基于油压分析的液压扳手自动判停方法研究
2022-06-09
(中国计量大学 机电工程学院,浙江 杭州 310018)
引言
螺栓连接是设备安装中应用最为广泛的可拆卸式连接之一。对大型螺栓的紧固,相比于人工紧固,液压扳手不仅可减轻人工作业的劳动强度,还可提高施工效率和安全性[1],优势明显。因此液压扳手已成为众多工程项目施工中必不可少的装配工具。
液压扳手内置有液压油缸、棘轮组合机构,其输出扭力与油缸内油压平衡时,螺栓紧固扭力不再增加。对于液压扳手作业时的自动判停,最直观的方法就是用扭矩传感器及无线通讯模块来测量、传递扳手输出扭矩[2],决定泵站是否停机或切断油路供压;也可通过输出油路流量检测来判定液压扳手内置油缸是否仍有推进行程。但这两种方法均需要额外增加高成本的扭矩或流量传感器等设备。
液压泵站驱动扳手紧固螺栓是一个集机械、液压于一体的复杂系统,多学科领域的相互作用导致很难在单一的软件平台仿真其工作过程[3-4]。本研究通过ADAMS和AMESim软件的联合仿真模拟螺栓的紧固工况,提出一种采集既有泵站输出油压信息,分析紧固过程中油压周期脉冲特性曲线的相似度,间接反映螺栓所受扭矩是否达到目标扭矩的方法,可实现液压扳手的自动判停。
1 液压扳手及液压泵站工作原理
液压扭矩扳手(简称液压扳手),是以液体为介质以传递动力实现大扭矩输出,用于螺栓安装及拆卸的专业工具[5]。扳手的三维模型剖面如图1所示。液压泵站启动后通过马达产生动力,将内部的液压油通过油管介质传送到液压扳手,通过活塞位移来推动棘轮旋转。泵站通过循环加压回油重复上述扳手操作,最终液压力转化为驱动轴上的扭矩完成对螺栓的紧固[6]。由于扳手的输出扭矩仅与其自身型号及泵站输出油压有关且成比例[7],在紧固过程中扳手的输出扭矩与螺栓对其的反向扭矩是相等的,每拧一次螺栓,其反馈扭矩在前一次拧操作累积的扭矩上增加一个扭矩量,对应泵站在输出油压达到目标值过程中的某一油压值。因此泵站每次循环加压输出油压的波形中存在逐渐增大的拐点,在螺栓紧固完成时,拐点增大至目标压力,实现拧紧。
为了契合螺栓负载从初始较小阶段到随着螺母与法兰间的摩擦力逐渐增大而变大的过程,要求液压泵站能够同时满足前期的低压、大流量及后期的高压、小流量。本研究采用低、中、高压三联泵站的三级供油方式,既能够满足高压力的需求又能提升流量的供给范围达到节能降耗的目的[8],三联泵站原理图如图2所示。随着泵站输出油压的持续上升,溢流阀5,6依次打开,泵站的供油泵组由刚开始的三泵供油到中、高压两泵供油到最后的高压泵单独供油,实现流量的三级输出。泵站驱动扳手作业时图2中左侧油路通过油管连接如图1所示的扳手进油口,右侧油路连接扳手出油口,换向阀10,11通过电信号联动配合完成泵站输出油压的换向控制,实现泵站循环加压-回油过程,即对换向阀10,11同时供电时,泵站左侧油路出油右侧油路回油,泵站是正向加压状态,推动扳手活塞完成正向行程即紧固螺栓一次;当对换向阀10,11同时断电时,泵站左侧油路回油右侧油路出油,泵站是反向加压状态(溢流阀12作为限压阀,一般限制油压在8 MPa左右)推动活塞回到初始位置。
2 液压扳手及三联泵站建模仿真
2.1 建模
1) 扳手动力学建模
运用ADAMS软件对扳手进行动力学仿真,需要建立仿真模型,但直接在ADAMS中建模比较困难[9]。首先在SolidWorks软件中建立扳手三维模型,并将其导入ADAMS软件中建立扳手动力学模型如图3所示。
2) 三联泵站液压建模
