基于BP-AdaBoost模型的雷达工作状态识别方法
2022-06-22陆满君张文旭胡建波
秦 涛, 陆满君, 张文旭, 胡建波
(1.哈尔滨工程大学信息与通信工程学院,黑龙江 哈尔滨 150001;2.上海无线电设备研究所,上海 201109;3.中国人民解放军91411部队,辽宁 大连 116041)
0 引言
在军事领域愈来愈看重作战信息的背景下,雷达技术迎来了关键性发展阶段。其中多功能雷达以其功能灵活多变、状态切换敏捷的特点获得了广泛关注。在电子战双方均缺乏足够有效作战信息的大背景下,侦察机截获雷达辐射源信号,提取信号特征参数,对其加以分析,可以挖掘出辐射源对应的雷达型号及工作模式,为评估战争态势、调整作战策略提供重要技术保障。
雷达工作状态识别与模式分类有着紧密的联系。贾朝文等提出通过扫描幅度,判别雷达是相扫雷达还是机扫雷达,再利用脉冲描述字构建相干处理间隔(coherent processing interval,CPI)矩阵进行特征关联,进一步判断雷达威胁等级,对雷达工作状态进行识别。陈卓对相控阵雷达的各个子模块进行了系统性建模,通过研究基于天线扫描幅度的值特征,对雷达不同工作状态进行识别。李辉在对机载相控阵雷达重点子模块建模过程中,构建目标与雷达的典型运动场景,对接收的全脉冲数据进行多层次建模,利用去噪自动编码器对雷达工作模式进行识别。方佳璐对降噪分选后的雷达辐射源信号进行窗口划分,基于窗口序列实现对雷达工作模式的动态识别。ARIK等提出了一种智能认知模型,利用聚类算法对辐射源信号的脉冲描述字进行识别,进而通过人工神经网络(artificial neural network,ANN)生成干扰策略。除此之外,反向传播神经网络(back propagation neural network,BPNN)、概率神经网络(probabilistic neural network,PNN)等同样被广泛应用于雷达工作状态识别。
