基于RMPC的商用车车道保持跟踪控制
2022-05-17江浩斌林子晏花逸峰
唐 斌,尹 玥,江浩斌,林子晏,花逸峰,谢 军
(1. 江苏大学 汽车工程研究院,江苏 镇江 212013; 2. 江苏大学 汽车与交通工程学院,江苏 镇江 212013; 3. 江苏罡阳转向系统有限公司,江苏 泰州 225318)
随着我国交通运输业的迅速发展和公路网络的逐渐完善,作为公路运输主体的商用车由于运输负担重、驾驶时间长等因素时常出现偏离车道进而发生交通事故的现象,尤其是在中高速情况下,容易造成大量的人员伤亡和财产损失,其安全问题日益受到人们的关注[1].智能辅助驾驶是解决上述问题的有效途径,因此,商用车的智能辅助驾驶成为研究的热点,其中横向和纵向控制是智能辅助驾驶控制中的关键技术,车道保持智能辅助(lane kee-ping assistance,LKA)驾驶系统是横向控制中的重要组成部分[2].商用车车道保持能够很大程度上减少由于驾驶员疲劳驾驶或误操作造成车辆偏离车道引发的交通事故,可以提高车辆的行驶安全性.然而,目前车道保持智能辅助驾驶的研究多针对乘用车,商用车的车道保持智能辅助驾驶技术还不是很成熟.
在车道保持控制算法的研究过程中,常用的有模型预测控制(model predictive control,MPC)[3]、模糊控制[4]、滑模控制[5]等算法,其中,模型预测控制算法可预测被控对象动力学行为和处理多约束条件的优化问题,因而备受学者关注,其广泛应用在车辆控制研究领域.H. TAGHAVIFAR等[6]为了解决由于车辆标称侧偏刚度、路面附着系数、惯性参数和前向速度等参数不确定而导致路径跟踪性能下降的问题,提出了一种将滑模、模糊和神经网络结合的鲁棒自适应控制方法.顾青等[7]为解决车辆转向轮转角速度限制等系统约束条件导致自动泊车路径跟踪性能变差的问题,设计了基于非线性模型预测控制的自动泊车路径跟踪控制器.贾运红等[8]针对矿井车辆在巷道实时避障过程中转向角突然变化对矿井车辆结构和转向部件造成损伤的问题,设计了一种改进的基于空间模型预测控制(space model predictive control,SMPC)算法的矿井车辆避障控制器.
但是在基于MPC的控制中,系统模型描述不准确或存在外部扰动会导致MPC算法的鲁棒性较差.针对这一问题,学者提出了鲁棒模型预测控制(robust model predictive control,RMPC)算法,此算法可以有效提高系统稳定性,使优化结果更为精确.杨华等[9]针对线性多变量系统,在可能存在输入输出数据噪声的情况下,在子空间在线辨识基础上,利用不确定性模型更好地建模被控系统,结合鲁棒控制策略进行预测控制器的设计.王伟等[10]对于含有未建模动态的输入受限离散时间线性系统,当系统状态不可测时,提出一种基于状态观测器的鲁棒模型预测控制算法,该算法采用双模控制结构,将不变椭圆集同时应用于估计状态方程和误差方程,保证算法的稳定性和可行性.陈秋霞等[11]对一类输入输出受限的不确定离散时滞系统,研究了使得闭环系统渐近稳定且滚动时域性能指标在线最小化的鲁棒预测输出反馈控制器设计问题,基于预测控制的滚动优化原理,给出了输出反馈控制器存在的充分条件.
笔者搭建考虑纵向、侧向和横摆的三自由度非线性车辆动力学模型,对模型进行线性化和离散化处理得到鲁棒预测模型.利用线性矩阵不等式(linear matrix inequality,LMI)理论求解得到最优控制量.通过Trucksim/Simulink联合仿真研究直行工况和弯道工况的车道跟踪性能.
