基于FPGA的转速信号采集系统设计与实现
2022-05-25廖晓宇黄新阳时培燕
廖晓宇 黄新阳 时培燕




摘要:在航空发动机转速控制系统中,转速信号的采集结果将影响着飞机控制的安全性。由于转速信号需实时监测,通过CPU直接进行频率采集将耗费极大资源,功耗也随之增大。本文设计了基于FPGA的转速信号采集系统,通过硬件调理转速信号后,送至FPGA使用高频脉冲计数法进行转速信号采集。针对转速脉冲信号出现高频异常干扰的情况,优化提出了检测处理异常干扰的方法,通过仿真及测试,验证达到了预期的采集精确度以及滤除异常高頻干扰的设计目标。
关键词:转速信号调理;转速信号采集;FPGA
一、引言
转速信号是航空发动机中控制的关键变量之一[1-3],当转速信号采集出现异常时将会引起转速控制的振荡,因而转速信号采集的准确性与稳定性极为重要[4-8]。
相较基于CPU的转速信号采集系统,FPGA集成规模与运算速度不断提升,具有并行处理的优点,运算速度提升的同时,能够降低功耗,减少CPU资源耗费。随着FPGA被应用于更多的控制领域,基于FPGA的转速信号采集系统应用愈加广泛[9-10]。
本文设计了基于FPGA的转速信号采集系统,首先对转速传感器采集的信息进行硬件调理,得到频率相同的方波信号,然后由FPGA对该方波信号进行处理,实现对转速信号的采集,采集精度可通过参数配置进行调节,最终采集结果可通过总线传送给CPU。
二、转速信号采集系统设计方案
转速信号采集系统原理框图如图1所示,主要包括转速信号调理电路、总线通信电路、FPGA、CPU,其中转速信号调理电路包括带通滤波电路、限幅电路、差分放大电路与滞回比较电路。
常用的转速传感器包括光电式、电容式、磁电式等,由于磁电式传感器结构简单且测量转速范围宽,航空转速传感器通常采用磁电式传感器,利用电磁感应原理将音轮齿的机械旋转而导致的磁场变化转化为电信号输出,因此转速传感器输出电压有效值与其采集频率成正比。转速电压信号先通过带通滤波电路进行滤波,带通滤波电路由低通滤波器与高通滤波器级联形成,高通滤波器中的隔直电容同时能够实现对地、对电源的保护,并且允许转速传感器输出信号过零的情况,本文选择合适的电阻与电容,将带通滤波电路的低频截止频率设置为需要采集最低转速信号的频率,高频截止频率设置为需要采集最高转速信号的1.2倍。限幅电路通过稳压二极管实现信号电压钳位,由此在传感器检测到过高频率信号时能够保护后级电路,防止后级电路因输入电压过高损坏。差分放大电路将传感器输出的电压信号进一步放大,增强采集信号幅值,同时提高电路的抗干扰能力。滞回比较电路将差分放大后的信号与参考电压进行比较,通过设置滞回区间,进一步滤波,防止波形不稳定导致的比较错误。
三、 转速信号采集系统硬件可编程设计
(一)高频脉冲计数法
航空转速传感器输出的电信号为正弦波信号,经由转速信号调理电路处理之后,成为标准方波信号送至FPGA。由于音轮齿制作工艺误差的存在,音轮齿每个齿的宽度以及相邻齿的间隔存在一定偏差,则对应每个齿所感应出的正弦波信号并不完全一致,调理得到的方波信号频率存在一定偏差。为了消除此项误差,本文采用高频脉冲计数法,将N个方波对应的时间段记为一个完整周期,如图2所示。在完整周期内对高频脉冲信号进行计数,将计数值count存储至寄存器,通过总线传输至CPU,由CPU软件通过公式(1)计算得到实时转速频率。
