一种测向系统的自动化测试方法
2022-06-24阮黎明孙旭祥
阮黎明,孙旭祥,章 煜
(中国电子科技集团公司第三十六研究所,浙江 嘉兴 314033)
0 引言
测向系统的测向精度是评估测向系统性能时的一个重要指标。传统测向精度的测试方案一般以测向系统为中心,在距离R的圆周上选取八个测试方位。发射点到接收点的距离R一般在10到15个波长以上(以3 MHz为例,就是1~1.5 km)。系统分别对每个测试点的信号进行测向,与实际方位进行比较,综合各个点位计算测向误差的均方根值,得到系统的测向精度指标[1]。
这种测向精度的测试方法原理比较简单,但实际实施起来却有一定的难度。主要是满足测试条件的场地环境比较难找,它要求周围无遮挡,尽量远离高压线、变压器、变电站、高大建筑物、大的金属广告牌、江河等可能造成干扰的环境因素,以尽可能保证信号的直线传播[2]。理想的情况是有一块田字形的大型空旷场地,测向系统布置在中心,装有电台的车辆沿着四边道路机动,然而在城市现代化高速发展的今天,要找到这样一块合适的测试场地并非易事。
另一种方案是建设一个高精度旋转平台,将测向系统放在旋转平台上测试。电台发射点一般固定在离旋转平台一定距离的位置上,测向系统在工作频段范围内进行测试。完成一组测试后,电台不需要移动,只需要控制平台转动一定的角度,就可以进行下一个方位角度的测试,这样每个方位的测试环境都是相同的,场地的建设可以无限接近标准场地的要求,测试结果受环境的影响很小。
相比于第一种方案,这种方案的优势是很明显的。但它的场地建设要求还是比较高的,其转台的角度旋转也需要有高精度的数控设备来控制,制造成本较高。也因此,即便建设起来测试场地,电台到转台之间的距离往往也比较有限,一般能达到100 m~200 m就非常不错了,对于超短波系统还行,但对于短波系统显然是远远不够的。专业的研究机构可能建设超短波系统的测试场或微波暗室来进行这方面的测试,但条件所限,一般对于100 MHz以下的测试暗室很难建设。而短波系统由于受天线尺寸和测试距离的限制,很难用这种方法测试。
综上,现有测向技术存在如下不足:
1)道路导致测试点无法到达,场地传输路线上有障碍物,影响信号的直线传播;
2)测试时电台和测向系统的配合,逐个频率的人工测试效率非常低下。
因此,寻找另一种简单易行高效的测试方法是非常必要的。
1 设计实现
仔细分析传统的测试方法,主要有两方面的问题。一个是没有道路测试点无法到达,或者场地传输路线上有障碍物,影响信号的直线传播。还有一个就是人工测试的低效问题。如果能解决好这两个问题,测向性能的测试问题基本也就解决了。
