混合现实电磁术中导航技术在神经外科手术中的应用
2022-05-11赵振宇陈凌刘嘉霖孙国臣鲁通王健沈少平张治中李云利李鑫白玉名潘吉鑫熊远毅沙洪飞余新光
赵振宇,陈凌,刘嘉霖,孙国臣,鲁通,王健,沈少平,张治中,李云利,李鑫,白玉名,潘吉鑫,熊远毅,沙洪飞,余新光
现代神经外科手术理念是精准切除病变且最大程度保护神经功能, 因此导航在神经外科术中应用不可或缺。混合现实技术(mixed reality,MR) 是应用计算机将影像学资料生成虚拟图像并与现场的真实场景叠加,实现虚拟与真实场景的互动。本研究通过应用混合现实多模态导航系统技术对2018年5月—2018年6月解放军总医院神经外科收治的4例病例制定手术方案并实施术中导航,现报告如下。
1 资料与方法
1.1 一般资料 共纳入4例患者,其中男2例,女2例,诊断分别为脑膜瘤、胶质瘤、颅内淋巴瘤、脑脓肿(表1)。治疗方案申请并获得解放军总医院伦理委员会批准,4例患者均被告知并签署参与研究的知情同意书。

表1 患者临床资料和病理结果
1.2 影像学数据获取 头颅影像原始数据(西门子GE 64排螺旋CT,西门子1.5 T术中MRI) 通过院内网PACS软件系统获取。CT普通平扫层厚5 mm,CTA数据层厚0.5 mm,颅骨数据层厚2 mm,MRI数据层厚1 mm。数据格式为 Dicom。
1.3 混合现实图像重建和导航 患者头部带4-6枚脂溶性标记物,术前行颅脑MRI扫描,混合现实导航系统术前使用自研工作站软件(StarSource V1.0 Beta),通过患者的Dicom数据重建出病灶部位的多模态三维解剖模型,含有皮肤、颅内动静脉以及病变结构,应用弥散张量成像技术重建锥体束、视放射及弓形束等神经结构,导航计划输入导航系统(Medtronic StealthStation i7),生成手术计划文件(v3d)。