热风炉拱顶温度组合滑模控制策略
2022-06-24刘新成
袁 陈 刘新成
(西门子电机〔中国〕有限公司,江苏 扬州 251002)
拱顶温度是高炉热风炉燃烧控制过程中的重要控制变量之一,其升温速度对格子砖的热交换效率有直接影响,进而影响热风炉的蓄热量,最终影响送风温度的高低[1-2]。拱顶温度是一个大惯性、纯滞后的复杂被控对象,且在燃烧过程中与烟气温度存在耦合关系[3],在工程上运用传统PID方法控制拱顶温度难以取得较好的控制效果[4-5]。专家学者针对热风炉拱顶温度控制策略进行了深入研究。杜罗通等[6]提出一种DMC-PID串级热风炉拱顶温度控制策略,将拱顶温度作为主被控量,以燃料调节阀开度作为辅助控制量。该策略改善了拱顶温度的响应速度和抗干扰性能,但该控制策略参数不易及时作出调整,容易出现拱顶升温过慢、空气过剩等问题。刘丕亮等[7]提出一种热风炉燃烧PID参数自整定控制方法,利用对空气流量和煤气流量进行优化组合,实现拱顶温度的快速攀升,但该方法仅进行了离线PID参数的自整定,并未设计在线PID自整定控制器。崔桂梅等[8]提出了一种基于小波滤波的神经网络拱顶温度模型预测控制方法。在传统数据预处理的基础上,利用小波分析方法对温度数据进行滤波使残留噪声进一步减小,同时剔除了异常值,对建立热风炉拱顶温度神经网络数学模型起到了很好的支撑作用。仿真结果表明,拱顶温度模型,能够较为准确的预测拱顶温度及其变化趋势。为此,本文提出一种组合滑模控制策略,将趋近律引入到平移滑平面与旋转滑模面组合控制方法中,并通过反馈校正技术利用拱顶温度跟踪误差实时更正模型参数,抑制拱顶温度在调节过程中的超调和滑模抖振,同时设计了一种干扰附加控制方法,增强对外界干扰的抑制,从而达到有效提高拱顶温度控制系统抑制扰动能力的目的。
1 组合滑模变结构控制
1.1 组合滑模变结构控制策略
针对热风炉拱顶温度超调量大和模型参数易变问题,普通滑模变结构控制仅能确保系统状态在初始时刻和达到常规滑模面之后位于滑模面,而在趋近稳定过程中只位于滑模面附近[9-11]。此外,为保证控制系统的“鲁棒性”,常规滑模面都是以牺牲系统的趋近速度为代价,从而导致系统的稳定速度大为减缓。因此,为确保系统状态始终位于滑模面上,且较好地解决稳定速度和“鲁棒性”之间的矛盾,应采用组合滑模控制[12-13]。
高炉热风炉拱顶温度参数模型如下[14]:

式中:δ为外界扰动;A、B为热风炉参数;x为热风炉输入燃料量,y为输出拱顶温度。
假设拱顶温度的设定值为d,并且设定值与系统输出间的偏差为e,则有:

设滑模函数为s,根据平移滑模面和旋转滑模面的定义可知:

由式(2)可得:

将式(3)代入式(4)可得:

1.2 基于FFRLS的组合滑模变结构控制
为实现对拱顶温度滑模函数的控制,引人趋近律,设:

式中:IDI<1,K>0。
同时,为实现对外界扰动的抑制,从而假设外界扰动的上下界分别为FU和FL,且设:


由式(7)、(8)和(9)可对式(6)进行扰动附加控制,则新的拱顶温度控制方案为:
下面分别以sm(k)>0和sm(k)<0两种情况分析系统的准滑动模态。
当sm(k)>0、st(k)>0,则式(11)变为:
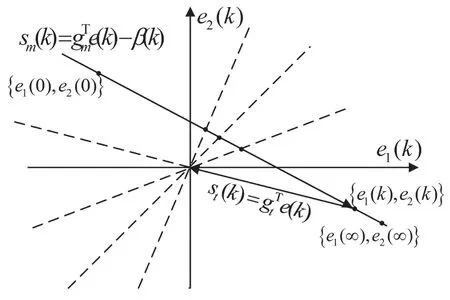
图1 组合滑模控制系统状态变化图
2 仿真分析
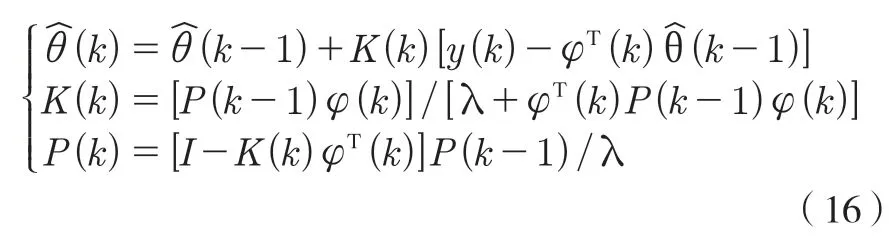
采用组合滑模控制策略可以在保证系统快速性的同时有效提高系统“鲁棒性”,但由于系统控制表达式中的参数、未知,因此仿真时需要引入FFRLS算法对热风炉输入输出数据进行辨识,从而求取最终控制参数[15]。对于高炉热风炉拱顶温度控制系统,由于现场干扰会造成系统参数时变,而FFRLS算法是在递推最小二乘法的基础上引入遗忘因子,具有辨识速度快和强大的非线性逼近能力,对参数时变系统具有很好的辨识效果[16]。其公式如下:
为保证辨识精度,引入如下性能指标函数:

式中:L为数据长度;η为遗忘因子,
将K值代入式(16),并考虑到β(k)的值在算法实现过程中保持不变,其值为常数,即:

则最终的拱顶温度控制律为:

式中:


图2 组合滑模控制结构图
为验证本文所提热风炉拱顶温度组合滑模控制策略的有效性,以宝武集团某炼铁厂2 060 m3高炉配套的4座热风炉为应用对象,拱顶温度设定值为1 200 ℃,采用FFRLS算法对热风炉拱顶温度模型参数进行辨识,运用本文设计的组合滑膜算法对热风炉拱顶温度进行控制,并与常规PID算法和滑模算法进行对比仿真,算法仿真如图3所示。为验证组合滑模控制策略在热风炉拱顶温度控制系统中的“鲁棒性”和抗干扰能力,在系统稳定运行900 s时加入幅值为20%阶跃干扰,比较组合滑模控制策略、常规滑模控制策略和PID控制策略的优劣性。
由图3可知,本文提出的组合滑模算法仅需120 s即可达到稳定状态,且超调量仅为4.9%。普通滑模算法和常规PID算法分别需要400 s和420 s才能达到稳定状态,且超调量分别为14.2%和16.6%。在算法运行900 s时加入15%的阶跃干扰模拟实际生产过程中的外界干扰,组合滑模算法仅需150 s即可重新达到稳定状态,且超调量仅为8.3%。普通滑模算法和常规PID算法分别需要250 s和300 s才能再次达到稳定状态,且超调量分别为13.1%和25%。由此可见,本文提出的组合滑模算法在热风炉拱顶温度的控制中表现良好。
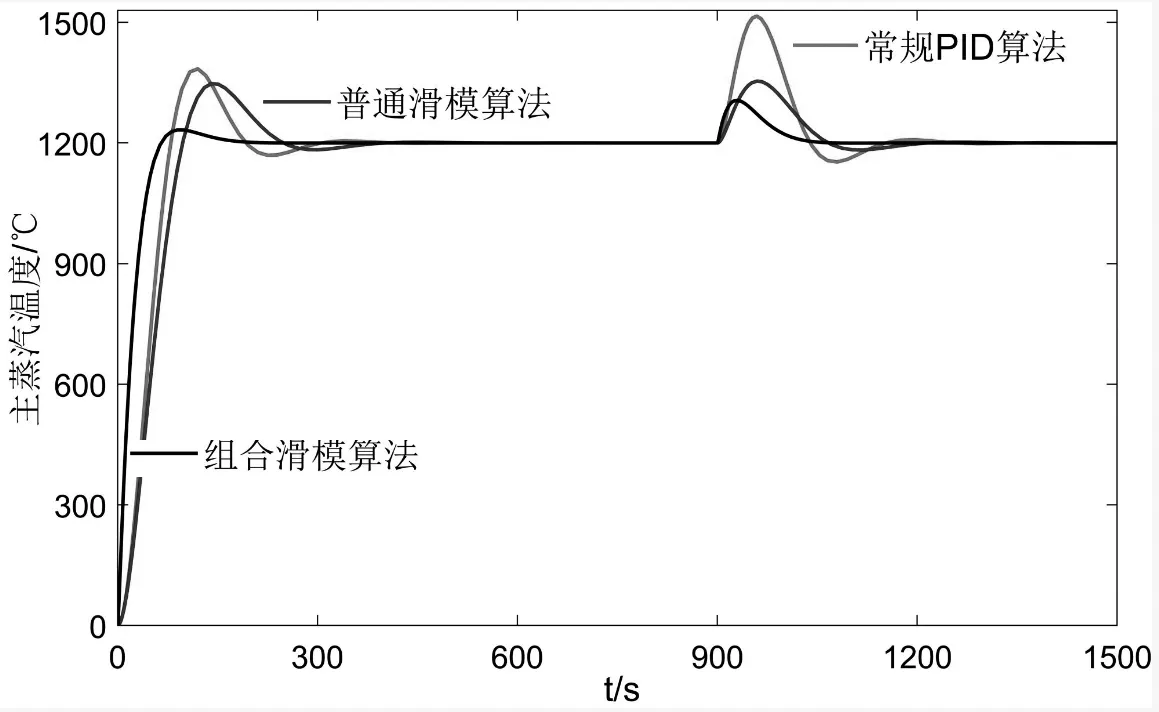
图3 三种控制策略仿真对比
为进一步验证组合滑模控制策略在现场工况发生变化时的控制效果,分别针对三种算法进行仿真实验,仿真结果如图4所示。
由图4可知,组合滑模控制策略、常规滑模控制策略和PID控制策略在工况第一次改变后的调节时间分别为40 s、110 s和120 s,超调量分别为0%、0%和2.1%;在工况第二次改变后的调节时间分别为50 s、155 s和170 s,超调量分别为0%、1.5%和5%。由此可见,组合滑模控制策略拥有更优越的动态响应能力,“鲁棒性”更强,受现场工况变化影响更小。

图4 拱顶温度负荷变化仿真
3 工程应用
为验证组合滑模控制策略的控制有效性,以宝武集团某炼铁厂2 060 m3高炉配套的4座热风炉为对象进行工程应用。在不改变原DCS系统硬件配置和结构的前提下,增加一套由监控计算机和拱顶温度优化控制器组成的热风炉拱顶温度优化控制系统。监控计算机与优化控制器之间采用OPC协议并通过工业以太网进行数据通信,而现有PLC系统操作员站与优化控制系统则通过OPC协议进行信息传输和连接。系统之间具体架构如图5所示。