1 车辆动力学模型
1.1 车辆动力学建模
车辆动力学建模的目的是描述车辆的动力学特性,为鲁棒模型预测控制器的设计建立基础.考虑纵向运动、横向运动和横摆运动,设定车辆为前轮转向,建立三自由度非线性车辆动力学模型,如图1所示.

图1 车辆动力学模型
图1中,OXY为惯性坐标系,oxy为车辆坐标系,o为车辆质心位置.据牛顿力学第二定律,分别得到车辆质心沿x轴、y轴和绕z轴的受力平衡方程:
(1)
式中:m为车辆整备质量;φ为车辆的横摆角;Fxf、Fxr分别为前、后轮沿x方向的受力;Iz为车辆绕z轴的转动惯量;a为前轴到质心距离;b为后轴到质心距离;Fyf、Fyr分别为前、后轮沿y方向的受力.
在实际行驶过程中,车轮沿x、y方向的受力难以直接获得,因此需要通过计算得到,其转换关系如下:
(2)
式中:δf为前轮转角;Flf、Flr分别为前、后轮胎受到的纵向力;Fcf、Fcr分别为前、后轮胎受到的侧向力.
车辆坐标系与惯性坐标系之间各点的转换关系可表示为

(3)
由于车辆动力学模型中存在较多的三角函数,为了减少模型简化的计算量,作小角度假设,三角函数满足近似条件:
cosδf≈1,sinδf≈δf,tanδf≈δf.
得到基于前轮小角度和线性轮胎模型假设的三自由度非线性车辆动力学模型如下:
(4)
式中:Ccf、Ccr分别为前、后轮胎的侧偏刚度;Clf、Clr分别为前、后轮胎的纵向刚度;sf、sr分别为前、后轮胎的滑移率.
为了研究方便,将式(4)写为状态空间方程形式,即
(5)

1.2 车辆动力学模型线性化
由于线性时变鲁棒模型预测控制相对于非线性鲁棒模型预测控制计算量小,实时性好,而且非线性车辆动力学模型不能直接进行线性时变模型预测,因此,要对其进行线性化处理.
系统在任意时刻的状态和控制量满足如下关系:
(6)
式中:ξr为任意时刻的状态量;ur为任意时刻的前轮转角控制量.
在任意点(ξr,ur)处进行泰勒展开,只保留一阶项,忽略高阶项,可得
(7)
将式(6)与式(7)相减可得

(8)
式中:A(t)、B(t)为参数矩阵,
得到的连续状态方程不能直接进行预测,还需对式(8)进行离散化处理,得到线性离散状态空间方程:

(9)
2 鲁棒模型预测控制器设计
基于鲁棒模型预测控制算法的轨迹跟踪控制基本原理框图如图2所示,主要包含RMPC控制器、车辆模型和参考轨迹3部分.RMPC控制器通过预测模型得到目标函数和约束条件,根据设定的参考轨迹,即不同工况下的车道中心线,利用LMI进行最优求解,得到最优控制量u(k),输入到车辆模型中,车辆将下一时刻的状态量再次输入到RMPC控制器中进行最优求解.如此循环,构成鲁棒模型预测控制过程.
