得的GPS坐标中,将每个限制路的标志杆进行分类,并存入相应的表格中,以完成履带车辆考核场地的标定。
1 限制路种类识别
1.1 将GPS坐标转换为平面坐标
进行限制路种类识别与分类,首先需要收集若干个具体GPS坐标数据(其中含有干扰坐标),以第一列为经度,第二列为纬度放入Excel表格中,参考《GPS经纬度坐标转平面坐标的简化计算方法及精度分析》中算法将GPS坐标转化为XY坐标。然后将其全部转化,利用为平面坐标(即以赤道为X轴,0经线为Y轴),利用算法进行转化,并输出平面坐标数据存入Excel表格中。
记录GPS坐标的精度可以达到±0.1 m,因此对于限制路识别的准确性有保证。
1.2 限制路的特征
以“S”型限制路为例,各个标志杆的位置如图1(假定车辆车宽4 M,车长10 m)
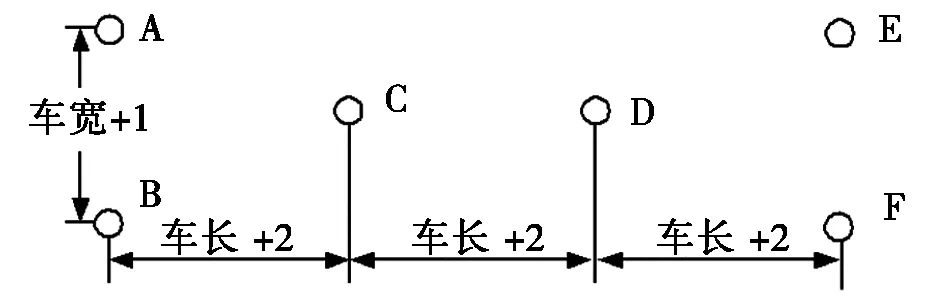
图1 “S”形限制路
将各个限制路中各个标志杆距离计算出来,对于区分在XY数据组中的坐标,可以用距离特征利用算法来实现识别各个限制路的标志杆的位置,假定GPS坐标已转化为平面坐标以“S”形限制路的标志杆识别为例,表1为“S”形限制路的标志杆已知的坐标编号。将“S”形限制路的各标志杆间距中各个标志杆之间距离计算出来,对于区分在平面坐标数据组中的坐标,可以用距离特征利用算法来实现识别各个限制路的标志杆的位置,假定已转化为平面坐标,测得“S”形限制路的标志杆间距离特征如表2。
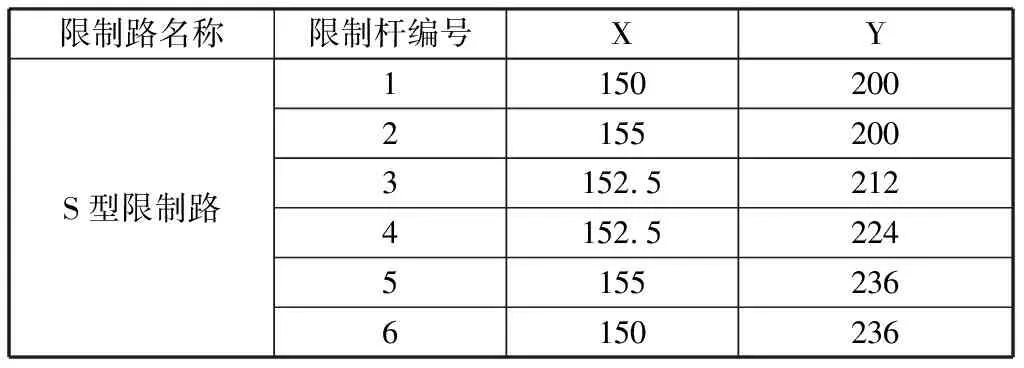
表1 “S”形限制路的标志杆已知的坐标编号

