基于星载合成孔径雷达的环扫成像模式设计
2022-06-02李诗润杨娟娟王万林牛文博
李诗润,刘 昕,杨娟娟,王万林,牛文博
(中国空间技术研究院西安分院,西安 710000)
0 引言
星载合成孔径雷达(synthetic aperture radar,SAR)由于能够全天时、全天候对地观测,已经成为对地观测卫星的重要手段。自1978年美国成功发射第一颗合成孔径雷达卫星Seasat-1以来,在世界上掀起了主动式微波遥感对地观测卫星的热潮。欧洲、日本、俄罗斯、加拿大、中国等国家和地区相继发射了自己的合成孔径雷达成像卫星[1]。SAR在国土资源测量、海洋水文观测、环境灾害监视、地形测绘、军事侦察以及其它领域发挥了越来越重要的作用。
随着应用领域的扩大及星载SAR技术的发展,多种新型SAR成像模式在星载领域得到了演示验证与实际的应用,除了传统的条带模式外,滑动聚束模式、扫描模式、马赛克模式等新模式相继出现[2],其中,滑动聚束模式通过增加方位向波束驻留时间提高了方位分辨率,但成像区域较小,且无法连续观测;扫描模式通过距离向波束扫描增加了观测带宽度,但降低了方位分辨率[3];马赛克模式综合了滑动聚束模式与扫描模式的优点,在距离与方位上形成若干个高分辨率子图像,而后再将这些子图像拼接合成为一幅较大范围的高分辨率图像[4]。在卫星系统设计中,一般根据不同应用对成像分辨率和观测带宽度的不同需求来选择成像模式,但无论哪种模式,通常的观测带宽度仅为几十公里或上百公里,由于卫星飞行速度快,重访周期长,对于具有广域海面目标搜索或大面积地形测绘的应用需求来说,卫星的工作效率较低,时效性不强,这是制约当前多数微波遥感卫星应用的主要问题,例如国际上著名的SAR卫星SIR-C、ALOS、RadarSat-2等[5]均基于卫星获取的数据开展了海上目标检测的测试,但均停留在数据研究及试验模式,无法作为卫星的应用模式[6-8]。
