改进的强地杂波环境下车辆目标鉴别方法
2022-06-22蔚宏轩于祥祯王树文
蔚宏轩, 蔡 猛, 于祥祯, 王树文
(上海无线电设备研究所,上海 201109)
0 引言
合成孔径雷达(synthetic aperture radar,SAR)能够全天时、全天候地对目标进行主动高分辨成像,可以提供丰富的目标信息[1]。SAR图像车辆目标鉴别作为SAR图像车辆目标检测的后续处理步骤,主要任务是在保留目标区域的同时,尽可能地剔除杂波,进而降低后续不同种类车辆目标鉴别的计算复杂度[2]。
复杂地物背景下较小尺寸车辆目标的检测和鉴别始终是SAR图像目标鉴别研究领域的热点和难点[3]。SAR图像车辆目标鉴别首先需要进行目标检测,通常根据SAR图像背景中的地物杂波统计模型,采用相应的恒虚警率(constant false alarm rate,CFAR)检测算法实现。目前常用的CFAR算法主要包括单元平均恒虚警率(cell average CFAR,CA-CFAR)算法,基于CA-CFAR算法改进得到的单元平均选大恒虚警率(greatest of CFAR,GO-CFAR)算法和单元平均选小恒虚警率(smallest of CFAR,SO-CFAR)算法,基于统计排序的类恒虚警率(order statistics CFAR,OS-CFAR)算法,以及开关型恒虚警率(switching CFAR,S-CFAR)算法[4]等。但由于CFAR检测是一种次优的异常检测算法[5],通常情况下SAR图像场景中地物组成较为复杂,会导致检测结果受到杂波干扰而产生虚警,且虚警目标的数量与面积占比很可能远大于潜在车辆目标的数量与面积占比,因此在目标鉴别阶段需要结合目标感兴趣区域(region of interest,ROI)的纹理特征,即ROI内目标像素散射强度的起伏,进行预筛选,完成杂波虚警抑制,提高目标鉴别性能与效率。