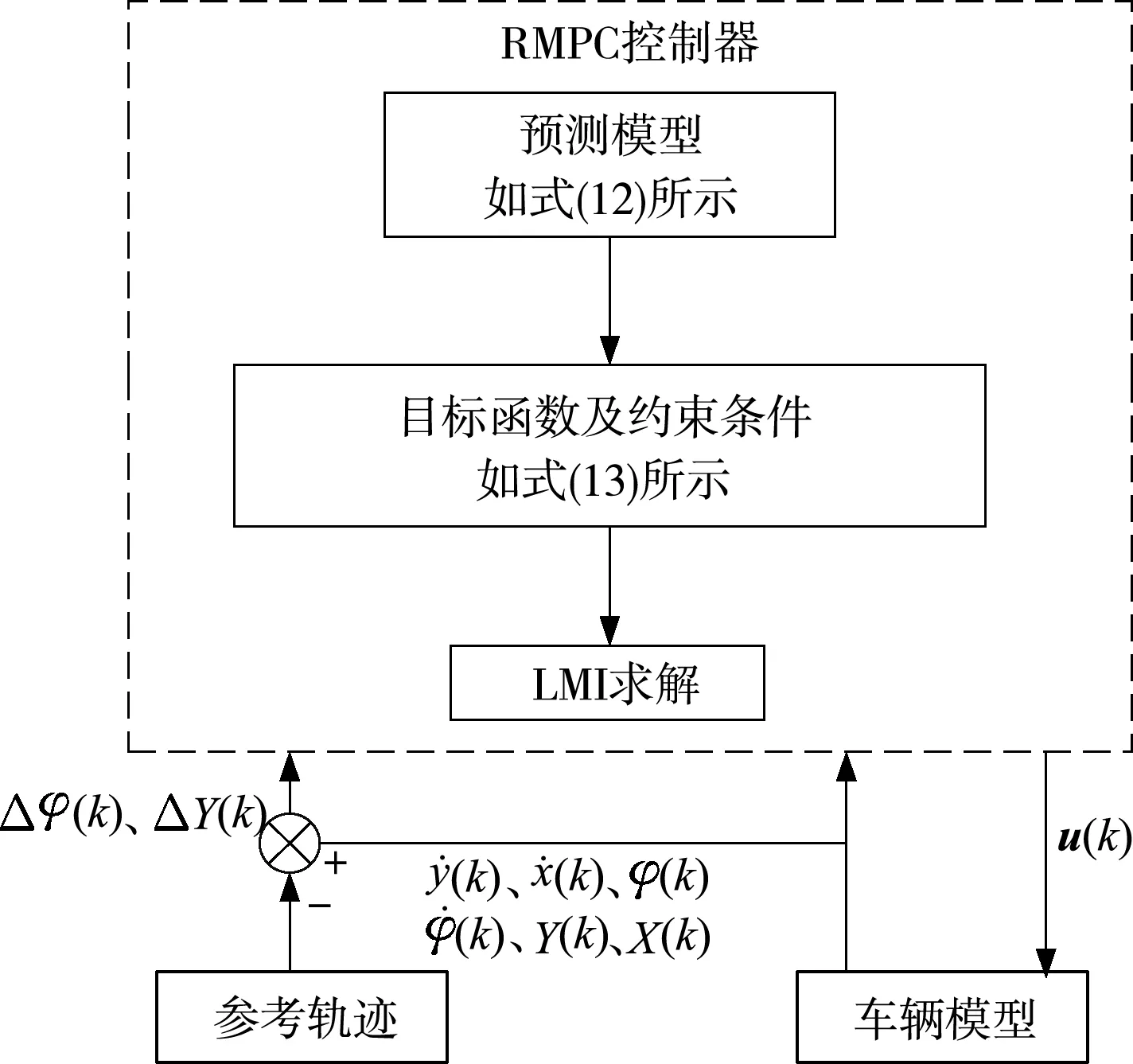
图2 基于RMPC的轨迹跟踪控制原理框图
2.1 目标函数设计
为了实现车辆快速且平稳地跟踪参考轨迹,并且保证控制量的稳定性,建立以路径偏差和控制增量为状态量的目标函数,同时加入松弛因子,防止出现无可行解的情况,即
(10)
式中:NP为预测时域;Nc为控制时域;η为输出量;i为预测步长间隔;k为当前时刻;ηref为参考输出量;Q为输出量权重矩阵;Δu为控制增量;R为控制增量权重矩阵;ρ为权重系数;ε为松弛因子.
计算未来某一段采样时间内输出量的值.

(11)

以当前k时刻状态量为基础,k+1,k+2,…,k+Np预测时刻的输出量为
(12)

2.2 约束条件的建立
为了保证车辆的行驶安全性,满足车辆执行机构需求,避免车辆出现侧翻等情况,需要对控制量和输出量进行约束,即
umin(k+j)≤u(k+j)≤umax(k+j),
j=0,1,…,Nc-1,
ηmin(k+j)≤η(k+j)≤ηmax(k+j),
j=0,1,…,Np.