如何利用已有的算法得到更好的状态识别效果,集成学习是一种思路。集成学习属于机器学习领域,核心思想是将已有算法组装结合。常见的集成学习方法包括Bagging、Boosting以及Stacking等方法。王艳丽将并行Boosting算法与神经网络结合,降低学习的计算复杂度。仿真结果表明该方法能够大幅提高弱分类器算法的识别率。孙艺聪等利用Bagging算法并行训练若干卷积神经网络,并将它们融合起来对雷达信号的模糊函数特征进行分类识别。仿真结果表明,该方法在信噪比-2 dB时识别率达到85%,对低信噪比条件下的雷达辐射信号适应性较强。蒋雅萍在分布式环境下将集成思想中的Stacking算法与逻辑斯谛回归模型进行关联融合,进一步提取雷达辐射源信号中的特征,对4种工作状态进行了有效识别。侯超将支持向量机(support vector machine,SVM)算法与AdaBoost算法相结合,提出AdaBoost-SVM融合算法,对多种信噪比条件下的雷达辐射源信号数据集进行了测试,得到了最优的模式识别模型。
另一方面,雷达状态的识别率还受到特征参数重叠的影响。上述文献均未解决这一问题。本文采用AdaBoost算法对BPNN进行集成,以改善因雷达信号参数重叠造成的识别率下降问题。
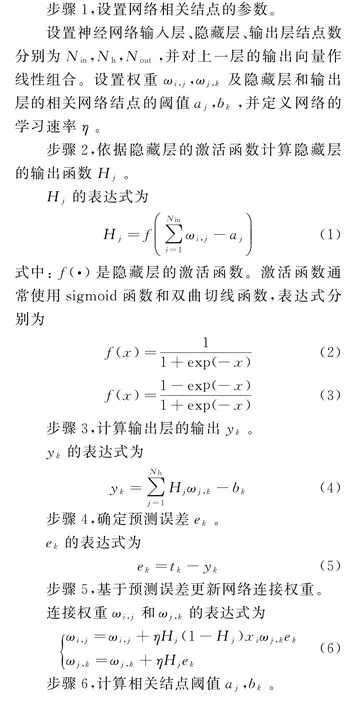
1 BPNN
BPNN包含信号的正向传播过程和误差的反向传播过程,是一种多层前馈网络。正向传播过程就是信号从输入层逐层传递到输出层的过程,最后一层输出值作为算法预测值,层与层之间的神经元互不影响。此外,为了取得最优参数组合从而得到期望输出,BPNN会训练和更新神经元之间的连接权重和阈值,逐层更新参数,以便不断向期望输出靠近。该更新权重和阈值的过程即为反向传播过程。实际上,导数链式法则贯穿于反向传播过程中,依据损失函数对各参数的梯度来进行参数的更新。反向传播的输入可以看作是BPNN预测值与实际值的误差,反向传播的输出是更新后的参数。BPNN的拓扑结构如图1所示。
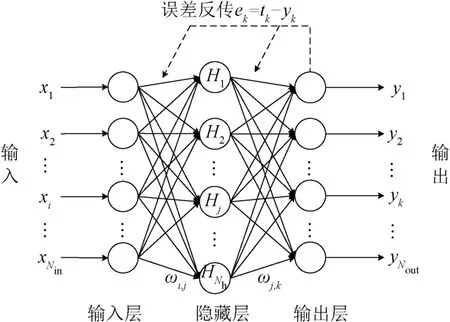
图1 BPNN结构示意图