(1)
其中,
N——音轮齿齿数的整数倍个数,个;
f0——高频脉冲频率,Hz;
count——当前完整周期内高频计数个数,个。
(二)FPGA实现过程
本文系统时钟使用总线时钟,便于后续进行通讯,设置音轮齿齿数参数为NUM_GEAR,设置频率上下限对应计数参数N_LIM_HIGH与N_LIM_LOW,并同时对当前轮频率转速脉冲个数以及高频脉冲个数进行累计,待当前轮采集结束后刷新频率采集结果。
本文的转速信号采集的流程图如图3所示,首先进行上述参数配置,判断FPGA是否处于复位状态,若处于复位状态,则各寄存器保持复位初始值,若不处于复位状态,则对转速脉冲信号输入进行时钟同步处理。判断转速脉冲累计是否达到设定的齿数参数,若未达到则持续累计转速脉冲与高频脉冲数,若达到则刷新频率采集结果,并清除所有计数开始下一轮采集。此外,在当前轮采集结束时,将高频脉冲计数值与转速上下限参数进行比较,若转速超过上限值则记为上限频率,若转速低于下限值则记为0Hz。
(三)方法优化
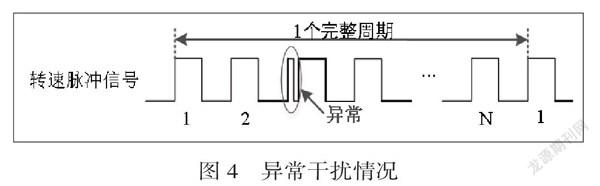
由于航空发动机的惯性很大,转速的变化较为缓慢,相邻转速脉冲信号对应的高频脉冲计数值不会产生过大的差异。当转速调理电路出现异常干扰时,可能会导致调理后的转速脉冲信号出现一个周期很小的方波,如图4所示,这将导致所累计的高频脉冲计数点数将少计一个正常转速脉冲信号所对应的点数,使得转速采集结果出现极大波动。为了进一步提高转速采集的可靠性,本文同时采集每一个单独的转速脉冲信号所对应的高频脉冲计数值,若出现上一个转速脉冲信号对应的高频脉冲计数值远小于当前转速脉冲信号对应的高频脉冲计数值,则忽略上一个异常转速脉冲信号对应的高频脉冲计数,后续继续正常采集。
四、FPGA仿真分析
本文对上述功能进行硬件可编程设计与仿真分析,得到以下结果。
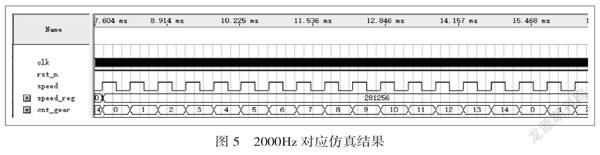
(一)将转速频率信号设置为2000Hz,进行仿真。
由图5可见,寄存器speed_reg的值为281256,即对于一轮采集,15个转速频率脉冲所对应采集到的高频脉冲计数值为281256,根据公式(1)计算可得转速信号频率为1999.957Hz,与真实输入的转速信号的绝对偏差为0.002%,满足航空发动机转速控制系统的要求。
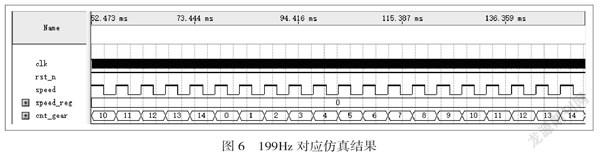
(二)将转速频率信号设置为199Hz,进行仿真。
由图6可见,199Hz对应寄存器speed_reg的值为0,证明当转速信号小于频率采集下限200Hz时,频率采集值记为0Hz,与设计相符。
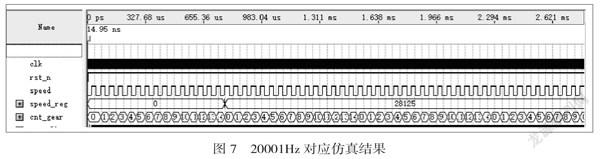
(三)将转速频率信号设置为20001Hz,进行仿真。
由图7可见,20001Hz对应寄存器speed_reg的值為28125,根据公式(1)计算可以得到转速信号频率为20000Hz,证明当转速信号大于频率采集上限20000Hz时,频率采集值记为20000Hz,与设计相符。