为了满足乘车舒适性,实现控制量平稳变化,需要对控制增量进行约束,即
Δumin(k+j)≤Δu(k+j)≤Δumax(k+j),
j=0,1,…,Nc-1.
2.3 基于LMI的鲁棒模型预测控制器设计
结合上述目标函数和约束条件,将每一个采样周期内目标函数优化问题转化为如下形式:
(13)
式(13)的约束条件如下:
umin(k+j)≤u(k+j)≤umax(k+j);
Δumin(k+j)≤Δu(k+j)≤Δumax(k+j);
ηmin(k+j)≤η(k+j)≤ηmax(k+j);ε>0.
由于对目标函数直接优化的计算过程较为复杂,将系统的预测控制优化问题转化为线性矩阵不等式问题.
构造二次函数V(x)=xTPx,P≥0,假设V满足如下不等式:
V(η(k+i+1|k))-V(η(k+i|k))≤-(σ1+σ2),
(14)
式中:σ1=ηT(k+i|k)Qη(k+i|k);σ2=uT(k+i|k)Ru(k+i|k).
由于鲁棒性能指标函数有限,对于式(9)在终端零状态的情况下,有η(∞|k)=0;V(η(∞|k))=0,将此代入式(14)可得
-V(η(k|k))≤-J(k),
(15)
因此有

(16)
式中:A(k+i)、B(k+i)为状态空间系数矩阵;Ω为有效集.
由式(16)可知,V(η(k|k))为鲁棒性能指标的上界,需求得最优状态反馈控制律u(k+i|k)=Kη(k+i|k),其中状态反馈控制矩阵K=GP0-1,P0=γP-1(γ为常数),通过使V(η(k|k))上界最小化可得J(k)最小,从而有如下关系式:
V(η(k|k))+ε0TWε0≤γ,
(17)
式中:W为正定矩阵;ε0为软化因子.
将状态反馈控制律u(k+i|k)=Kη(k+i|k)代入状态空间表达式(9)可得
η(k+i+1|k)=(A(k+i)+
B(k+i)K)η(k+i|k).
(18)
将V(η(k|k))=ηT(k|k)Pη(k|k)代入式(14)可得
σ4-σ3≤-(σ1+σ2),
(19)
式中:σ3=ηT(k+i|k)Pη(k+i|k);σ4=ηT(k+i+1|k)Pη(k+i+1|k).
将式(18)代入式(19)可得
ηT(k+i|k)(μTPμ-P+Q+KTRK)η(k+i|k)≤0,
(20)
式中:μ=A(k+i)+B(k+i)K.
将式(20)化简可得
μTPμ-P+Q+KTRK≤0.
(21)
根据Schur补定理[12],式(21)等价于
(22)
将V(η(k|k))=ηT(k|k)Pη(k|k)代入式(17)可得
ηT(k|k)Pη(k|k)+ε0TWε0-γ≤0.
(23)
根据Schur补定理,式(23)等价于
(24)
综上所述,若式(22)在满足约束条件式(24)的情况下有解,则存在状态反馈控制律u(k+i|k)=Kη(k+i|k),使得V(η(k|k))最小.
3 仿真对比与结果分析
为了验证鲁棒模型预测控制器的控制性能,采用不同的仿真工况(直道工况和蛇形工况),对比鲁棒模型预测控制器与模型预测控制器的控制效果.仿真中的整车参数如下:m=3 650 kg;Iz=30 857.5 kg·m2;a=1.38 m;b=1.62 m;质心离地面高度为1.2 m;轮距为2.3 m;Ccf=85.0 kN·rad-1;Ccr=113.7 kN·rad-1.