第一个问题最好的解决办法是不要用车辆来运输电台,而采用空中发射平台,既可以到达任何位置,又可以避开信号传输路线上的障碍物,保证信号沿直线传播。现代无人机技术的高速发展,多旋翼无人机的出现提供了一条解决这个问题的捷径。
多旋翼无人机相较于其它无人机具有得天独厚的优势,它具有可以垂直起降,可以定点盘旋、机械结构简单、安全性高、使用成本低等优点。机上大多配置有GPS/GLONASS/BD等定位和遥控装置,可以从地面很好地遥控飞行和滞空停留,其定位数据如经纬度坐标和高度都可以很方便地读取。
有了合适的平台,还需要解决电台的问题,普通的通信电台由于重量太大,不适合于安装在一般的民用多旋翼无人机平台上。为此可以设计一个小型的简易信标源,用于产生出符合要求的频率信号作为测试目标。其整体重量应严格控制,太大的重量会影响无人机的滞空时间。
第二个问题最好的解决办法是避免人工测试,而采用软件自动化测试方法。
信标源的远程遥控需要通信方式来保证,传统的通信方式往往需要两部电台来实现,其较大的体积和重量显然并不适合应用在本方案。信标源的控制可以采用4G无线网卡通信方式实现。在地面测向系统的微机终端和无人机载信标源上各装一个4G无线网卡,其体积重量非常小,内插SIM卡,在有4G手机网络信号的地方都可以实现无线通信。
然后编制一个自动化测试的软件,通过地面测向系统的微机终端软件同时控制信标源的信号发射和测向系统的方位测试,实现自动化测试,可以大大提高测向精度的测试效率。
这样,基于用升空多旋翼无人机作为信标源搭载平台,采用4G网络通信作为遥控方式的一种新的软件自动化测试方案就形成了,见图1。
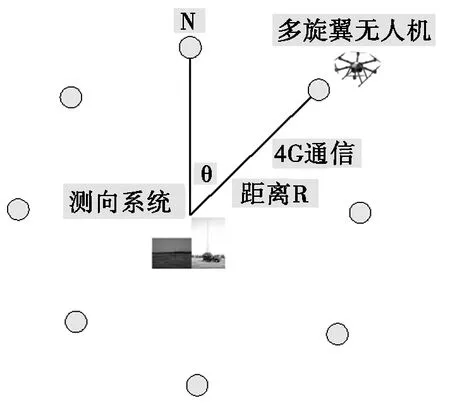
图1 多旋翼无人机平台测试布局示意图
2 具体实施方式
本方案给出了一种自动化测向测试方法,参考图2,该自动化测向测试方法包括如下步骤:
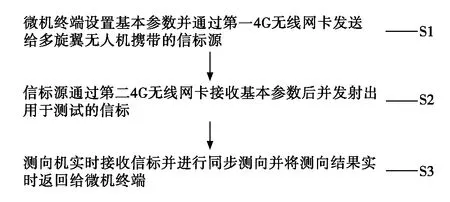
图2 测向系统自动化测试步骤
步骤一、微机终端设置基本参数并通过第一4G无线网卡发送给多旋翼无人机携带的信标源。
为了保证测向精度,本方案采用多旋翼无人机搭载的信标源,实现了空中发射平台,可以有效避开遮挡物,从而降低对周边环境的要求。
为了自由选取测向系统的工作频段范围,本方案通过微机终端(即地面终端)设置基本参数(包括测向的起始频率、频率步进、频率数量和信号驻留时间),并通过基本参数,对信标源产生的序列信号进行频率控制。
步骤二、信标源通过第二4G无线网卡接收基本参数后发射用于测试的信标。
对于500 MHz以下的信号,由信号产生器生成的信号经过滤波和适当衰减提纯后放大输出,可以得到不小于0 dBm的信标,供测试使用。