本文主要研究了一种基于星载合成孔径雷达的环扫成像模式设计,简称环扫SAR成像,这种模式最大特点是天线能够绕卫星的垂直轴快速旋转实现环扫成像,利用合成孔径雷达的成像原理,能够在一次成像过程中获取大面积的环状目标区域图像信息,通过合理的参数设计,可以实现对上千公里以上的范围进行连续观测,有效获取场景内的有用信息,如大范围内的船只搜索或地形轮廓测量等;首先介绍了环扫SAR成像的几何模型与成像原理,然后对环扫SAR成像参数进行了分析,最后通过计算机仿真与环扫成像在轨获取的图像结果进行了有效验证。
1 环扫SAR成像原理
1.1 几何模型
在传统的成像模式中,合成孔径雷达的天线波束默认指向卫星的星下点方向,通过卫星的摆动实现侧视成像,或者天线在安装时其法线与卫星的星下点方向具有一定的倾角,通过天线的波束扫描能力来实现侧视成像,如图1所示。

图1 传统成像几何模型—正侧视条带SARFig.1 Traditional imaging geometric model-positive side view strip SAR
在环扫SAR成像模式中,雷达天线在卫星平台上倾斜安装,并且具有绕卫星+z轴360°的扫描能力,将雷达天线的法线方向与卫星的星下点方向(卫星+Z方向)称之为雷达下视角φ,将天线波束方向投影到地面上矢量与卫星星下点运行方向的夹角定义为方位角θ,天线波束扫描的角速度定义为ω,整个成像几何模型如图2所示。
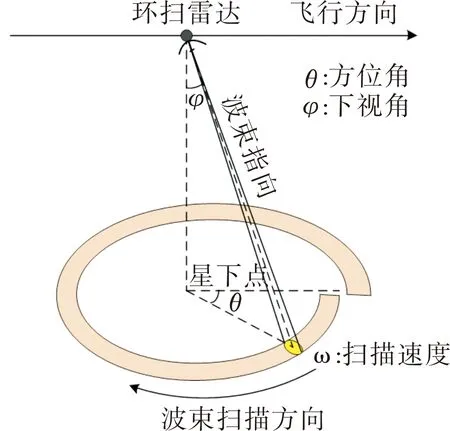
图2 环扫SAR成像几何模型Fig.2 The circular scanning SAR-imaging geometric model
通过合理的几何模型设计,可以将多个环形成像区域进行无缝拼接,从而将成像区域由数十公里拓宽为上千公里,这是传统的成像模式无法企及的优点。
1.2 最优覆盖设计
在环扫SAR成像过程中,一旦雷达天线波束在地面的瞬时覆盖范围确定以后,整个环扫覆盖模型的变化主要是由天线的扫描角速度决定,当连续两圈的波束覆盖在星下点运动方向恰好实现拼接时,可以获得最优的覆盖设计,如图3所示。