3.1 直道工况
直道工况是检验车道保持控制算法纠偏能力的典型工况之一,在直道工况下仿真时,设置车速为50 km·h-1,初始横向位置偏差为0.5 m,对RMPC和MPC的路径跟踪性能进行对比,结果如图3所示.从图3a可以看出:车辆在MPC控制器下的车道保持,在行驶至15 m后完成;车辆在RMPC控制器下的车道保持,在行驶10 m左右已基本完成,横向位置偏差控制在0.01 m可接受范围内,相较于MPC,RMPC控制响应速度更快,调节时间减少了40.57%.从图3b可以看出:由于RMPC控制的响应速度更快,航向角变化也更加剧烈,但没有超出车辆失稳的界限,另外调节时间显著低于MPC控制,能够保证车辆能更快地回归车道中心线.由此可以看出RMPC控制跟踪精度更高,纠偏能力更好.
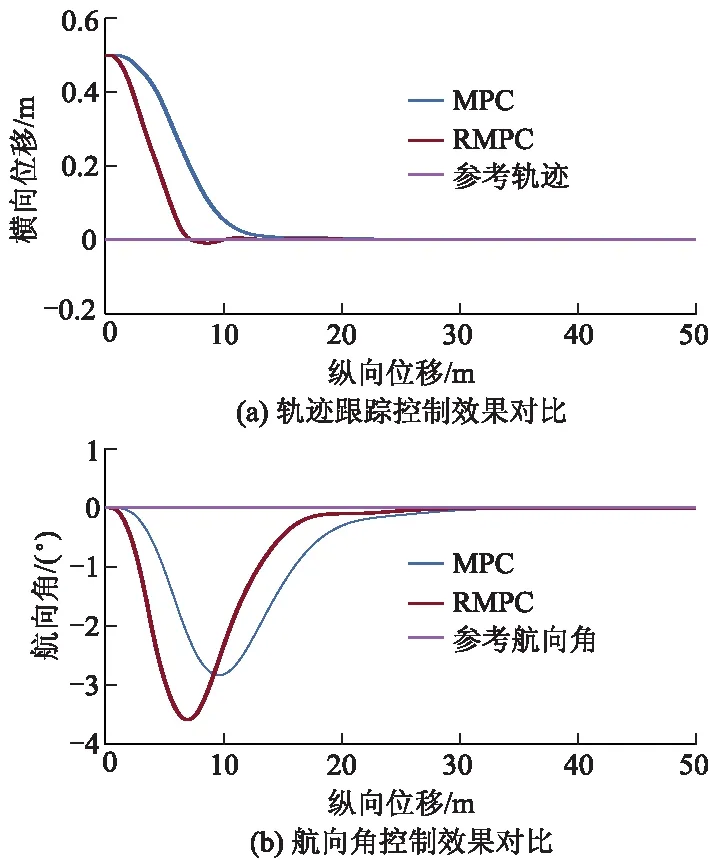
图3 直道工况下车速为50 km·h-1的控制效果对比
3.2 蛇形工况
蛇形工况用于检验车道保持控制在弯道中的跟踪性能和鲁棒性.在蛇形工况下仿真时,设置车速为50 km·h-1,控制效果如图4所示.
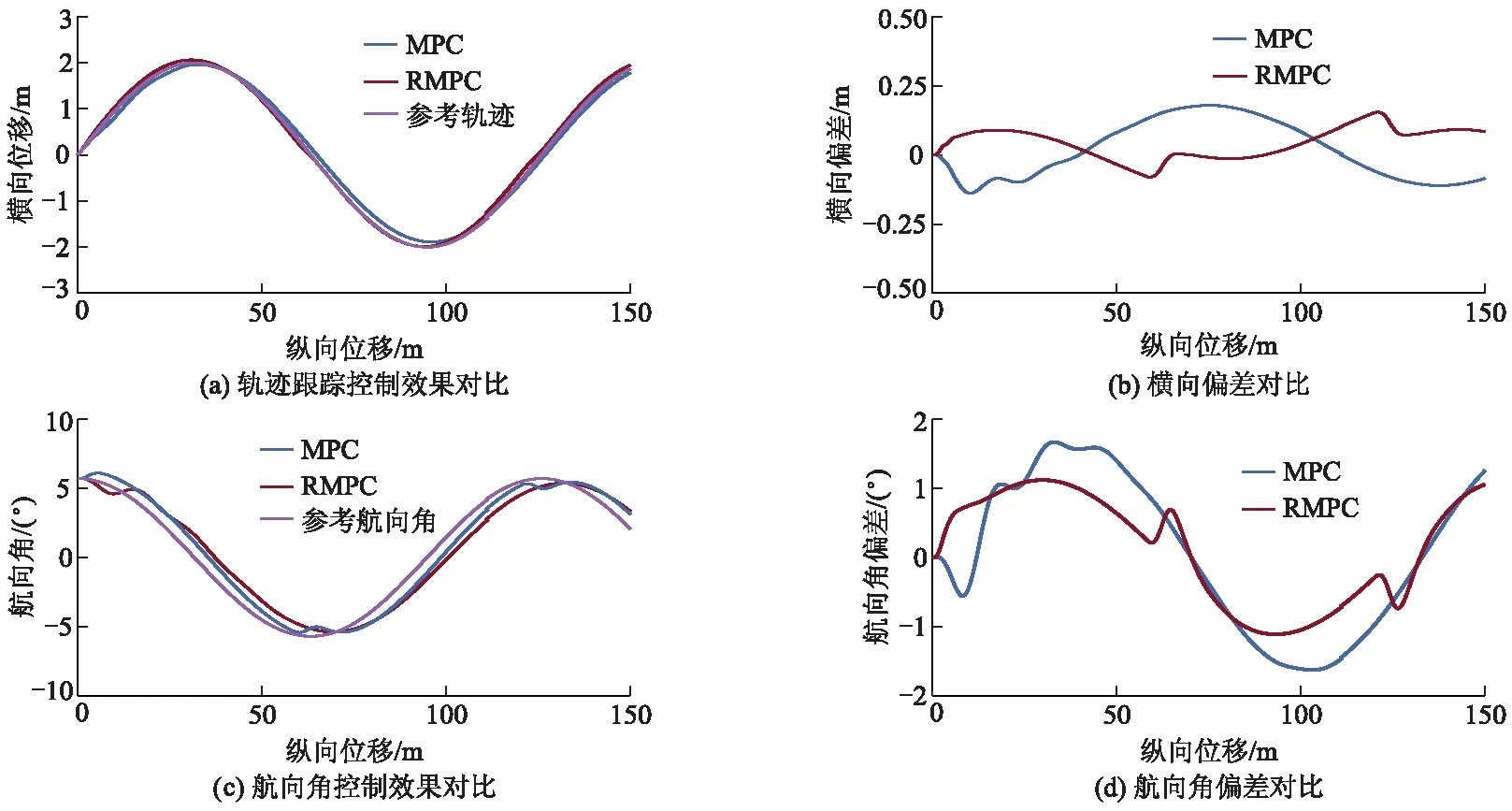