三联泵站液压模型中电机转速为1000 r/min;低、中、高压三泵额定排量分别为5.6, 0.8, 0.8 mL/r;低、中、高压溢流阀开启油压分别为6,30,70 MPa;电磁换向阀阻尼比为0.8,额定电流为40 mA;螺栓选用M30型号,强度为5级;泵站与扳手间油路管道长度为2.5 m,内径为0.025 m,液压元件其他参数按默认参数设置[10-12]。
2.2 联合仿真建模与分析
1) 联合仿真建模
以AMESim软件为主控软件,ADAMS为辅助软件的模式联合仿真。通过接口文件将机械动力学模型和液压系统模型联合起来,以实现工作装置的机械与液压系统的数据交换,这种交互式的仿真方式,不仅能够较准确模拟液压扳手及液压系统的真实工作环境,而且能有效提高仿真精度和效率[13]。
首先,在ADAMS中设置活塞驱动力及螺栓负载扭矩作为输入变量,活塞位移及驱动轴转角作为输出变量;采用FMI(Functional Mock-up Inter-face)的方式完成AMESim和ADAMS联合,调用ADAMS-Control模块导出.fmu类型接口文件;最后,将接口文件与液压系统AMESim模型结合构成联合仿真模型,如图4所示。
联合仿真模型期望能够模拟液压泵站驱动扳手紧固螺栓的实际作业工况。对于液压泵站,可以输入可调的目标压力,如图4局部放大3中p所示,在仿真前对泵站目标输出油压p进行设置,期望达到实际工况下扳手的输出扭矩。通过泵站2个换向阀的信号控制,期望能够模拟出整个作业过程泵站输出油压、螺栓实时扭矩等曲线,并通过比较分析其中变化对应关系。由于仿真过程中驱动轴的驱动角抖动会导致螺栓输出扭矩不稳定,从而影响泵站的输出油压波形,应尽可能减小驱动轴转角的波动,在此模型中用到切比雪夫滤波器,预设通/阻带截止频率分别为1 Hz,20 Hz,通/阻带波纹大小保持默认,能够达到较好的滤波效果。
联合仿真过程中,机械与液压系统之间的数据实时传递,不同软件中相同物理量的单位必须相同。ADAMS 模型输出液压缸的位移及驱动轴转角作为AMESim模型的输入,AMESim模型输出液压缸的力和螺栓扭矩负载作为ADAMS模型的输入[14]。
2) 仿真结果分析
由于扳手的输出扭矩仅与其自身型号及泵站输出油压有关且与油压成比例,此扳手型号对应的油压(0~70 MPa)/输出扭矩(0~4553 N·m)转换系数为65,结合实际存在的泵站油缸内液压油泄漏等其他因素,转换系数可能有一定偏差。
预设泵的目标输出压力为18 MPa,螺栓紧固完成时其反馈扭矩为1170 N·m。图5a~图5c分别为螺栓紧固过程扳手油缸内活塞位移曲线、驱动转角曲线及泵站输出油压、螺栓扭矩变化曲线。第一次加压,0.29 s时油压增至p1即5.5 MPa,螺栓反馈扭矩增加至T1即329 N·m,活塞运动到行程终点,而后泵站迅速加压至目标油压,活塞位移、驱动轴转角及螺栓扭矩保持不变。第二次循环,泵站迅速加压1.21 s时达到p2即5.7 MPa ,螺栓反馈扭矩为T2即335 N·m,此过程油压在活塞上的作用力体现较螺栓反馈扭矩在活塞上的反向作用力体现小,活塞在行程初始位置保持静止;1.21 s后泵站缓慢加压,2.45 s时达到p3即12.4 MPa,活塞移至行程终点螺栓扭矩增加至T3即785 N·m,而后泵站迅速加压至目标压力。第三次循环,泵站迅速加压在3.3 s达到p4即12.3 MPa,螺栓
