常导长定子高速磁浮限界计算探讨
2022-06-07聂云斌马卫华罗世辉左玉东
聂云斌,马卫华,罗世辉,雷 成,左玉东
(1.西南交通大学牵引动力国家重点实验室,成都 610031; 2.郑州铁路职业技术学院,郑州 451460; 3.中铁第四勘察设计院集团有限公司,武汉 430063)
引言
磁浮交通作为一种集安全、便捷、高效、绿色等优势为一体的新型轨道交通制式,磁悬浮技术作为磁浮交通的核心,已然受到世界各国学者的追捧[1-3]。近些年来,磁悬浮技术飞速发展,日本、韩国及中国都有已实现商业化的磁浮线路,作为高端轨道交通技术,中国更是将磁浮列车关键技术研究列入“八五”攻关计划,并在“十二五”“十三五”中将磁浮交通系统作为国家科技支撑计划之一[4]。
为保证车辆运行的安全,世界各国先后制定了相应限界标准。其中,国外车辆限界标准主要有德国的BOStrab《城市轨道交通建设和运营规则》、国际铁路联盟的UIC-505-1《铁路运输车辆-机车车辆构造限界》和澳大利亚AS7507.1:2009《铁路轨道车辆-轨道车辆外形-第一部分:轨道车辆》,但这些标准均为轮轨车辆限界标准。国内标准主要有CJJ/T262—2017《中低速磁浮交通设计规范》、CJJ/T96—2018《地铁限界标准》和TB10630—2019 《磁浮铁路技术标准(试行)》,这些标准涵盖轮轨车辆和磁浮车辆两个领域。轮轨车辆的限界研究已从计算过程、方法和理念研究[5-9]拓展到集成限界计算、设计、绘图、生成计算报告的动态限界计算软件开发[10-11],还有学者考虑了空气动力的影响,进行了三维虚拟限界研究[12-13]。相比轮轨限界,国内磁浮限界由于起步晚,商业运行线路少,限界研究相对落后,还处于计算方法的研究,部分学者对磁浮轨道限界的检测进行了研究[14]。随着国内磁浮交通研究进一步向工程化方向发展,限界作为其工程化的重要组成部分,有必要开展磁浮限界研究。
一些学者先后对EMS型中低速磁浮车辆限界、设备限界及建筑限界展开了研究,得到了合理的中低速磁浮限界计算方法[15-18]。文中研究的高速磁浮和上海高速磁浮均为常导长定子高速磁浮,与以长沙磁浮为代表的中低速磁浮为同一种悬浮方式,因此,部分计算参数和运行工况类似,但在结构上又有所不同,无论是悬挂方式还是导向方式均存在较大的差异,故中低速磁浮限界计算方法不再适用。结合高速磁浮自身的结构特点,对限界方法进行探讨分析,为推进高速磁浮工程应用提供参考。
1 计算方法和计及要素
高速磁浮限界仍然为三限界体系,包括车辆限界、设备限界(包含非空气动力设备限界及空气动力作用设备限界)和建筑限界。车辆限界是限界体系的核心,所有限界计算均在车辆限界的基础上进行。直线段设备限界考虑了车辆故障工况时在车辆限界上进行加宽和加高。曲线地段设备限界在直线地段设备限界的基础上进行加宽和加高。当线路周边没有其他设备安装时,建筑限界向内侵入空气动力作用设备限界。文章中只对车辆限界和设备限界进行计算。
在限界计算时,将参数以其概率性质分为随机因素和非随机因素两大类,对非随机因素采用线性相加合成,对服从高斯概率分布的随机因素用均方根合成的方式,将两大类进行叠加形成车体偏移量。
车辆运动主要有浮沉、横移、点头、摇头和侧滚,在计算时应充分考虑[17]。车辆限界计算以高速磁浮正常运行于平直线上为基准,其要素主要分为两个大类,即车辆部分和轨道部分。其中,包括车辆制造及安装误差、悬浮间隙和导向间隙的动态变化、车体和轨道形变、车体结构、滑撬最大磨耗、线路几何偏差、偏载、车体倾斜时的附加倾角、横风等。车辆限界中没有涵盖曲线线路和故障工况,曲线运行及空簧失气、悬浮和导向失效等故障工况均在设备限界中考虑。
2 主要参数及车辆轮廓线选取
2.1 车辆及线路主要参数
以某高速磁浮列车及线路为研究对象,选取车辆及线路的参数,部分技术参数如表1所示,计算断面如图1所示。