图1中,BPNN只包含一个隐藏层,输入层、隐藏层和输出层的神经元数量分别为,和。,,…,x,…,x表示输入层的输入,,,…,H,…,H表示隐藏层的输出,,,…,y,…,y表示输出层的输出。输入层、隐藏层和输出层的神经元编号分别为1,2,…,,1,2,…,,1,2,…,。ω,是输入层第个结点到隐藏层第个结点的连接权重,ω是隐藏层第个结点到输出层第个结点的连接权重,t是BPNN输出层第个结点的期望输出,e=t-y是网络预测误差。BPNN的训练步骤如下。

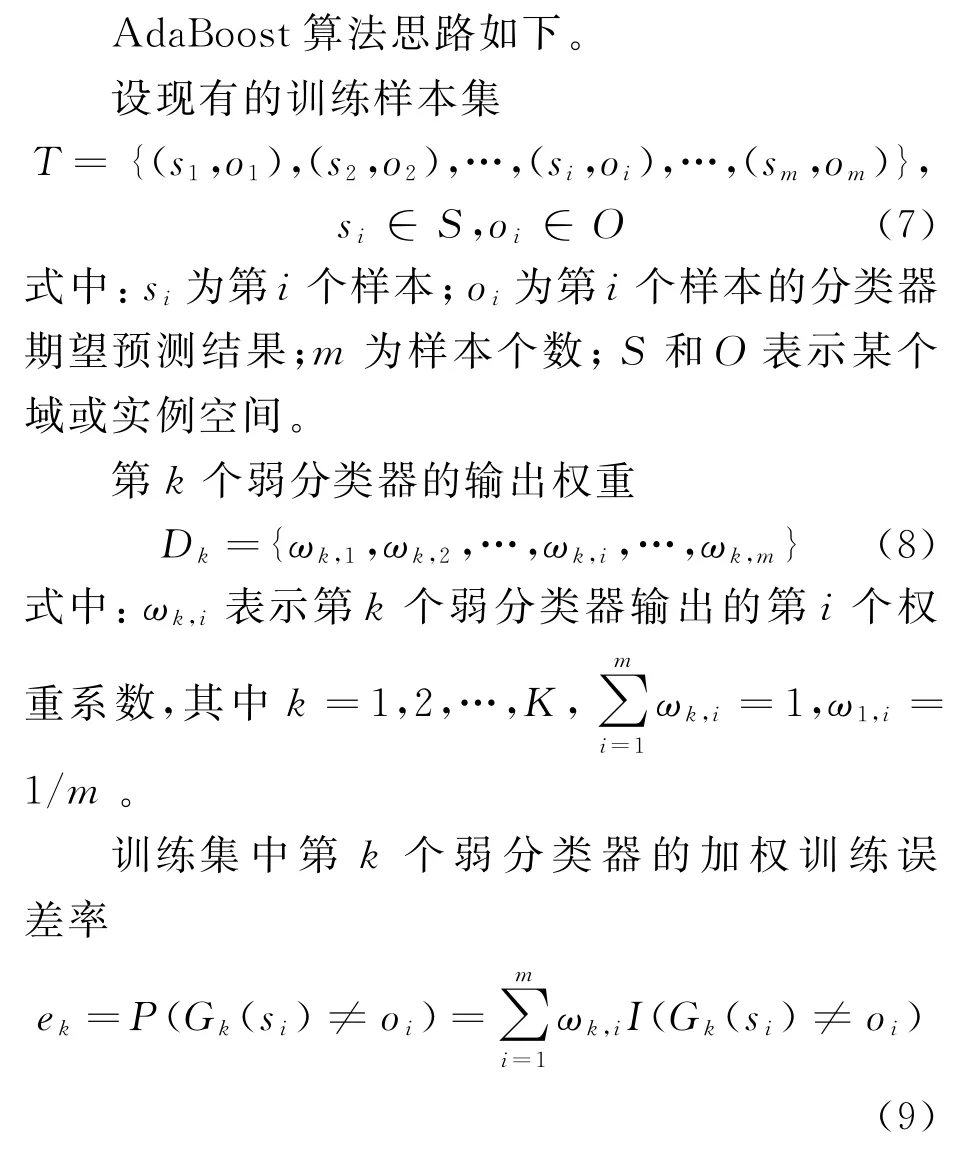
2 AdaBoost算法
AdaBoost算法的主要思想是利用训练集中的若干组数据训练若干个弱分类器,根据集成思想用这些弱分类器组集成实现一个强分类器。AdaBoost算法通过改变数据分布来实现集成目的。每个样本的权重是根据迭代过程中一般分类的精度和每个训练序列中每个样本的准确分级来确定的,赋予训练效果差的样本以及分类效果好的弱分类器更大权重。对若干个弱分类器进行加权处理,实时调整加权系数,利用多轮训练将这些弱分类器组合成为强分类器。算法流程如图2所示,其中为弱分类器个数。

图2 AdaBoost算法流程图
3 BP-AdaBoost模型
在AdaBoost算法中增加一个弱分类器,用于更新BP神经网络,即可构成BP-AdaBoost模型。BP-AdaBoost模型通过神经网络预测样本性能,并利用AdaBoost集成思想实现强分类器。BP-AdaBoost模型流程如图3所示。

图3 BP-AdaBoost模型流程图
BP-AdaBoost模型的计算过程如下。
随机选取个样本构成训练数据集,配置样本权重分布,根据样本数据集制定初始网络的基本结构,如网络层数和输入输出维度等,初始化网络的权重和阈值。用AdaBoost算法训练个网络,对样本值归一化,使其分布在 [0,1]区间。设D()表示第次迭代中样本的权重,其中1,2,…,,1,2,…,,为迭代次数。令1,初始化个样本的分布权重都是1/,即()1/。当初始网络学习结束后,依据样本预测误差更新样本权重和的权重。重复上述步骤,直至迭代次数达到。