反馈扭矩为T4即790 N·m,此过程活塞在行程初始位置保持静止;3.3 s后泵站缓慢加压在4.49 s达到p5即17.97 MPa ,活塞移动至行程终点螺栓扭矩增加至T5即1140 N·m,输出扭矩误差约为2.5%。之后循环加压,螺栓的扭矩、活塞及驱动轴转角基本保持不变,螺栓紧固完成。整个过程中,每次拧操作螺栓扭矩都是在前一次操作累积的扭矩量基础上增加的,且当螺栓扭矩不变时(即活塞位于初、末位置时),油压上升速度很快,克服螺栓扭矩;当螺栓扭矩开始增加时(活塞初位置移动至末位置),油压上升很慢,所以紧固过程随着螺栓越拧越紧,油压曲线中第一个拐点(斜率降低)的位置是在上升的,每次油压的波形都在发生改变;紧固完成后波形基本一致。 由于输出扭矩存在一定的偏差,实际操作中为保证扳手输出需求的扭矩,应适当调大目标油压。
此仿真过程未考虑实际扳手紧固作业中,螺栓初始较松的状态下泵站驱动扳手转动相当于空负载转动的阶段,在空负载下进行仿真泵站输出油压波形亦没有发生变化,可以依此规律来设计判停算法。
3 油压波形相似度判停算法设计
扳手紧固作业分为紧固前、中、后3个时期:前期泵站的输出油压波形基本保持一致;中期泵站的输出油压波形发生明显改变;后期泵站的输出油压波形又恢复一致。由此,设计一种基于泵站输出油压波形相似度的判停算法来实现泵站对扳手的自动判停。
相关性分析是信号处理的基本方法[15]。油压波形相似度判停算法以相关性分析为基础,期望通过计算特定的2组油压脉冲数据的相似度找出扳手负载状态改变的时间点,继而判断螺栓实时状态。当分析到螺栓完成紧固时,泵站控制扳手停止工作。为进行波形间的相似度来分析,采用皮尔森相关系数计算公式[16]:

(1)
式中,E—— 数学期望
X,Y—— 待比较的2组数据点
将待比较的2组数据的协方差与2组数据的标准差之积相除得到2组数据的相关系数,相关系数越高波形越相似,最高为1。
相似度判停算法主要包括2层判断:第一层为启动判停判断,旨在找到扳手由前期空载转动变为中期带变化负载转动的时间点,即泵站实时相邻或相间2组油压波形相似度低于阈值(记为A1)来开启第二层判停判断;第二层判断为判停判断,旨在找出扳手由中期带变化负载转动变为后期紧固完成带恒定负载转动的时间点,即泵站实时相邻2组油压波形相似度高于阈值(记为A2)时,扳手判停。
3.1 判停算法设计
在算法中分别用3个数组new,mid,old来存放最近的3组相邻油压数据,通过循环值传递能够保证old,mid,new按照时间顺序存储最近3次油压波形的数据,便于实时计算相邻(new-mid)与间隔(new-old)2组油压波形的相关系数,分别记为C1,C2。第一次判断中用于比较的相关系数记为C3(初始值0),每一次循环加压取C1,C2,C3中的较小值赋给C3,这样能够很好的避免3.2节滤波处理中情况(2)的发生。当C3小于A1时开启判停判断,判停判断中取实时相邻的2组油压波形相似度C1与A2比较,C1>A2时,扳手判停。实现流程图如图6所示,index为油压脉冲的数量,pa为实时压力,pb为目标压力,当实时压力达到目标压力时,泵站完成一次脉冲,index加1。
控制算法中index对应泵站输出油压脉冲的次数,对应2次电磁阀动作(打开、闭合),记录一次成功的判停实验中index的数值,在相同的工况(螺栓的初始状态、型号及使用工况)下,泵站输出一定目标油压螺栓达到目标扭矩扳手判停时index应该相等,可以作为相同工况下螺栓判停的一个参考依据。index也可用于记录电磁阀动作次数,作为对电磁阀使用寿命的一个参考指标。
3.2 滤波处理