图4 蛇形工况下车速为50 km·h-1的控制效果对比
从图4a、b可以看出:车辆在MPC控制下的车道保持过程在弯道处横向偏差较大,跟踪精度不高,而车辆在RMPC控制器下的车道保持过程在弯道处横向偏差有所减小,横向路径偏差均值减少了29.4%,最大超调量减少了14.52%,跟踪精度更高.从图4c、d可以看出:车辆在MPC控制器下的车道保持,在车辆行驶的0~50 m内有一些抖动,车辆行驶稳定性较差,而车辆在RMPC控制器下的车道保持过程平稳性更好.
4 结 论
针对商用车车道保持控制精度不高的问题,在模型预测控制的基础上设计了鲁棒模型预测控制器.建立了三自由度车辆动力学模型,通过对模型的线性化和离散化处理得到了线性离散车辆动力学模型,在此基础上,以横向路径偏差和航向角偏差作为输出量,前轮转角作为控制量,设计了鲁棒模型预测控制器,建立min-max目标函数并设定约束条件,利用线性矩阵不等式LMI理论求解最优化问题.在Trucksim/Simulink仿真平台上对直道工况和蛇形工况进行联合仿真,结果表明:相比于模型预测控制,鲁棒模型预测控制的响应更快,路径跟踪精度显著提高,鲁棒性更好.