对于0.5 G~6 G以上频率较高的信号,由于频段太宽,需要分段处理,按照频率的高低设计了4路通道。每路通道分别设计了一个高通滤波器和一个低通滤波器,可以很好地解决信号的谐波干扰等问题,在频率最高那路,因为信号衰减厉害,需要多设计一个放大器进行平衡。最终可以得到不小于-3 dBm的信标,供测试使用。因此,本方案的信标包括大于0 dBm的第一信标和大于-3 dBm的第二信标,其整体重量可以控制在100 g以内。

图3 信标源的工作原理示意图
步骤三、测向机实时接收信标并进行同步测向并将测向结果实时返回给微机终端。
本方案通过控制频率点和方位的采样数,保证足够的样本数,以保证得到的测向精度越接近真实。
本方案中的信标源的控制,采用4G无线网卡实现。在地面测向系统的微机终端和无人机载信标源上各装一个4G无线网卡,其体积重量非常小,内插SIM卡,在有4G手机网络信号的地方都可以实现无线通信,非常的方便实用。
本方案的测试流程如图4所示:进入自动化测试界面后,首先设置好基本参数,如起始频率、频率步进、频率数量以生成信号的频率集,信号自动跳到下一个频率点的驻留时间。然后启动自动化测向,此时信标源生成序列信号并发射,而测向机同步进行测向,完成工作后每一个频率点的测向结果均会被自动记录。这个过程可以重复进行,必要时也可以修改基本参数后再行测试。
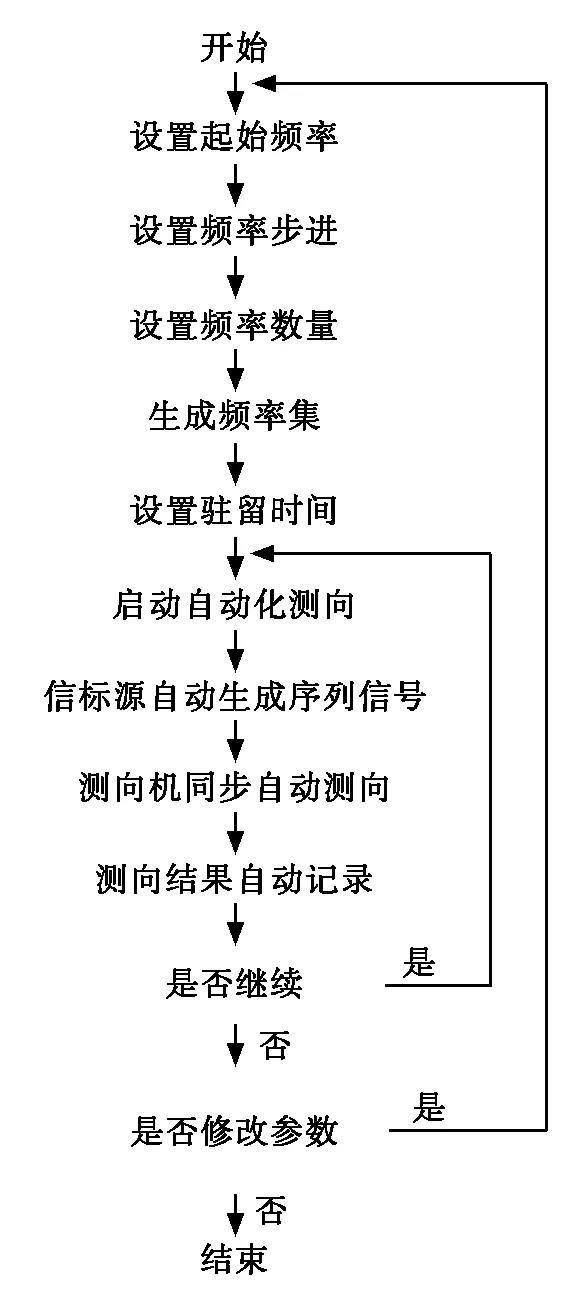
图4 自动化控制流程图
测试结果:系统测试完成后,其采集到的测向结果将自动保存到数据库中。也可将采集到的原始数据导入EXECL表中,可以很方便地得到一张系统测向误差的打点分布图。图5就是某套测向系统在某个方位工作在30 MHz~110 MHz频段的一次自动化测试数据实例,横轴为其工作频段,单位:MHz,纵轴为测向误差,单位:度。每0.5 MHz取一个采样点,一共160个采样数据。

图5 测向系统自动化测试数据实例
在实际工程应用中,可以对系统进行多方位测试,比如每2度进行一次测试,依据所有的测试结果造一张系统的校准表输入系统,测向系统性能可以得到大大提升!面对如此大的测试工作量,本方案的软件自动化测试在工作效率上面的优势就非常明显了。采用传统方法测试可能需要几天的工作量,在采用本自动化方法测试时可能仅需要几十分钟就可以完成。
3 结束语
采用多旋翼无人机搭载的信标源进行空中发射,既可以到达任何位置,又可以避开信号传输路线上的障碍物,保证了信号沿直线传播,避免了测试环境这个不确定因素;微机终端通过4G无线网卡通信控制信标源的信号发射和测向系统的方位测试,最终实现了测向系统的自动化测试,大大提高了测试效率。