依据次迭代的分类器函数N()和网络权重()进行分类。则最终集成的强分类器函数

4 仿真分析
假设机载多功能相控阵雷达在执行空空作战任务时有6种工作状态:非合作目标识别、校准/自动增益控制、气象规避、火炮测距、空中数据链路和中重频。为简单起见,将上述6种工作状态分别记为S1,S2,S3,S4,S5和S6。
仿真数据引自文献[12],雷达状态特征参数样本如图4所示。采用5种脉冲特征参数,包括脉冲重复频率(PRF)、脉冲宽度(PW)、占空比(DR)、脉冲压缩比(PC)和瞬时带宽(IB),建立脉冲描述字模型[PRF,PW,DR,PC,IB]。

图4 雷达状态特征参数样本
训练样本设置了6个标签对应S1~S6,每个标签对应200组数据,共1 200组数据。训练结束后,随机选取600组数据作为测试样本,利用Matlab 2020a软件仿真测试BP-AdaBoost模型对雷达工作状态识别的准确性。
BP-AdaBoost模型对6种雷达工作状态的识别率如表1所示,平均正确识别率为96.7%。

表1 6种雷达工作状态的识别率
BP-AdaBoost思想是形成一个由若干弱分类器组成的强分类器。对弱分类器及其集成的强分类器的预测性能进行对比,预测误差如图5所示。定义预测误差绝对值为预测类别与实际类别差值的绝对值。由于有6种雷达工作状态,预测误差的绝对值在0到5之间。可知,强分类器的预测误差绝对值在0~2之间变化,而弱分类器的预测误差绝对值在0~6之间变化,强分类器有更小的预测误差,容错率更高。这证明AdaBoost算法优化了BPNN的分类效果,减小了最终的误差。
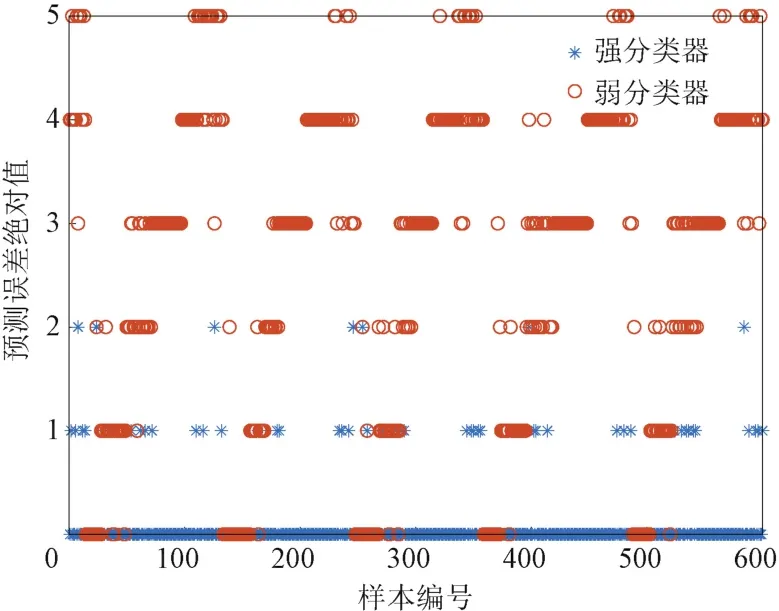
图5 强弱分类器识别预测误差对比
噪声引起的测量误差是仿真实验中重点考虑的影响因素。为了验证本文方法在各种测量误差条件下的性能,设定噪声引起的测量误差按5%步进,从0%逐步增加到30%,进行仿真实验。不同测量误差下,BP-AdaBoost模型对6种雷达工作状态的识别率如图6所示。状态S1~S5的识别率集中在95%~100%,且不随误差的增加而显著变化,状态S6的识别率随误差的增加变化趋势明显。状态S2与S4的识别率曲线重叠,S1与S5的识别率曲线重叠。状态S6中重频状态的识别率随着误差的增加而急剧下降,当参数测量误差超过25%时,识别率下降到60%以下。这是因为中重频状态的参数重叠最严重,导致参数错误下的识别率迅速下降。