特征提取与选择是影响SAR图像目标鉴别性能的重要因素[6]。NOVAK等[7]提取机动目标二值化图像的Hausdorff分形维数作为目标鉴别的候选特征,并设定车辆目标的Hausdorff维数小于自然地物。但是由于Hausdorff维数未考虑目标像素散射强度的起伏特性以及像素的空间分布,无法描述场景中目标像素散射起伏的快慢,因此将Hausdorff维数作为一种车辆目标鉴别的特征将导致较高的虚警率。另外SAR图像受相干斑噪声影响,会产生更高的虚警率,需要采用鲁棒性更好的分形特征提高目标检测和鉴别性能。国内部分学者将另一种高阶分形特征——间隙度特征引入到SAR图像车辆目标鉴别中[8-10]。该特征可定量描述SAR图像中目标像素散射起伏的剧烈程度,以及车辆目标与地物背景的间隙尺寸,弥补Hausdorff维数等分形特征的不足。但文献[10]仅应用了ROI切片中区域目标像素散射强度的方差作为车辆目标间隙度特征的影响变量,当车辆目标不在切片中心时,将导致间隙度特征产生剧烈波动,与地物杂波特征混淆。
本文针对强地杂波背景下SAR图像的车辆目标鉴别,提出了一种基于变化检测量阈值分割和二维像素间隙度特征的车辆目标鉴别方法,并对装甲车、卡车、坦克等不同车辆的SAR图像数据进行仿真,验证目标鉴别算法的有效性。
1 强地杂波下SAR图像中车辆目标鉴别
1.1 目标鉴别算法流程
针对现有特征提取与选择方法在SAR图像车辆目标鉴别过程中存在的不足,应用像素散射强度变化特征对SAR场景中的潜在车辆目标的鉴别可信度进行排序,并以杂波区域的鉴别可信度作为参照。由于SAR图像不同区域像素的灰度存在差异,根据SAR图像灰度对场景进行闭运算处理,可以有效区分不同散射强度的目标区域和杂波区域。目标由于其材料、结构等因素,能更有效地反射SAR电磁波,在SAR图像中表现为灰度较大的亮区域;而杂波对于SAR电磁波主要为漫反射,在SAR图像中表现为灰度较小的暗区域。因此对于每一幅SAR图像都存在一个阈值,可用于目标区域与杂波区域的区分。