表1 车辆与线路基本技术参数
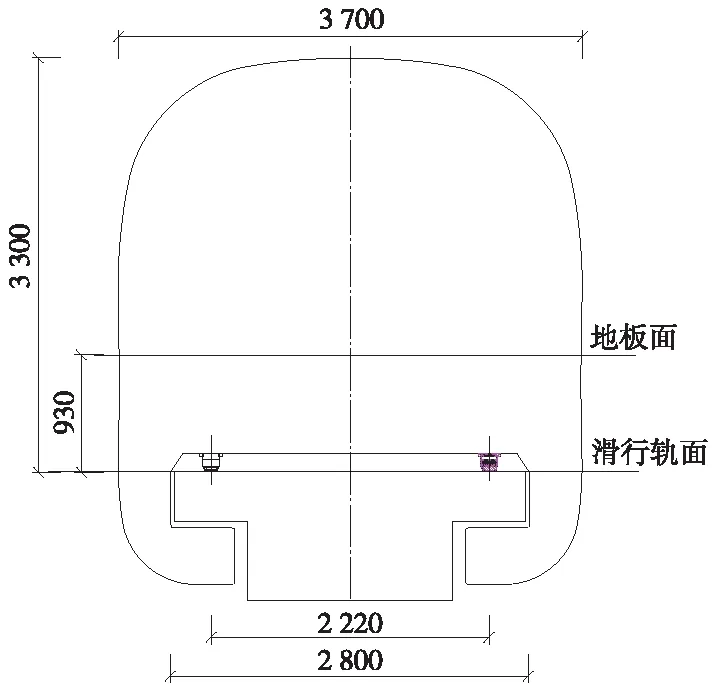
图1 计算端面(单位:mm)
2.2 车辆轮廓线选取
2.2.1 基准坐标系
垂直于直线轨道线路中心线的二维平面直角坐标。横坐标轴即X轴,与滑行轨面相切,纵坐标轴即Y轴,垂直于滑行轨面,该基准坐标系的坐标原点为轨距中心点,车辆限界、设备限界、建筑限界均为统一坐标系。
2.2.2 车辆轮廓线
车辆轮廓线选取原则为[20]:(1)车体最大偏移位置必须设置控制点,如车顶、车肩和车底边梁等;(2)轮廓线既要如实反映车辆外形,又要使其范围尽可能小,同时为计算方便,轮廓线选取不应过于复杂。
鉴于以上原则,常导长定子高速磁浮轮廓线如图2所示,其中,控制点0~6在车体上,控制点7~17在悬浮架上,各控制点坐标如表2所示。

图2 高速磁浮计算轮廓线

表2 车辆轮廓线坐标值 mm
3 车辆限界
车体及安装部件的偏移量应根据车体横移与车体侧滚同向和反向以及车体浮沉3种情况。参考《高速磁浮交通设计规范(征求意见稿)》及文献 [16-18,20]计算公式,并另考虑车体载客不均引起偏斜和侧风等使重心偏离原来位置重力产生的附加倾角。文中仅列出车体横移与侧滚同向时的公式。
(1)车体横向
(1)
(2)车体垂向向上
ΔYBPu=ΔXBDY+ΔMBY+ΔMqc+f2+fXF+δc-θpx·X-
(2)
(3)车体垂向向下
ΔYBPu=ΔXBDY+ΔMBY+ΔMqc+f2+f1dx+δe+θpx·X-fXF+
(3)
其中,空簧侧滚挠度计算公式为
式中,ΔXdx为导向电磁铁动态横移量,mm;Δw为2、7位悬浮框弹性变形,mm;a27为2、7位悬浮框纵向间距,mm;n27为计算断面距2或7悬浮框纵向距离,mm;Δe为轨道横向弹性变形,mm;θpx为载客不均引起车体偏斜角,rad;hcs为空簧上支撑面距轨面高,mm;ΔMBDX为车体横向弹性变形,mm;ΔMBX为车体横向制造误差,mm;Δc为轨道中心线横向偏差,mm;Δfpxf悬浮间隙动态变化量,mm;L两侧定子中心距,mm;hdz为定子作用面距轨面高,mm;Δh2为左右轨弹性高差,mm;Δfp为悬浮电磁铁垂向挠度,mm;hcp为悬浮电磁铁橡胶支撑面距滑行轨面高,mm;Δh1左右轨高差,mm;ΔMBDY车体垂向弹性变形,mm;ΔMBY为车体垂向制造误差,mm;ΔMqc位2/7悬浮框外车体上翘/下垂量,mm;f2为空簧高度调整误差,mm;fXF为悬浮提升量,mm;δc轨道中心线垂向偏差,mm;bs空簧横向距离,mm;f1dx为悬浮架空重车弹性挠度变化,mm;δe为轨道垂向弹性变形,mm;Aw为车体单侧受风面积,m2;Pw为风压强,N/m2;S为重力倾斜附加系数,rad;hsw为车体重心高,mm;hcs为空气弹簧上支撑面距轨面高,mm;kφs单节车空簧侧滚刚度,N·mm/rad;mj为超载车体质量,kg;aB横向加速度,m/s2;hsw为车体收面积形心高,mm;hsc为车体重心高,mm。
地面线车辆限界各控制点坐标如表3所示。