图3 最优波束设计示意图Fig.3 The schematic diagram of optimal beam design
(1)
式(1)中,ω为天线旋转扫描的角速度(°/s);VB为卫星星下点在地球表面上的运行速度(km/s);Wr为雷达天线波束在地球表面上沿距离方向上的覆盖宽度(km)。
由传统SAR成像几何模型可知,天线波束在地球表面上的覆盖范围与卫星的轨道高度及天线的波束张角等参数相关,如图4所示。

图4 条带SAR成像波束覆盖图Fig.4 The strip SAR-imaging beam coverage
(2)
式(2)中,H为卫星的轨道飞行高度(km);RE为地球的半径(km);θr为雷达天线的距离向波束宽度(°),η为雷达天线中心法线方向的下视角(°)。将式(2)代入式(1),便可以得出在满足最优波束覆盖时的雷达天线的旋转角速度如下式。

(3)
当雷达天线的旋转角速度满足式(3)时,雷达天线波束的连续多圈覆盖在星下点运动方向恰好实现拼接,若旋转角速度过小会出现漏扫的情况,若旋转角速度过大会出现覆盖过度重叠的情况。
2 环扫SAR成像参数分析
对于环扫SAR成像来说,图像的二维空间分辨特性与成像幅宽是最为关键的成像参数,下面对环扫SAR的空间分辨率与成像幅宽展开分析。
2.1 空间分辨率
通常情况下SAR图像的空间分辨特性是二维的,用距离向分辨率和方位向分辨率来进行表征,对于环扫SAR成像模式,距离向分辨率与其他成像模式的实现方法一致,采用脉冲压缩的方式实现,因此距离向分辨率由下式确定:
(4)
式(4)中,c为电磁波的传播速度(m/s),Br为发射信号带宽(Hz),θi为雷达波束在目标处的入射角(°),若雷达天线在卫星上的安装倾角固定,在卫星姿态不变的情况下,雷达波束相对于地面目标的入射角不变,则距离向分辨率为固定值。
环扫SAR成像模式的方位向分辨率和传统条带模式不同,与雷达天线的扫描方位角相关,不同方位角处的分辨率不同,如图5所示[9-10]。
假设雷达波束内的两个目标A和B,两个目标到天线中心的距离相同、扫描角相同,方位角相差Δα,波束扫过目标的视在速度为v(m/s)。