手术前将手术计划文件传到自研手术室客户端(StarNav V1.0 Beta)软件中并运行导航软件。将磁导航设备的磁场发射器(加拿大NDI,Aurora)摆放到患者头部边缘,距离不超10 cm,在患者对侧颞部粘附配套的六自由度追踪部件(NDI,Part Number 610066),使用六自由度探针工具(Part Number 610065)完成点注册。术者佩戴Hololens眼镜(Microsoft,美国微软)将虚拟的全息图像融合叠加于患者头部,并将导航影像投射到手术显微镜(德国OPMI Pentero,Carl Zeiss) 用来辅助手术。术前术中导航定位均同时应用德国博医来(BrainLab)导航系统进行同步对照验证(图1)。
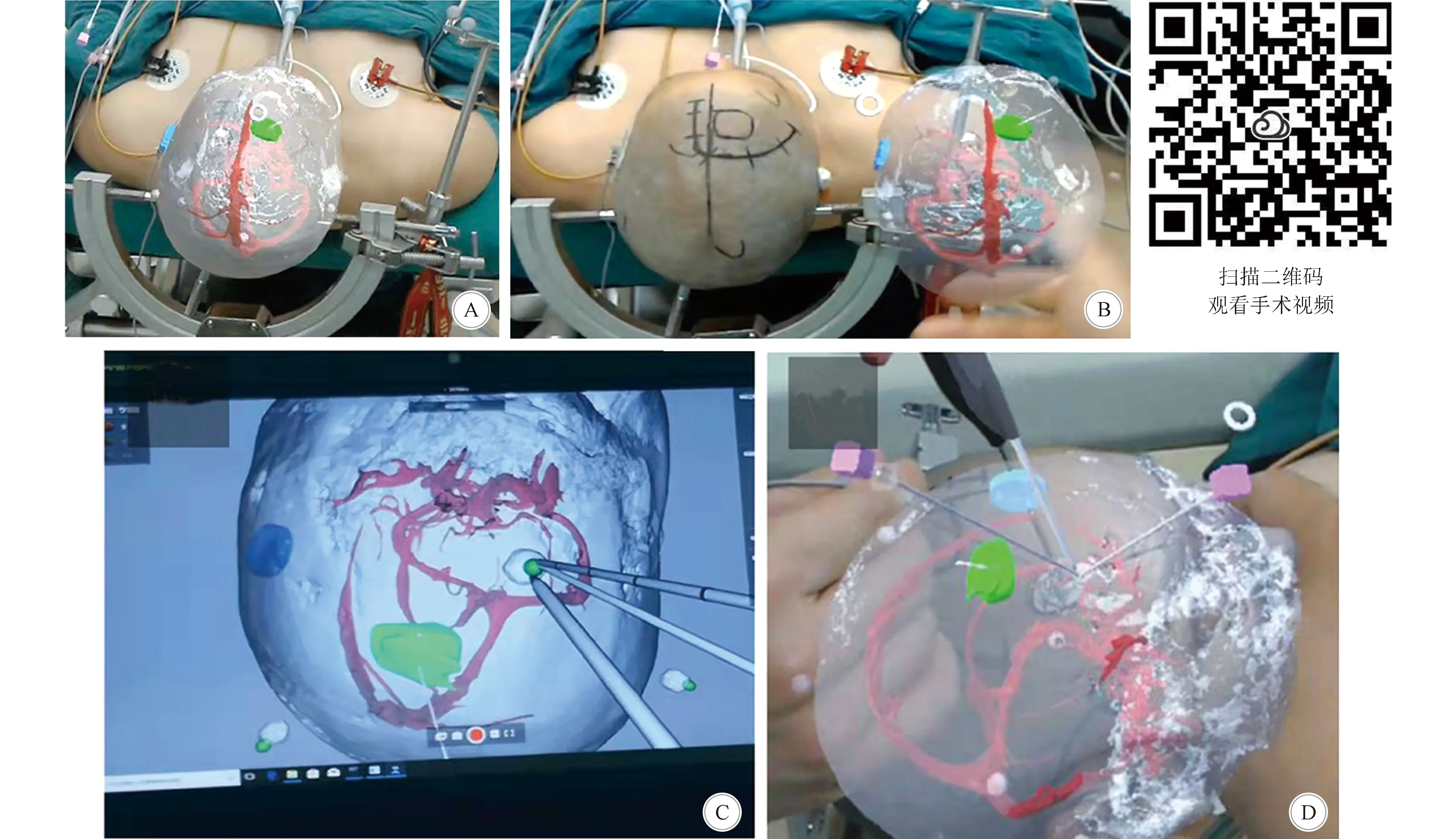
A:混合现实神经外科术中导航系统重建的虚拟3D病变; B:根据术者习惯可以移动虚拟3D病变图像; C:显示两种导航结果的一致性; D:混合现实神经外科术中导航与BrainLab导航结果一致
1.4 手术方法 4例神经外科患者术前均使用混合现实神经外科导航系统重建病变,设计手术切口和选择手术入路,并在全麻气管插管下顺利完成手术。
2 结 果