本文所提的目标鉴别算法流程如图1所示。首先根据输入SAR图像中像素的灰度分布,选取适当的参考图像与平移图像,对整幅图像进行自适应阈值提取,并根据阈值求取结果对图像进行基于变化检测量的二值化筛选,剔除因杂波导致的虚警目标;再提取筛选后二值图像中的1连通域作为ROI切片,根据像素散射强度的起伏变化与分布特征,计算ROI切片中的二维像素间隙度特征向量;最后应用该向量计算ROI切片的目标鉴别可信度并排序,实现车辆目标鉴别。
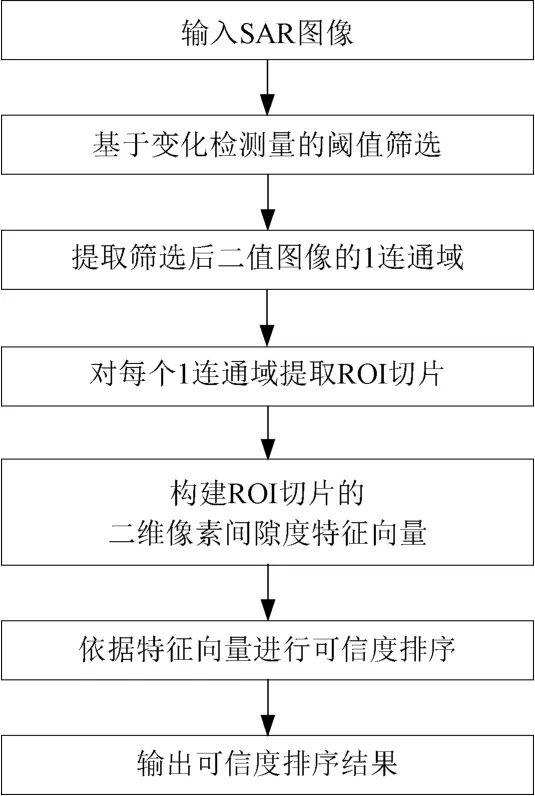
图1 目标鉴别算法流程图
1.2 基于变化检测量的像素阈值提取
从SAR图像目标场景中提取ROI切片,首先要得到车辆目标的概略位置。应用阈值分割方法可以生成切片的二值图像,区分背景杂波与车辆目标。在本文中用到的基于变化检测量的阈值分割方法原理是:首先利用SAR图像灰度数据构建变化检测量,生成标准灰度差异图像;再利用标准灰度差异图像的直方图特征计算出标准灰度差异图像中变化与未变化像素的阈值;最后利用该阈值来确定车辆目标预筛选的最终阈值,实现对SAR图像车辆目标的预筛选。
提取像素灰度阈值时,首先在ROI切片四周建立隔离区,并将ROI中心块作为参考图像。将参考图像分别向左上、左下、右上、右下4个方向平移,平移距离不超过隔离区宽度,得到4幅平移图像。计算第k幅参考图像像素灰度的似然比变化检测量
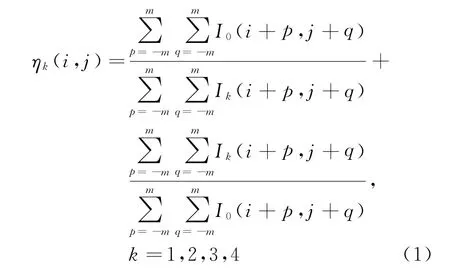
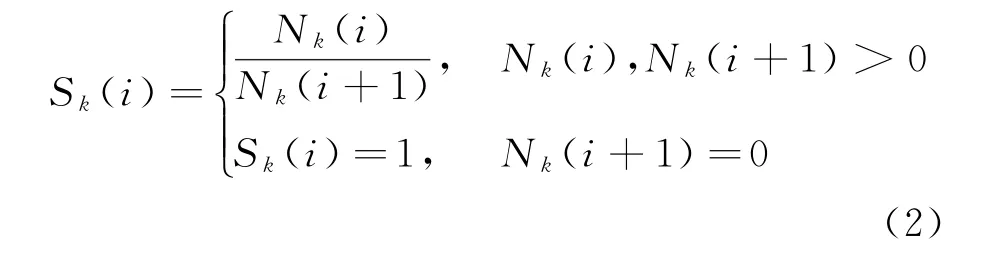
式中:i,j为图像的像素坐标;m=(M-1)/2为杂波区域宽度,其中M为对每一个像素计算似然比变化检测量的窗口的大小;I0(·)为参考图像的像素灰度;Ik(·)为第k幅平移图像的像素灰度。将像素灰度似然比变化检测量线性变换至区间[0,255],得到第k幅标准灰度差异图像Dk,并绘制其像素灰度直方图。Tk_max表示出现次数最多的像素灰度值,在直方图上统计 [Tk_max,255]区间每个灰度值的数目Nk(i),其中i为灰度值编号。计算区间[Tk_max,255]内相邻灰度值数目的比值Sk(i),并将第一个满足Sk(i)<1的像素所对应的灰度值作为初始像素灰度阈值Tk_0。Sk(i)的计算公式为