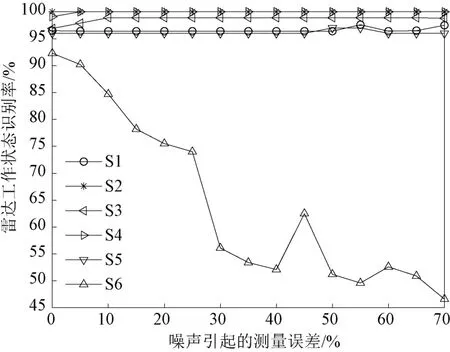
图6 不同测量误差下AdaBoost模型的识别率
BPNN分类器的分类效果如图7所示,其中所有数据点被划分为6个类别。可以看到单个BPNN分类器的识别效果并不差,但与BPAdaBoost分类器相比仍然存在一定差距,图中有大量的预测值偏离实际值。
存在噪声影响时,不同测量误差下BP-AdaBoost、BPNN和PNN 3种方法的平均识
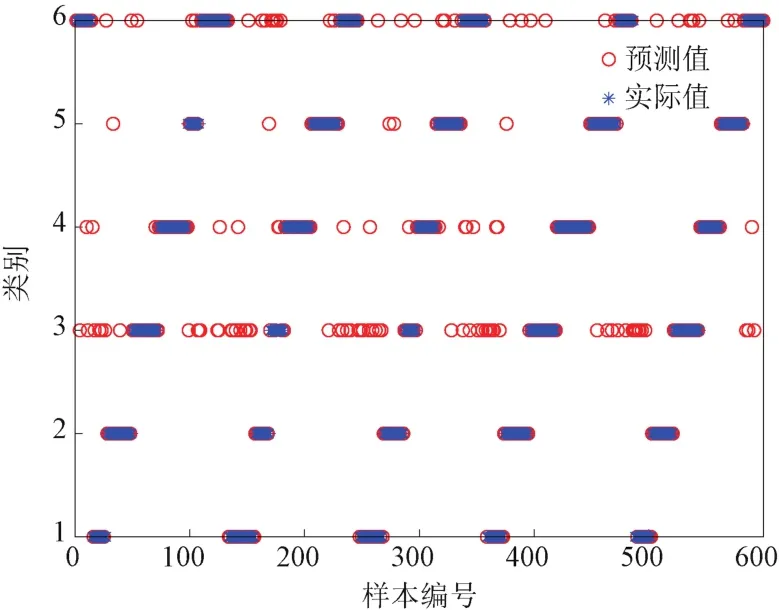
图7 BPNN的分类效果
别率曲线如图8所示。当没有噪声引起的测量误差时,BP-AdaBoost模型平均识别率高出PNN算法5%以上,高出BPNN算法10%以上,达到95%。随着噪声引起的测量误差增加到25%,BP-AdaBoost模型的识别准确率缓慢下降,而BPNN算法的识别率保持稳定。当测量误差增大到30%时,BP-AdaBoost模型识别准确率与BPNN算法相当。总体上BP-AdaBoost模型的平均识别率高于PNN与BPNN算法。

图8 不同测量误差下BP-AdaBoost、PNN、BPNN的平均识别率对比
5 结论
本文利用BP-AdaBoost模型,将BPNN与AdaBoost算法相结合,克服了雷达信号参数重叠导致的识别率下降问题。该模型使用多个BPNN分类器作为弱分类器,然后将它们组合成最终的强分类器。实验中采用5种信号特征参数来描述机载多功能相控阵雷达的6种工作状态,分类器的识别率得到显著提高。强分类器与弱分类器的识别效果对比仿真实验表明,BP-AdaBoost模型的强分类器识别效果优于弱分类器。此外,与BPNN和PNN等传统方法相比,BP-AdaBoost模型显著改善了识别过程,提高了识别率。