表2 “S”型限制路的标志杆间距离特征
1.3 限制路的标志杆识别算法
下面介绍一种限制路的标志杆识别的算法。该算法将限制路中各个标志杆间的距离作为特征,对所测得的全部坐标系进行筛选,从而得到每个限制路的标志杆的坐标组,并将坐标组与限制路相对应。限制路识别算法的具体流程如图2(以“S”型限制路为例)。
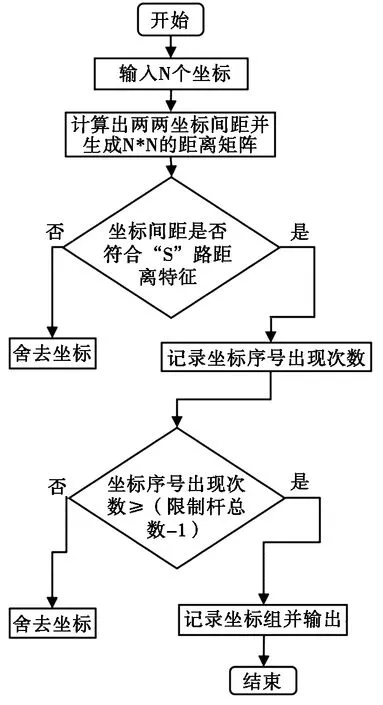
图2 限制路识别与分类算法流程图
1.3.1 单一限制路的标志杆的识别
假设记录的GPS坐标已转化为平面坐标,并得到坐标及序号为表3。
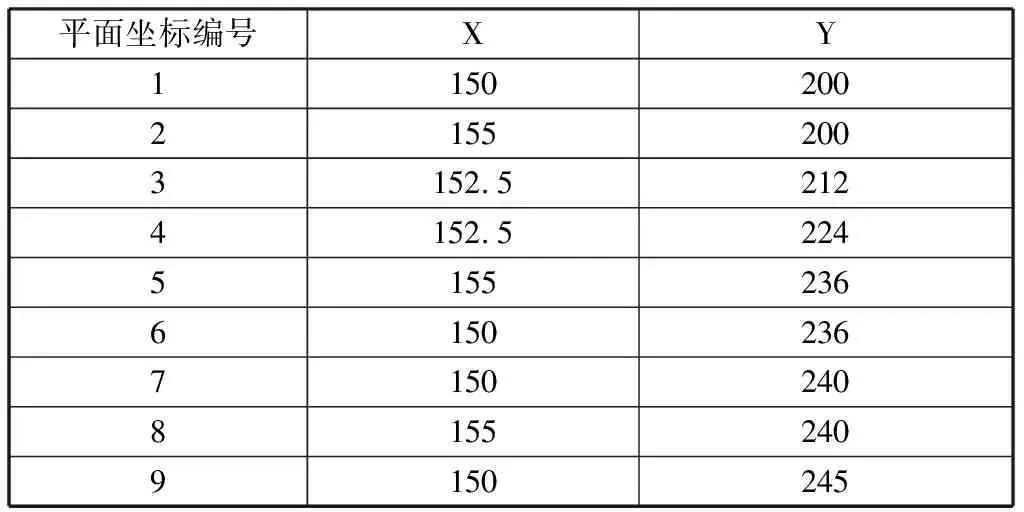
表3 记录的平面坐标及序号
步骤一:将用设备记录的9个GPS坐标转化为平面坐标并输入到一个MATLAB的数组中,使用MATLAB中函数计算各个坐标间的距离,得到坐标间距离如表4。表中的坐标编号m-n的数据为第m个到第n个坐标的间距。

表4 各个坐标间距离
步骤二:对距离特征进行筛选,因为6个“S”形限制路的标志杆间的距离不变且已知,对计算出来的各个坐标间的距离和给出的“S”形限制路的各标志杆间距离进行匹配(表2),并将与规定距离误差小于等于10 cm的两坐标的序号进行记录,式(1)~(6)为距离的符合条件,其中I为第I个坐标点,J为第J个坐标点。并存在一个1×9的计数矩阵中。
4.90≤IJ≤5.10.
(1)
12.16≤IJ≤12.36.
(2)
24.03≤IJ≤24.23.
(3)
35.90≤IJ≤36.10.
(4)
36.25≤IJ≤36.45.
(5)
11.90≤IJ≤12.10.
(6)
步骤三:将步骤二中计数矩阵每个序号出现的次数进行统计,因为“S”形限制路的标志杆有6个,6个标志杆两两之间距离,每个杆与另外杆的距离一共有5个,因此若是“S”形限制路的标志杆,则在次数统计大于等于5的序号即为“S”形限制路的标志杆。统计序号出现次数如表5所示。

表5 计数矩阵
步骤四:对出现5次以上的坐标序号进行记录,并将其对应坐标进行输出。输出坐标如表6所示。
表6 输出的“S”型限制路坐标
以上是用限制路识别与分类算法中对单一限制路标志杆的识别,下面将对其他类型限制路的标志杆加入其中进行分类和识别。若收集的坐标中含有“S”形限制路的标志杆、弯道限制路的标志杆和双直角限制路的标志杆,则主要目的是对收集的全部坐标中的三种限制路的标志杆找出,并分类存放在不同的矩阵中。
1.3.2 对若干种不同限制路的标志杆的识别与分类
基于1.3.1提到的算法,对上文提到的三种限制路分别进行标志杆的识别,因为不同的限制路的距离特征不同,且标志杆的数量也会不都相同,故无论对几种不同限制路的标志杆进行识别的时候,对另外的限制路的标志杆的识别不互相影响。因此可以实现多种限制路的识别。
2 实验验证
2.1 实验数据
为了验证这种方法,在实际场地中测出的限制路杆的位置中识别出各种限制路的标志杆的各坐标,选取了一组含有“S”形限制路的标志杆的数据。
2.2 实验方法
将得到的数据,使用MATLAB软件,按照步骤一到四的顺序,对若干个坐标中各种限制路的标志杆坐标进行匹配并按限制路类型,来验证算法的准确性。
2.3 实验结果
运用上述方法的识别与分类得到的实验结果符合预期,且识别率为100%,识别效果比较理想。但在实际的测量中,可能由于GPS的误差,导致测得的各限制路的标志杆的坐标间距离特征不符合预期。
3 结论
本文通过限制路识别算法,实现了对多种不同限制路的识别,且识别率较高;能够完成对地图上的限制路位置和各个限制杆具体位置的标定。下一步将对同种限制路标志杆组进行区别,实现多种限制路(含重复限制路)的识别。