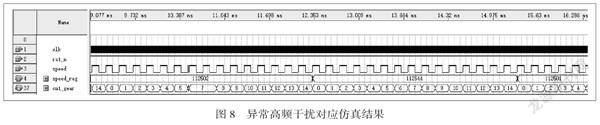
(四)将转速频率信号设置出现异常高频干扰,进行仿真。
图8中设置的正常转速信号为5000Hz,其中设置一个高频干扰,干扰信号周期远小于正常转速信号周期。通过图8,可以看到出现干扰信号前,转速采集高频脉冲点数为112502,根据公式(1)计算可以得到转速信号频率为4999.91Hz;当出现干扰信号,转速采集高频脉冲点数为112544,根据公式(1)计算可得转速信号频率为4998.0Hz;若未进行优化处理,则计数点数将为111043,计算可得转速信号频率为5065.6Hz。可见优化方法能够从算法上针对异常高频干扰进行滤除,防止转速采集信号出现较大波动。
五、结束语
基于FPGA的转速信号采集系统,实现了以下功能:
(一)能够实现对发动机转速传感器信号的硬件调理,获得相同频率的标准方波信号输入至FPGA进行处理;
(二)FPGA能够减少CPU资源耗费,准确采集转速信号频率,最大误差仅为0.002%。
(三)FPGA可以通过参数设置采集频率范围,当转速小于频率下限值时默认为0Hz,当大于频率上限值时默认为上限值。
(四)能够进一步提升可靠性,对于转速脉冲信号出现异常高频干扰时,通过FPGA滤去此干扰,避免干扰所导致的转速采集结果大幅波动情况。
作者单位:廖晓宇 黄新阳 时培燕 中国航空工业集团公司西安航空工业计算技术研究所
参 考 文 献
[1] 朱日兴. 转速传感器失效对发动机转速控制系统影响分析[J]. 机械工程与自动化, 2021, (03): 7-10.
[2] 王江南, 孟丽, 龙慧. 基于某型航空发动机三相交流测速发电机的转速测量[J]. 信息化研究, 2019, 45(05): 57-60.
[3] 段永彬, 赵立蕊, 张玉芝. 船舶涡轮式发动机瞬时转速预测方法研究[J]. 舰船科学技术, 2019, 41(10): 79-81.
[4] 何青林, 丁力, 卞立强. 航空发动机转速传感器的音轮优化方法研究[J]. 工业仪表与自动化装置, 2021(01): 93-96+99.
[5] 胡斌, 刘倩, 李雷, 等. 数字式火箭发动机涡轮泵转速测量方法研究[J]. 电子测量技术, 2017, 40(01): 175-179.
[6] 刘兵. 航空发动机测速电机低转速精准测量方法[J]. 工业技术创新, 2018, 05(06): 36-39.
[7] 岳永哲, 赵战民. 便携式汽车发动机转速测量仪的设计[J]. 仪表技术与传感器, 2019(02): 39-42.
[8] 王鸿鹏, 段发阶, 蒋佳佳, 等. 基于非谐波傅里叶变换的发动机转速测量系统[J]. 电力电子技术, 2020, 54(04): 57-60.
[9] 蒋文亮, 陆千里, 于真, 等. 一种基于FPGA的航空发动机独立超转保护系统[J]. 航空动力学报, 2016, 31(02): 477-483.
[10] 苗蔚, 张传森, 万实. 基于FPGA的飞机参数显示器转速信号采集设计[J]. 电子技术与软件工程, 2018(12): 101-102.