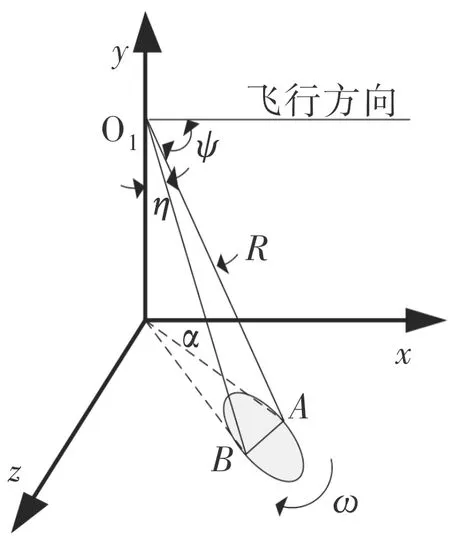
图5 环扫SAR成像波束图Fig.5 The circular scanning SAR-imaging beam
A点处多普勒中心频率为:
fdA=(2vcosψ)/λ=(2vcosαsinη)/λ
(5)
B点处的多普勒中心频率为:
fdB=(2vcosψB)/λ=[2vcos(α+Δα)sinη]/λ
(6)
假设角度很小,则A、B两个点目标的多普勒频差为:
Δfd=fdA-fdB≈2vsinαsinη·Δα/λ
(7)
脉冲积累时间为Td,可分辨的多普勒频谱宽度Δf=1/Td,由式(7)可知,对应的角度分辨率为:
(8)
因此,方位向分辨率为:
(9)
从式中可以看出,环扫SAR的方位分辨率随着方位角不断变化,在左右正侧视的位置(α为90°或270°)分辨率最好,在前后视的位置(α为0°或180°)分辨率最差,接近于无穷大[9]。
一般情况下,环扫SAR模式的成像幅宽可达上千公里,成像范围内的方位向分辨率的变化为几十米至数百米,由于分辨率差异、成像场景的差异将整幅图像拼接后的视觉效果将会受到一定影响。但环扫SAR的应用通常为广域范围内的目标检测,例如对海洋、沙漠、草原等单一场景内包含的大型目标进行搜索,目标检测可以不用获得拼接完整的图像,而是根据方位角的变化进行子图像的划分,此时每个子图像内的分辨率基本相同,处理获得子图像后直接进行目标检测,子图像的大小可以根据系统的工作参数进行动态调整,以确保设置合理的检测参数。
2.2 成像幅宽
环扫SAR成像模式能够在一次成像过程中获取大面积的环状目标区域图像信息,主要满足在广域搜索场景下的大视场覆盖范围的应用需求,因此,成像幅宽是其最为重要的指标,传统的条带SAR成像模式的地面幅宽Wr如1.2节中式(2)所示,而对于环扫SAR来说,定义卫星飞过成像区域时左右两侧最远距离之间的宽度为成像幅宽,也称之为刈幅,表示为Sw,如图6所示。