图5 拱顶温度优化控制架构
图6和图7是在热风炉额定负荷下连续16 h分别采用常规滑模控制和组合滑模控制的拱顶温度实时曲线,拱顶温度设定值为1 200 ℃,监测时间为8 h。
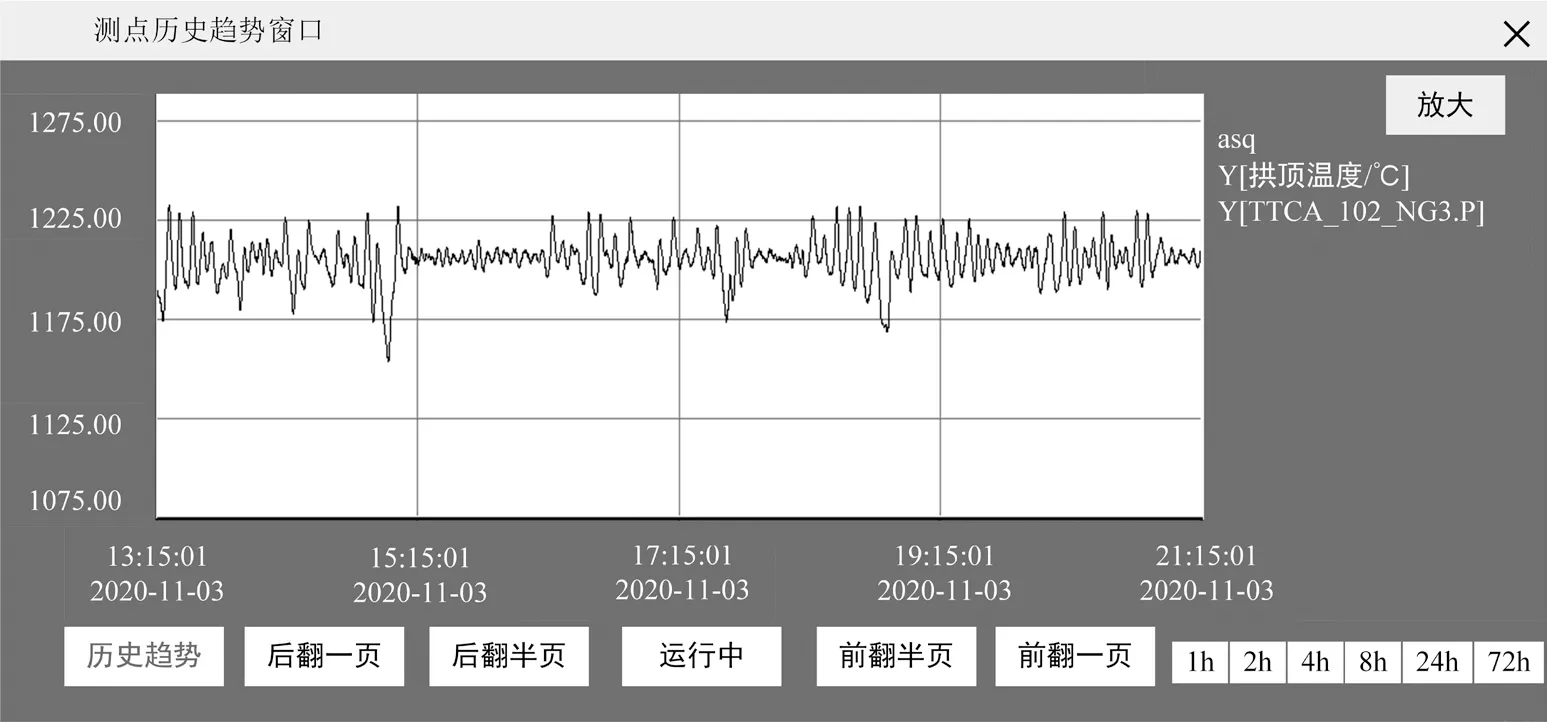
图6 投运前拱顶温度趋势图
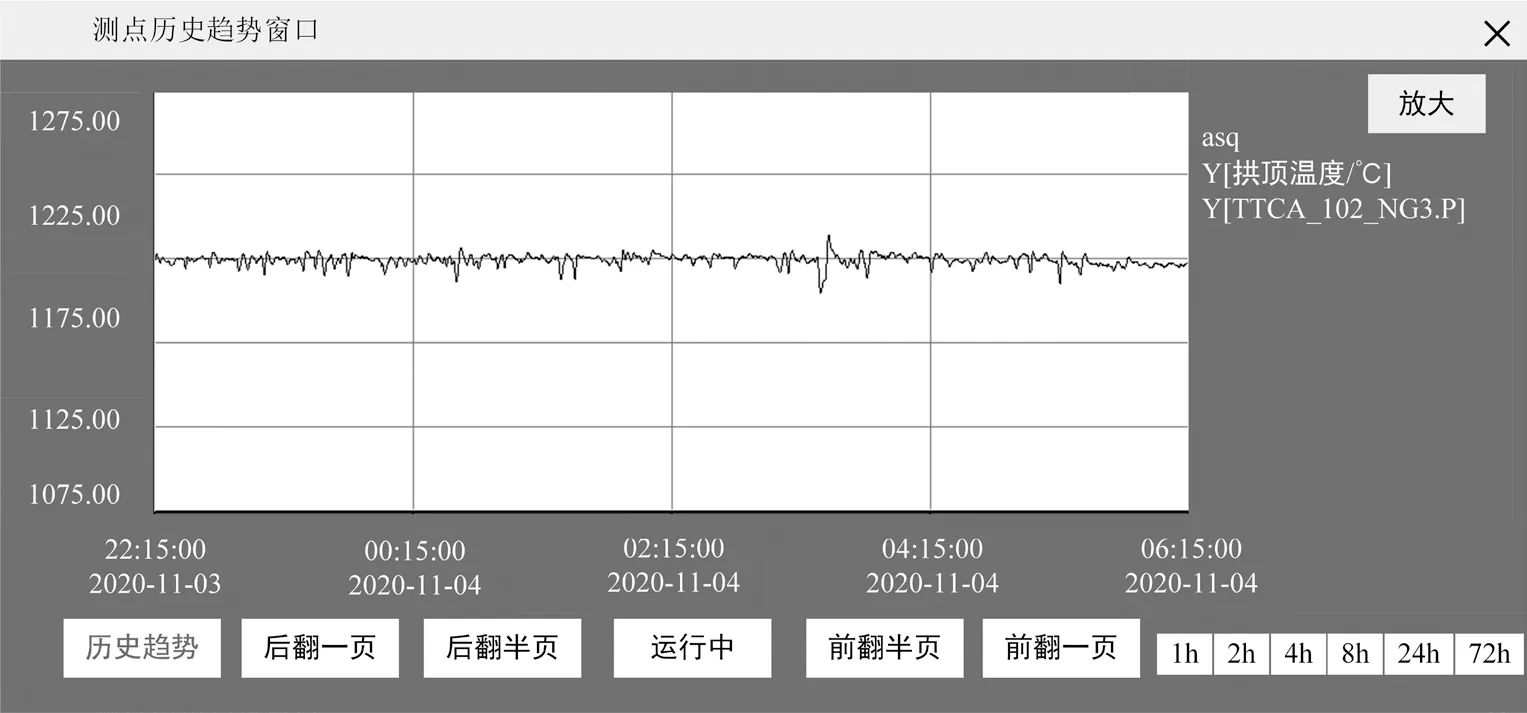
图7 投运后拱顶温度趋势图
通过对比两种控制策略下的曲线图可知,采用常规滑模控制时拱顶温度在1 155 ℃~1 230 ℃间波动,这是由于常规滑模控制系统无法及时抑制因换炉、负荷升降、煤气压力波动等带来的拱顶温度变化;而采用组合滑模控制时拱顶温度仅在1 190 ℃~1 207 ℃之间波动,拱顶温度波动范围较小,且变化较为平缓。由上述分析可知,通过采用组合滑模控制,系统抖振较传统滑模控制拱顶温度降低了70%,且热风炉拱顶温度实时曲线没有出现明显的波峰和波谷,曲线整体走势较为平缓,拱顶温度控制系统的抗干扰能力和总体稳定性得到显著提升。
4 结论
热风炉拱顶温度控制系统具有纯滞后、大惯性等特点,且在热风炉运行过程中容易受到换炉等外界扰动因素影响,导致拱顶温度频繁波动。鉴于常规PID控制策略不能很好地对拱顶温度进行控制,本文提出了一种基于组合滑模控制的热风炉拱顶温度控制策略,并利用Matlab软件对该策略进行仿真验证。仿真结果表明,该控制策略对拱顶温度的超调量、调节时间等动态性能指标有较好的控制效果。将本文提出的控制策略应用于宝武集团某炼铁厂2 060 m3高炉配套的4座热风炉上,拱顶温度控制偏差在±10 ℃以内,有效提高了高炉热风炉拱顶温度控制系统的抗干扰性和稳定性。