统计灰度值在区间[Tk_0,255]内的像素数目,即第k幅标准灰度差异图像Dk中发生变化的像素数目Ck_ch。
在原始切片的直方图中从灰度值255开始向下搜索,当下降到某一灰度值Gk_0时,若区间[Gk_0,255]内所有像素数目Ck_whole满足Ck_whole>Ck_ch,则认为第k幅标准灰度差异图像的预筛选阈值Tk=Gk_0。
根据4幅标准差异图像即可得到最终阈值

式中:round(·)表示向下取整函数,即当阈值计算结果含小数时,舍去小数部分。
用最终阈值T对每一幅切片的像素进行预筛选,灰度值大于最终阈值T的像素赋值为1,否则为0,得到对应二值图像。在二值图像中赋值为1的像素即判定为车辆目标。由于在切片中车辆目标位于中心位置,因此根据二值图像得到车辆目标在切片中的边界,并对目标图像按分辨率抽取,以提升后续处理的计算效率。
1.3 构建二维像素间隙度特征向量
车辆目标具有明显的几何结构,包括近似为多边形的边缘轮廓和目标内部的箱式结构。因此在车辆目标像素集合的边界区域,像素散射强度有剧烈的起伏波动,并与背景地物区域存在明显的不同。目标区域像素的散射强度起伏特性和间隙度可以用分形理论来定量描述。间隙度表示ROI切片中不同区域之间的像素灰度值差异。与阈值分割的原理类似,从图像的灰度直方图中可以看出不同区域的灰度分布区间之间存在一定的间隙,基于此定义即可得到间隙度特征向量。文献[8]提出了一种高维分层间隙度特征的提取与计算方法,采用该方法对车辆目标切片进行特征提取,分层方法如图2所示。取待检测车辆目标SAR图像ROI切片,切片图像大小是边长为奇数个像素点的正方形。将切片最中间的一个像素点作为第一层,向外以一个像素宽度进行扩展,并取前3层为像素集C1,其后每层为一个像素集,依次记为C2,C3,C4。在计算高维分层间隙度特征时,取中间3层的像素点灰度值的方差作为第一个变量,从第4层开始每一层的像素点方差作为下一个变量。当车辆目标切片有N层时,其像素点方差组成一个1×(N-2)维的向量。