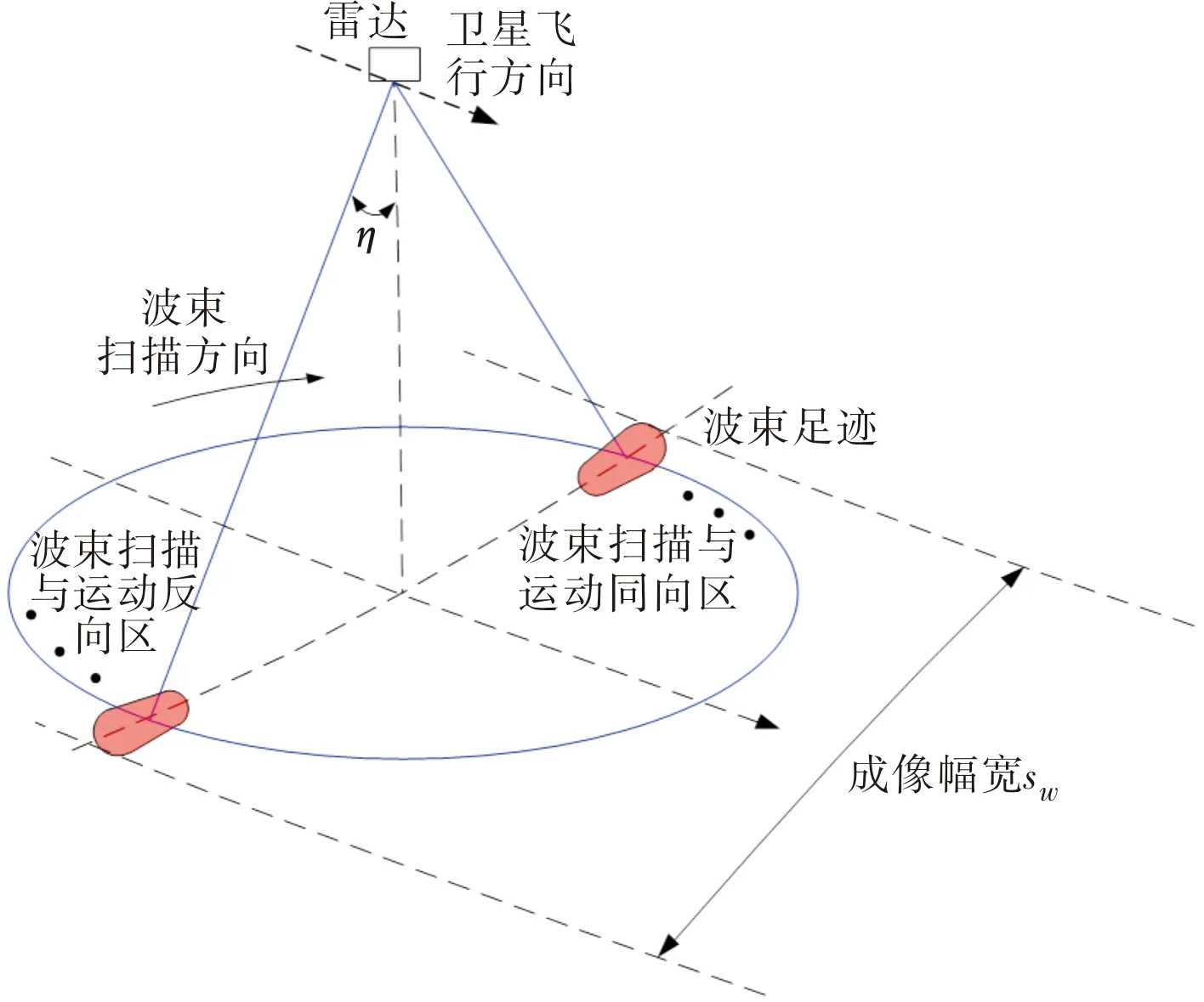
图6 环扫SAR成像幅宽Fig.6 The circular scanning SAR-imaging width
结合图4与式(2)关系可知:
(10)
3 仿真与验证
3.1 计算机仿真
仿真条件如表1所列。
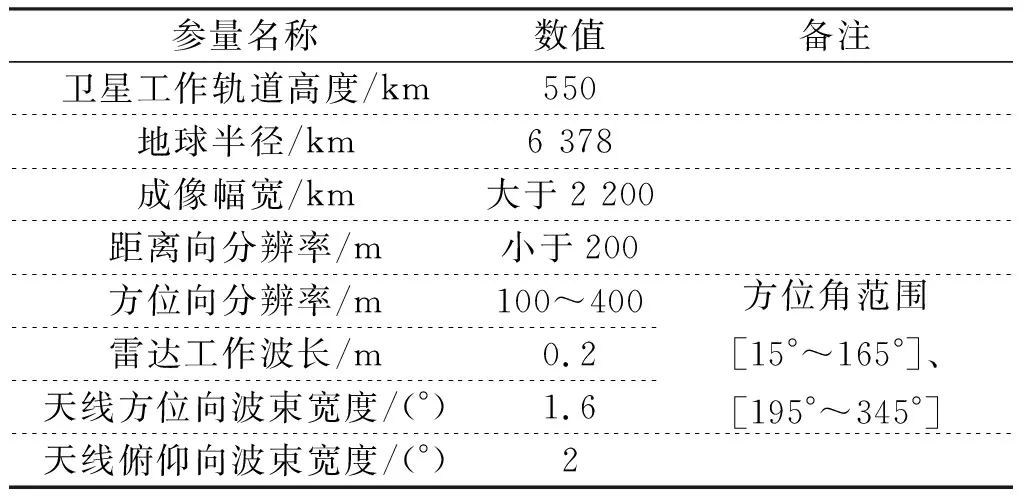
表1 环扫SAR仿真条件
按照表1中所列参数,本系统采用环扫SAR成像实现广域搜索场景下的大面积成像,要实现成像幅宽大于2 200公里,由图6与式(10)可知,当卫星轨道高度与天线波束宽度确定后,成像幅宽主要取决于天线的下视角,此处取雷达下视角固定为59°,如图7所示。
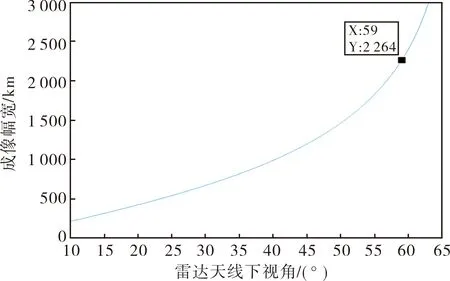
图7 成像幅宽仿真结果Fig.7 Simulating results of the imaging-width
根据2.1节关于空间分辨率的分析,距离方向的分辨率取决于雷达发射信号带宽,此处将发射信号带宽设计为1 MHz,则距离向分辨率为175 m;方位向分辨率由式(9)可以得出与雷达扫描方位角的关系,如图8所示。
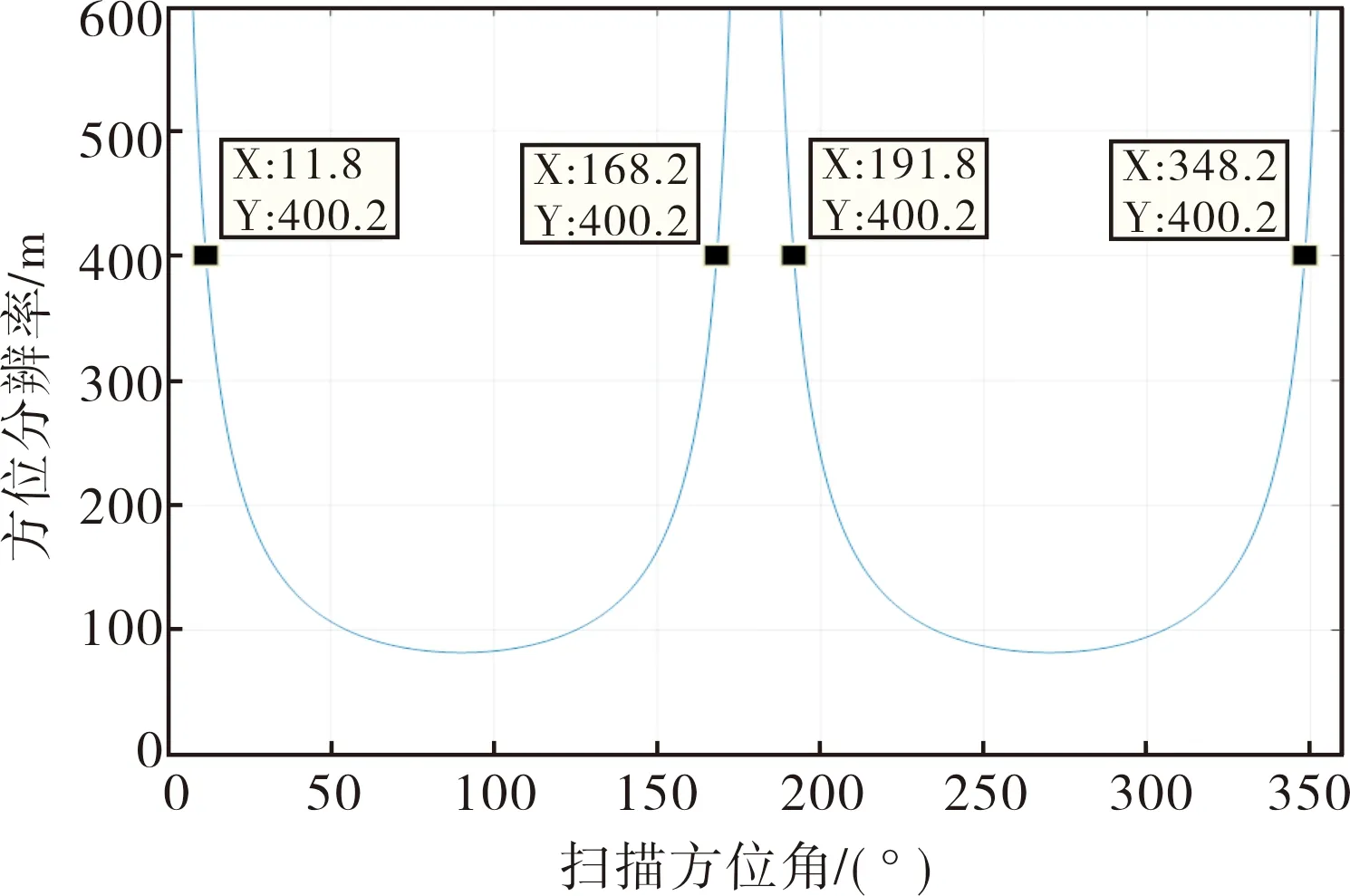
图8 方位分辨率仿真结果Fig.8 Simulating results of the azimuth-resolution
由图8可以看出,当扫描方位角为90°和270°时,即左右正侧视的位置,方位分辨率最高,优于100 m,当扫描到其他角度时,分辨率逐渐变差,当扫描方位角为0°和180°时,即正前视、正后视时的分辨率最差,在[12°~168°]与[192°~348°]的方位角范围内可以满足100~400 m的要求。
按照上文分析,可以通过式(3)求得在仿真条件下天线的最优扫描速度,图9给出了在3种不同扫描速度下的环扫成像的地面覆盖足迹在STK软件中的仿真结果,图9(a)的扫描速度为18°/s,为最优覆盖足迹;图9(b)的扫描速度为30°/s,此时地面覆盖足迹存在比较大的重合,成像效率较低;图9(c)的扫描速度为6°/s,此时出现了较大区域的漏扫。