用于计算相关系数的2组油压数据的准确性,直接关系到算法中开启判停判断及停止扳手工作的准确性。当压力传感器由于外在环境因素影响,如泵站自身的抖动产生测量误差时,会导致计算的油压波形之间的相关系数存在偏差,产生如下3种误判情况:
(1) 在扳手空载作业时可能由于偏差相关系数低于A1,提前开启判停判断;
(2) 在扳手从空载变为负载时可能由于偏差相关系数仍高于A1,导致开启判停判断延迟;
(3) 在扳手满载时可能由于偏差导致相关系数低于A2,导致扳手判停延迟。
因此,本研究选用5点滑动平均法对采集到的油压数据进行滤波处理,即数据中相邻 5 个采样值进行平均处理,该方法能有效的抑制异常点[17]。
4 实验及结果分析
实验选用2XLCT-50型液压扳手及三联扳手泵,分别设置泵站的输出压力为18,25,30, 35 MPa进行实验(随机设置,验证判停算法对于不同油压的适应性),设置A1为85%,A2为96%。
通过实验发现,对于不同目标,油压泵站在驱动一把扳手作业时均能够精准判停;在驱动2把扳手作业时,会偶尔出现扳手判停但一个螺栓未拧紧的情况。经分析是由于扳手在其中一个螺栓拧紧后的2次拧操作中,另一个螺栓还处于空转状态,此时泵站输出的2次油压波形基本一致,扳手判停。因此对于2把扳手的判停,在一把扳手拧紧后的2次拧操作过程,另一个螺栓至少开始拧紧即另一把扳手开始受到变化的负载(2个螺栓的初始差异要限制在扳手5次拧操作之内)。
图7为现场测试工况图,图8为目标压力30 MPa时泵站驱动1把扳手作业过程泵站输出油压实时显示图。
由图8可得第7次油压波形开始发生变化,第8,9次油压波形变化明显,往后油压波形基本无变化且和第7次前的油压波形保持一致,可判断在第9次加压完成了扳手对螺栓的紧固作业。图8中油压曲线每次加压均会在6 MPa附近产生一个抖降,这是由于在6 MPa 附近为流量切换点,流量瞬间减小时油压会产生明显的降低。表1为MCU(泵站控制器核心处理单元,此处使用的是STM32单片机)处理数据后,计算得到的全过程实时及相邻2组油压波形间的相关系数。
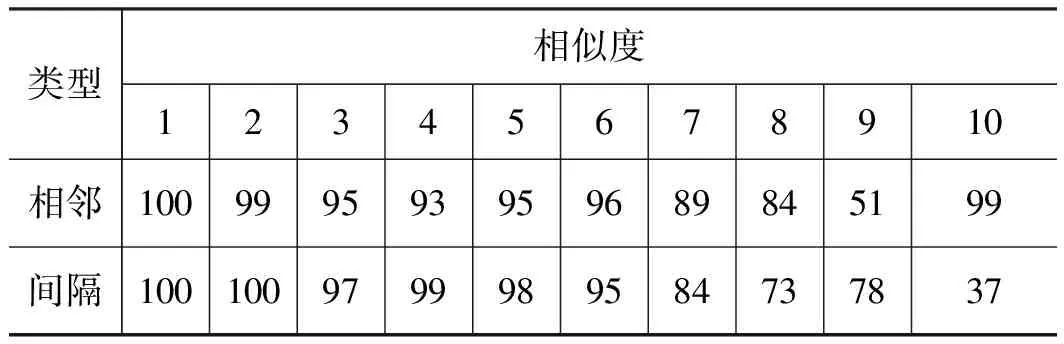
表1 实时相邻、间隔2组油压波形相关系数计算表Tab.1 Real-time correlation coefficient calculation table of two groups of adjacent and interval oil pressure waveforms %
表1中第7次计算的相邻及间隔相似度明显降低,分别为89%,84%,表明泵站在第8次加压过程中的油压输出波形较前2次发生明显变化。取84%记为C3,小于A1,由此开启判停程序;第10次计算的相邻2组油压波形相似度恢复至99%,表明泵站第10次、第11次加压过程的输出波形基本恢复一致,由于99%大于96%,此时停止泵站,查看螺母状态,达到了目标。
5 结论
通过ADAMS和AMESim软件完成对液压泵站驱动扳手紧固螺栓工况的联合仿真,总结出螺栓紧固作业过程扳手的实际输出扭矩要略小于理论输出扭矩值及螺栓紧固前、中、后3个时期泵站输出油压波形的变化规律,在此基础上设计基于油压波形相关性分析的液压扳手自动判停算法,该算法能够实现扳手作业的准确判停,解决用扭矩等其他传感器实现扳手自动判停方法所存在的问题。在双(多)油路输出驱动双(多)扳手的工作场景中,对螺栓的初始状态有约定(同步控制)条件下,上述判停算法仍可适用。