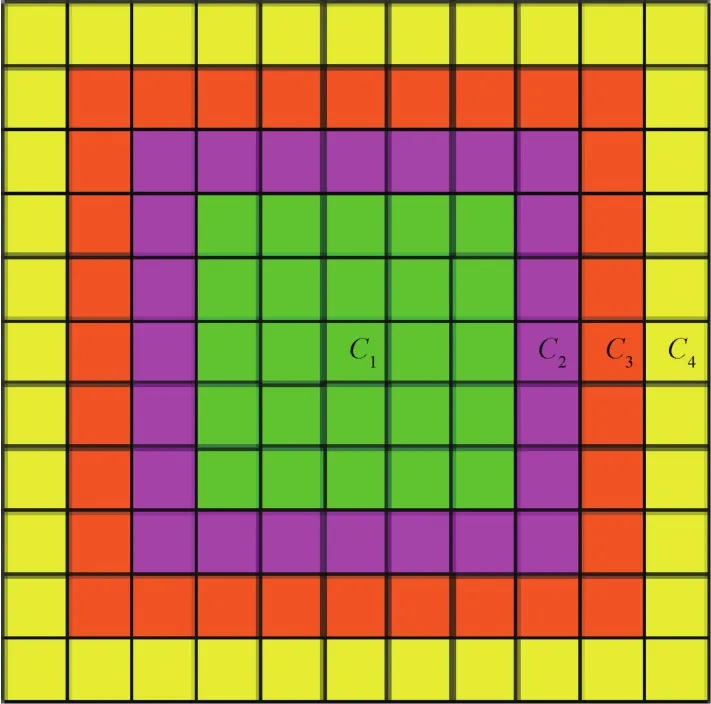
图2 文献[8]的切片图像分层示意图
上述特征构建方法在SAR图像本身杂波干扰少、车辆目标相较于背景杂波易区分的情况下,能够准确地对车辆目标切片进行特征提取和构建。但是若SAR图像中地杂波干扰较强,将无法正常提取目标切片特征。由于车辆目标经过预筛选后在SAR图像中所占像素点个数有限,通常为10×10个左右,这将导致按照现有分层方法得到的特征向量长度偏短,难以有效反映出切片中像素灰度的分布情况。同时,由于仅计算像素层灰度的方差,在强杂波环境下若由于成像角度原因导致灰度值未能反映出全部目标散射能量,方差的变化趋势将无法直观地反映出切片中车辆目标的灰度分布。
本文提出一种参考差分盒维法[10](differential box-counting,DBC)的方环扩散分层方法,将车辆目标切片中心的4个像素记为第一层,然后由中心向四周扩散分层,每一层宽度为一个像素,每一层像素的集合分别表示为C1,C2,…,CM,其中M=W/2表示切片所能分出的最大层级,W表示切片边长。取M=5,改进的切片图像分层示意如图3所示。
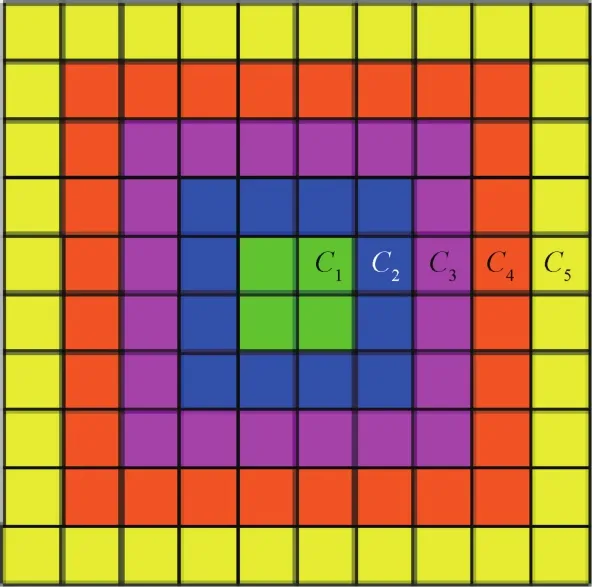
图3 改进的切片图像分层示意图
设SAR图像车辆目标二维像素间隙度特征向量
式中:H1与H2分别为H的均值子向量与方差子向量;h1j,h2j分别为H1,H2的第j维特征值;Cj为第j层像素集合;mean(·)为求均值函数;var(·)为求方差函数。
与高维分层间隙度特征相比,本文提出的二维像素间隙度特征的优点在于,二维像素间隙度特征向量包含目标切片每一层中像素的均值和方差信息,反映了该切片从中心到四周像素散射强度的变化趋势。通过更合理的分层方式,用较少的像素点层数即可以避免像素过少导致的误差。