表3 车辆限界坐标值 mm
4 设备限界
4.1 直线段设备限界
直线段需考虑车辆限界和设备限界,直线地段设备限界与车辆限界之间应留有足够的安全间隙,需考虑车体肩部横向间隙、车体肩部垂向间隙、车体下边梁横向间隙、车体下边梁向下间隙、车体顶部向上间隙(含竖曲线偏移量)。根据高速磁浮结构特点,主要考虑悬浮、导向电磁铁及空簧故障等工况。此处仅列悬浮和导向电磁铁失效工况下计算公式。
(1)车体横向
(4)
(2)车体垂向
ΔYBPu=X·(Δfsk-Δfpxf)/L
(5)
故障工况下,直线段非空气动力作用设备限界与直线地段车辆限界的安全间隙值应满足:
(1)车体顶部向上60 mm(含竖曲线);
(2)车顶肩部横向间距应为100 mm;
(3)车体侧墙从车肩向下100 ~30 mm递减;
(4)车底边梁横向间距应为30 mm;
(5)车底边梁及车体下吊挂设备向下间距应为50 mm;
(6)悬浮架部分横向及垂向间距应为15~30 mm。
如故障工况引起的附加偏移量超出此安全间隙值,则应考虑超出安全间隙部分的偏移量。
直线段非空气动力作用设备限界对应各控制点坐标如表4所示。

表4 直线段非空气动力设备限界各点坐标值 mm
4.2 曲线段设备限界
高速磁浮悬浮架均匀分布于轨道上,由于其采用主动控制和抱轨运行的独特运行方式,悬浮架与轨道在垂向上不能产生较大的位移,这与中低速磁浮类似[21]。高速磁浮车体底架与悬浮架之间由摆杆和摇臂与空簧相连,在竖曲线半径为1 500 m的大半径竖曲线上车体底架上的设备不会与轨道相碰,且在直线段非空气动力作用设备限界处考虑安全间隙包含了竖曲线加高,故此处不再考虑竖曲线加高量。
4.2.1 几何偏移引起加宽
曲线地段非空气动力作用设备限界的加宽或加高原则上按曲线半径计算几何偏移。由于高速磁浮和中低磁浮不同,车体与悬浮架之间通过摆杆连接,同时附加4对辅助弹簧和4对止挡弹簧,即车体与摇枕间横向有一定间隙,因此,车体相对悬浮架不具有固定转心,在通过曲线时是处于动态平衡的过程。在分析计算曲线加宽时,采用SIMPACK动力学仿真方式模拟列车在曲线上静悬浮时相对轨道的偏移量,高速磁浮动力学仿真模型如图3所示。

图3 高速磁浮动力学仿真模型
由于车头呈流线形设计,故需在车体前端取2个点进行计算来确定加宽量的取值,图4为取点位置示意,即车体前端1和车体前端2,车体前端2为车头横向距离最宽处,若两点相对轨道偏移量的差值小于两点的横向距离,取车体前端2相对轨道偏移量为曲线加宽值,若两点相对轨道偏移量差值大于两点的横向距离,再往前取点重新进行计算。

图4 测试点位置示意
车体各被测点在R=650 m曲线下相对轨道的偏移量如图5所示。由于车体前端两点相对轨道偏移量差值小于两点的横向距离,取车体前端2相对轨道偏移量为曲线加宽值。其他曲线半径计算方法相同。

图5 R=650 m曲线车体相对轨道偏移量
4.2.2 超高及欠超高引起加宽和加高
(1)车体横向加宽
曲线内侧加宽
ΔXQi=sinθac·(Y-hcs)S×(1+S)
(6)
曲线外侧加宽
(7)
(2)车体竖向加高
超高所致
(8)
欠超高所致
(9)