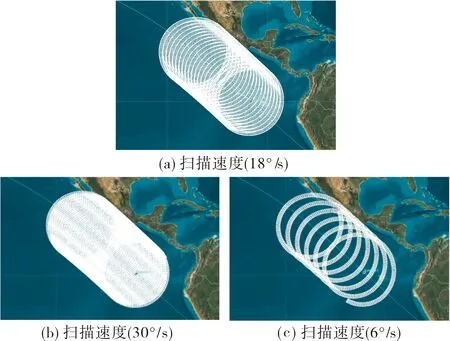
图9 不同扫描速度的覆盖范围Fig.9 The coverage of different scan speeds
3.2 验证结果
根据前文对环扫SAR成像模式的分析,利用合成孔径雷达成像的原理可以有效提升图像的分辨率,图10是某卫星利用环扫SAR成像模式获取到的数据验证结果,数据处理采用了子孔径的处理方法[10],图10为某梯田场景,图10(a)为实孔径处理结果,方位向分辨率约5公里,图10(b)为合成孔径处理结果,方位向分辨率提高至200 m左右。

图10 环扫SAR成像结果—梯田场景Fig.10 The results of the circular scanning SAR-imaging—terrace scene
图11为某岛屿沿岸海域内目标分布的图像,可以看出,经过合成孔径处理后,目标被聚合为一个点,利用图像数据可以对海上目标在广域范围内进行目标搜索与检测。

图11 环扫SAR成像结果—沿海场景Fig.11 The results of the circular scanning SAR-imaging—coastal scene
4 结论
传统的SAR成像雷达由于卫星速度快、重访周期等限制,难以获取大的成像幅宽,在广域搜索等应用领域无法发挥出优势,本文针对合成孔径雷达的特点,创新性的提出一种环扫SAR成像模式,通过分析环扫SAR成像的原理,得出环扫SAR成像的几何模型及最优覆盖设计,并分析了在环扫成像模式下的空间分辨率与成像幅宽的影响因素。通过具体的计算机仿真实例分析了成像幅宽及几何分辨率的变化关系,并给出了环扫成像模式的实际在轨验证结果。本文的工作目前主要集中在环扫成像雷达的工作原理及模式设计,后续工作希望针对此模式的具体应用及雷达工作性能参数开展研究。