同时在强杂波环境下也可以避免由于筛选后车辆目标像素点数量偏少,导致车辆目标不位于中心圈的情况。而在特征向量中引入方差,也可以使得特征向量更贴近于车辆目标切片中像素本身的散射强度。在强杂波环境下,由于干扰较多,可能导致相邻层像素灰度值的变化趋势差异不够明显,通过计算从内至外相邻像素集的灰度变化梯度,难以精确地反映出车辆目标切片的区域组成。而由于车辆目标区域像素点灰度较大,背景杂波区域灰度通常较小,通过计算每一层灰度的均值与方差,能够更精确地贴合每一层中像素点的构成。
1.4 车辆目标鉴别可信度排序
车辆目标鉴别可信度排序是基于赋范线性空间的目标相似性排序。对于车辆目标切片,可用由内向外方环扩散分层法得到二维像素间隙度特征变化规律。特征向量的第一行为每层像素散射强度的均值,由内至外应逐渐变小并趋于稳定(当车辆目标不在切片中心时,由内至外均值应为先变大再变小)。特征向量的第二行为每层像素散射强度的方差,由内至外应由小变大,再变小并趋于平缓。而且特征向量的变化转折点与目标尺寸相关,特征向量的极值区域出现在目标的最小外接矩形两边长像素点个数作为区间的范围内。目标切片的后向散射强度起伏较大,具有特定尺寸且大小有限;地物背景切片的后向散射强度起伏较小,并且没有特定尺寸。即使地物背景局部由于其结构突变而形成二面角或三面角等强散射点,也因数量较少且分布稀疏,不会改变地物背景整体统计分布特征[8]。因此其二维像素间隙度特征将随机变化,没有特定的变化规律。依据本文提出的改进的二维像素间隙度特征的变化规律,即能对SAR场景中潜在车辆目标的ROI切片进行鉴别,并通过训练集目标的二维像素间隙度特征进行相似性距离度量,完成潜在车辆目标的鉴别可信度排序。
2 仿真实验及结果分析
2.1 仿真条件
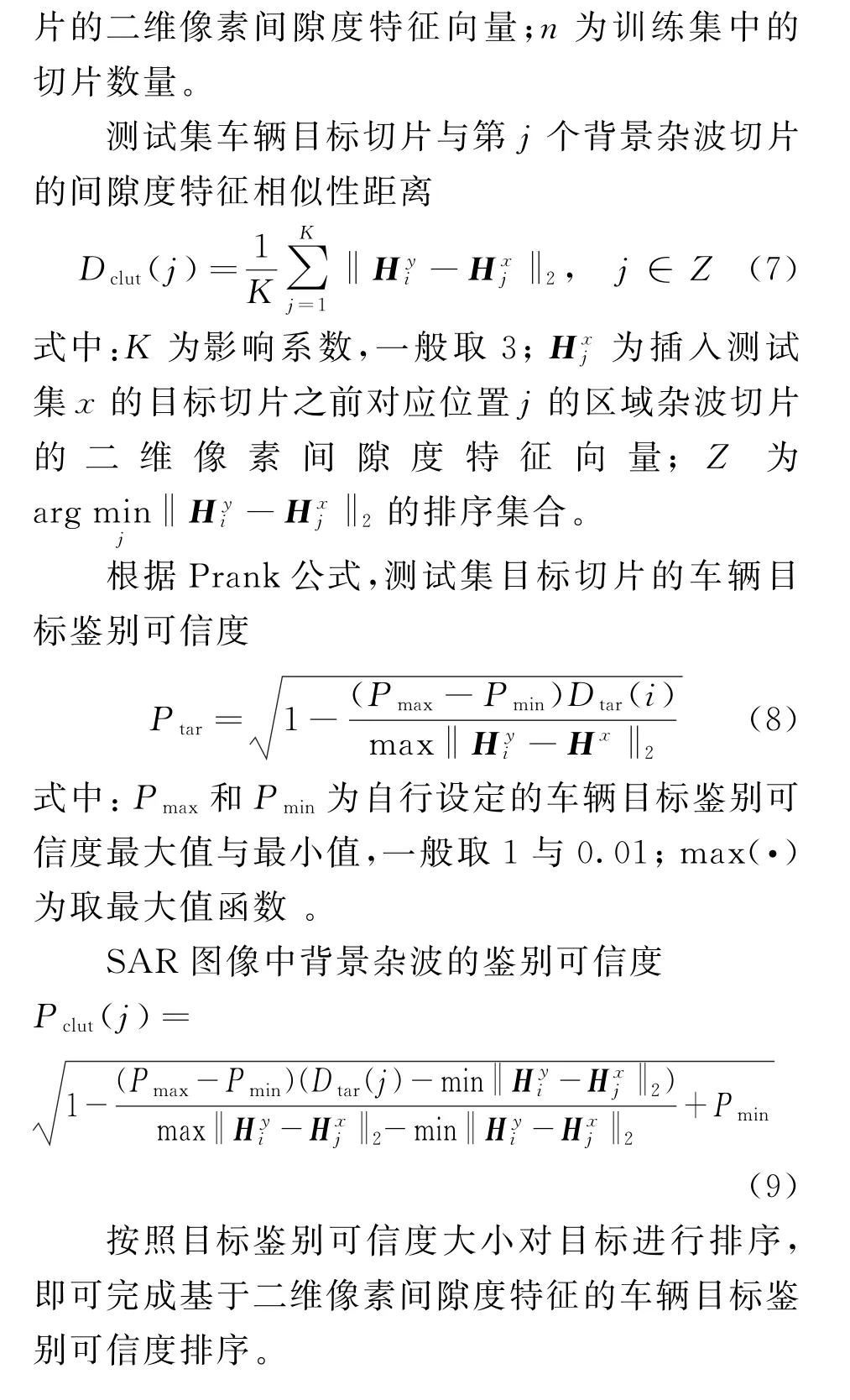