R=650 m曲线限界如图6所示,对应各控制点坐标值如表5所示。
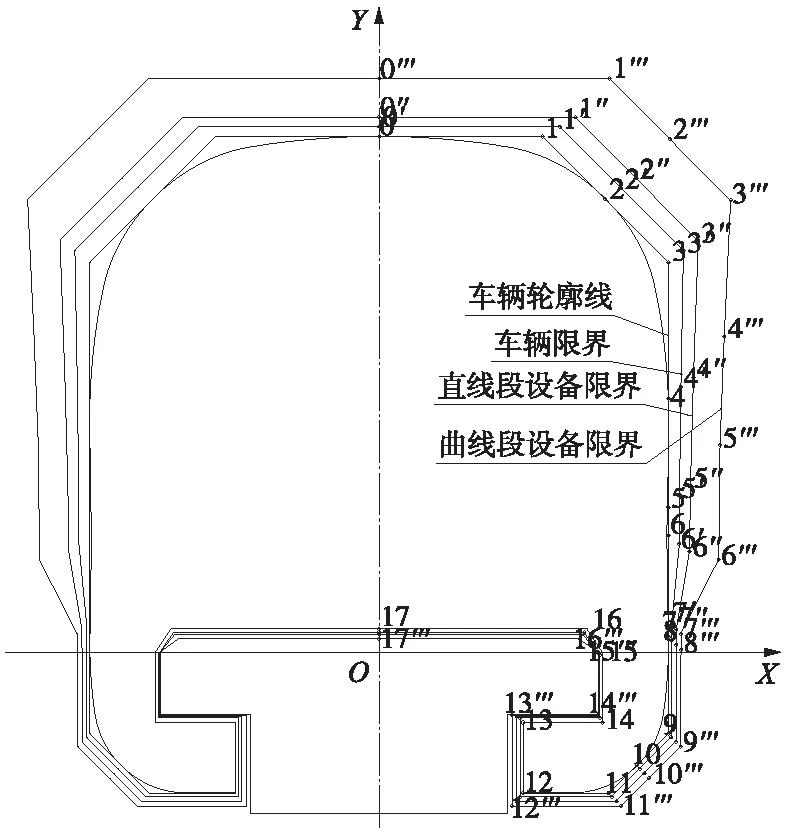
图6 R=650 m非空气动力作用设备限界
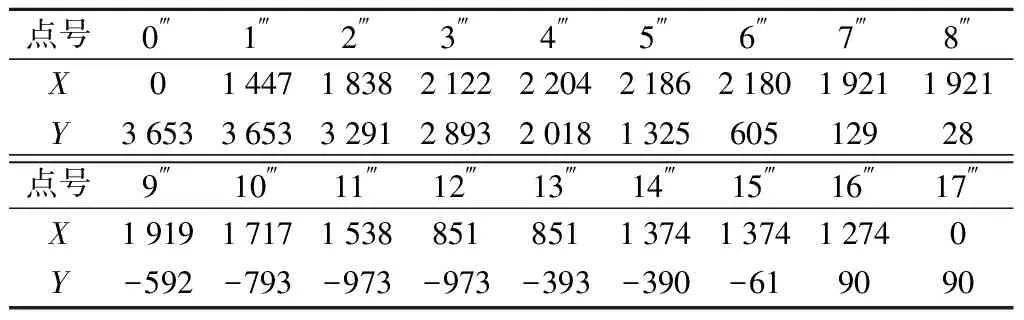
表5 R=650 m曲线非空气动力设备限界各点坐标值 mm
按照TB10630—2019《磁浮铁路设计标准(试行)》中限界图示,现将车辆限界和非空气动力作用设备限界整理如图7所示。

图7 R=650 m高速磁浮限界(单位:mm)
5 结语
通过介绍高速磁浮限界计算方法及所计及的要素,给出车辆与线路的基本技术参数,结合常导长定子高速磁浮的结构特点,参考地铁车辆、中低速磁浮车辆及高速磁浮相关规范,对高速磁浮限界进行了系统、全面地计算,主要结论如下。
(1)考虑车辆、轨道、偏载、横风等各要素,更全面考虑高速磁浮车辆限界计算因素,并计算其车辆限界。
(2)在车辆限界的基础上,考虑不同故障工况影响,计算了直线段设备限界。
(3)从高速磁浮结构上考虑,由于高速磁浮不存在固定转心,从动力学分析角度出发,建立了高速磁浮动力学模型,分析了线路几何偏差引起的曲线加宽,并叠加超高或欠超高引起的曲线加宽,构成了曲线段设备限界。
(4)给出该参数下高速磁浮在半径为650 m曲线段上的限界,得出非空气动力作用设备限界顶部距滑行轨面3 655 mm,底部距滑行轨面1 000 mm,宽4 240 mm为宜。