利用机动监视与目标搜索雷达(mobile surveillance and target acquisition radar,MSTAR)公开的装甲车(BMP2)、卡车(D7)、主战坦克(T72)等数据集进行仿真实验。3类目标的SAR图像切片示例如图3所示。数据集中的SAR图像分辨率为0.3 m×0.3 m,装甲车和主战坦克图像切片尺寸均为128×128个像素,卡车图像切片尺寸为177×178个像素。实验选取X波段、HH极化、波束擦地角15°的雷达聚束模式成像数据。在3类车辆目标图像轴向角0°~360°范围内,每隔2°取一个切片,选取3类目标各180个切片作为训练集,各选10个切片作为测试集。
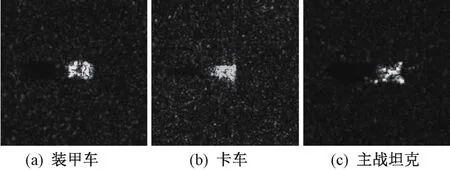
图3 3类目标的SAR图像切片
本文利用外场挂飞得到的SAR图像模拟实验场景进行仿真实验。主要场景类别包括:a)丘陵地貌或戈壁滩(典型场景类型为训练场或雷达阵地);b)含有一定人造设施痕迹的开阔地带(典型场景类型为机场)。将3类车辆目标切片按照编队的模式插入场景SAR图像中,即可构建典型场景模型。一般情况下编队车辆目标为3辆~6辆。
2.2 自适应阈值分割
以对典型场景进行数字仿真得到的训练场景中的2辆BMP2,2辆D7,2辆T72目标编队为例。假设车辆目标的质心与切片中心重合,先取切片中心区域的48×48个像素作为新切片,基于变化检测量的阈值提取方法对训练集数据、车辆目标测试集数据与杂波区域数据进行阈值计算与二值分类。计算出所有切片二值图像中车辆目标的上下左右边界,将所有原始切片按照边界值进行剪裁,完成预筛选。基于变化检测量阈值的特征提取方法,预筛选处理前后车辆目标典型场景如图4所示。可以看出,预筛选后,车辆目标得以保留,没有出现漏警或虚警等情况。可知,本文提出的阈值分割法在强地杂波环境下对3种车辆目标均能够实现较好的分割效果。
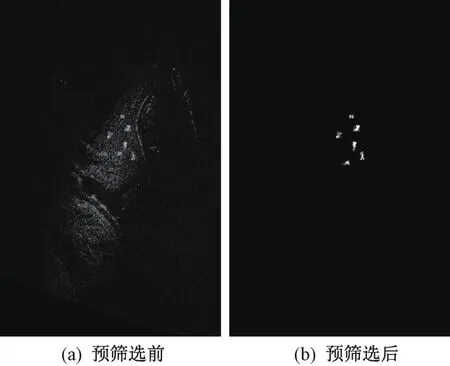
图4 预筛选前后车辆目标典型场景图
2.3 实验结果分析
由于SAR场景的分辨率为1.2 m×1.2 m,而车辆目标切片的分辨率为0.3 m×0.3 m,根据自适应阈值分割得到的结果对所有切片(训练集、测试集、杂波)进行抽取,得到分辨率为1.2 m×1.2 m的切片,此时车辆目标切片尺寸为12×12个像素。根据二维像素间隙度特征的提取方法,12×12个像素的切片可以分为6层,生成2行6列的二维像素间隙度特征向量;而对于一个15×15个像素的切片,采用高维分层间隙度特征也只能生成一个1行6列的向量,此时的切片仅采用均值反映切片中的区域变化,无法全面地描述切片中每一层像素的组成与变化趋势,容易出现误差。取信噪比为(5~8)dB的SAR图像,分别应用二维像素间隙度特征向量和高维分层特征间隙度特征向量对车辆目标鉴别可信度进行排序求解。当测试集分别为对应3种车辆目标的ROI切片时,3种车辆目标为训练集的目标鉴别可信度结果如图5所示。可以明显看出,当SAR图像本身的信噪比较低时,采用本文提出的改进的分层方法和二维像素间隙度特征向量提取方法,得到的目标鉴别可信度提升了3%~8%;对于每一类待检测车辆目标,以其同种车辆目标数据作为训练集时,即使场景中地杂波较强,仍然能够得到理想的鉴别结果。当采用另外两种车辆目标作为验证类型时,同样可以得到相同的实验结果。
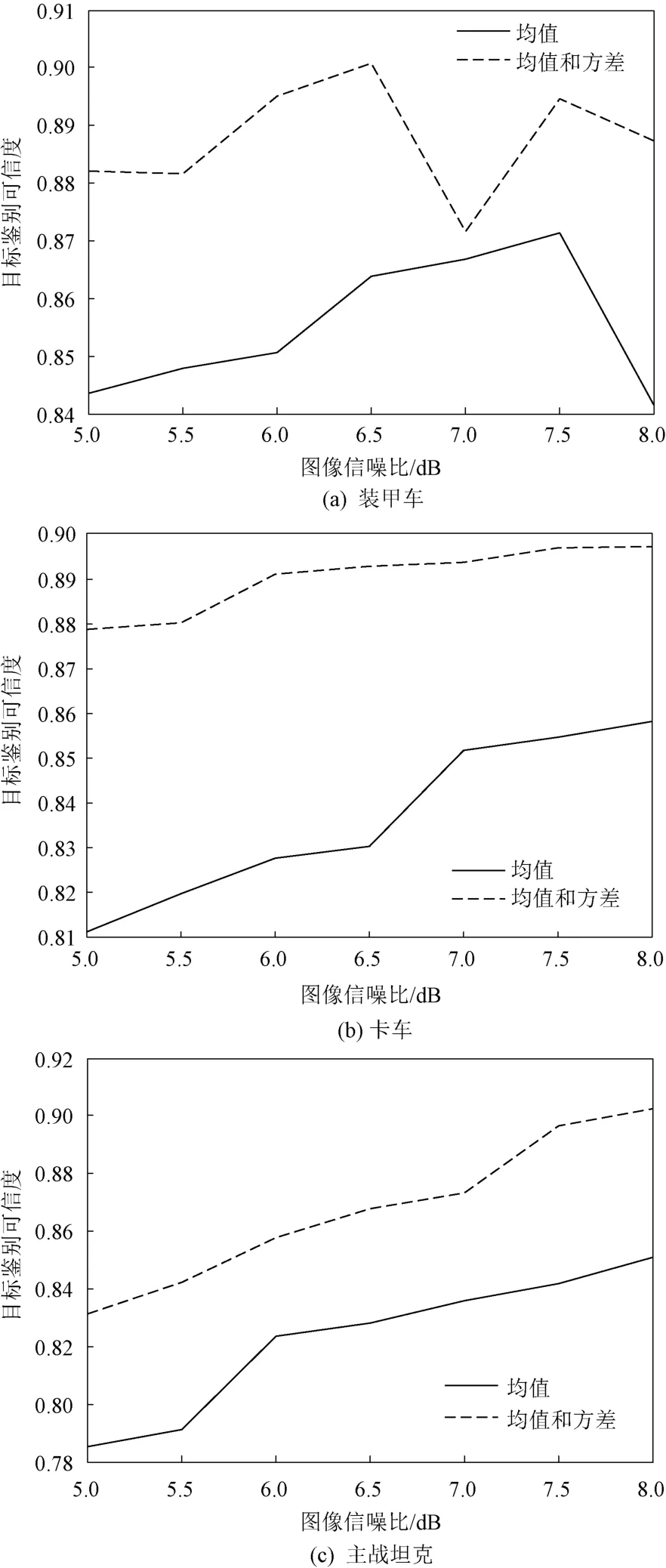
图5 3种车辆目标鉴别可信度对比
3 结论
在强杂波背景环境中,SAR图像中车辆目标的周围存在大面积的杂波区域,采用自适应阈值筛选并不能在ROI切片中完整保留车辆目标。因此为了使特征向量尽可能多地反映车辆目标切片的灰度值分布情况,本文提出了一种改进的适应强地杂波环境的车辆目标鉴别方法,在不牺牲特征向量对切片区域组成的反映能力的前提下,保证每一次仿真实验时车辆目标都能出现在切片中。对比仿真实验证明了在强杂波环境下本文提出的方法对同种车辆目标的鉴别可信度稳定在96%以上。但是由于不同车辆目标在几何特征上差异较小,以异种车辆目标作为训练集时,算法会存在误将不同的车辆目标检出,即无法有效识别车辆目标类型的问题。后续可以根据更精细的特征选取与计算,实现多种类车辆目标相互之间的稳定区分。