4例患者均成功进行术前计划并顺利完成手术。同时应用BrainLab导航病变的边界,结果与MR导航结果完全吻合。应用MR导航技术实施2例深部病变的手术导航,手术情况及术中术后复查现实MR导航位置准确。患者术后未出现新发症状,无手术相关并发症,均按时出院。
2.1 病例1 患者女,50岁,因头痛1个月入院,神经系统查体无阳性体征。术前MRI检查示右额部肿瘤,大小约2.4 cm×2.1 cm,与硬脑膜关系密切,局部可见“鼠尾征”。患者进入手术室后在术中磁共振检查室完善术前MRI检查,患者进行插管麻醉的同时,术者进行数据处理,配准重建三维图像并导入导航系统i7,术者佩戴Hololens眼镜可见绿色肿瘤的三维虚拟图像和红色的脑静脉系统图像,颅骨及头皮透明化。根据肿瘤在头部的投影,采取右额部弧形切口(图2),同时BrainLab导航进行定位表明两种导航结果一致,进行开颅手术证实导航定位准确,铣开骨瓣见硬脑膜与骨瓣粘连紧密,切开硬脑膜见肿瘤灰白、质韧,显微镜下全切肿瘤及其基底硬脑膜,取骨膜修补硬脑膜,磨除增生及破坏的颅骨内板,逐层关颅。术后患者无新发神经功能症状。CT 提示术区无明显出血,术后1周伤口拆线出院。病理报告为脑膜瘤,WHO Ⅰ 级。随访患者现无不适主诉及阳性体征。
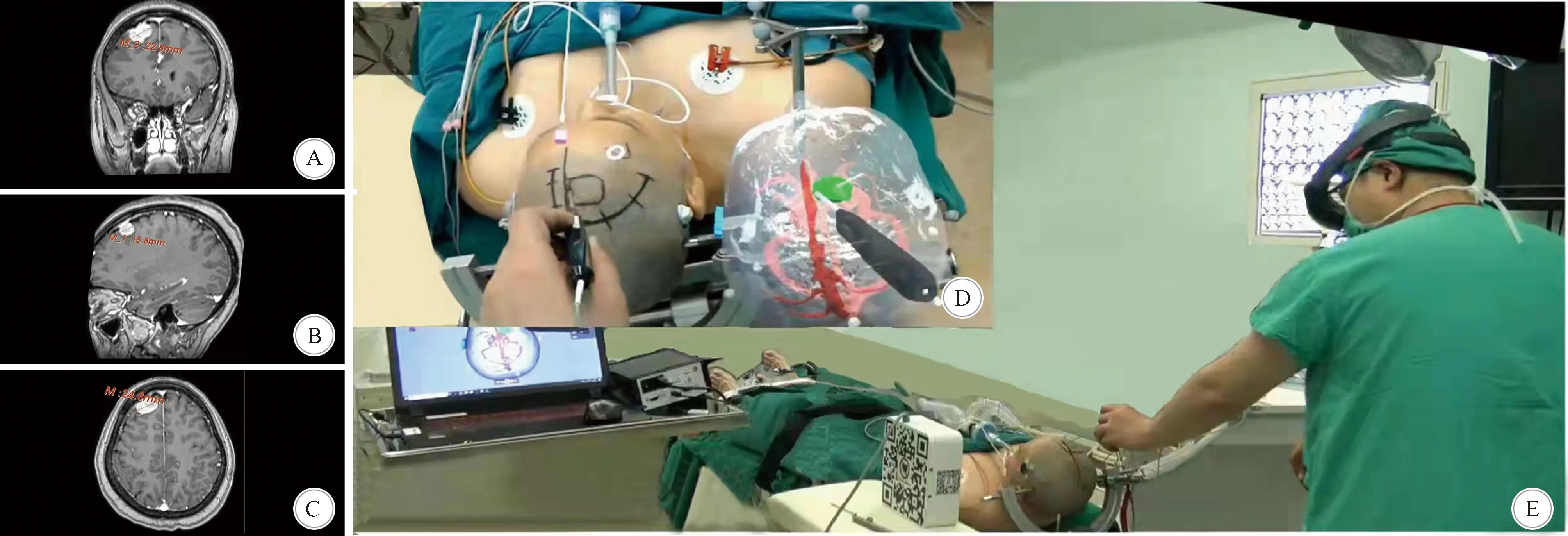
A:1.5 T T1增强MRI图像冠状位; B:矢状位; C:轴位; D:术者佩戴HoloLens 眼镜可见3D图像; E:根据混合现实神经外科术中导航系统标记的病变,设计脑膜瘤手术皮瓣,绿色代表脑膜瘤,用红色标记静脉窦和动脉
2.2 病例2 患者男,40岁,因头痛半个月入院,神经系统查体无阳性体征。术前MRI检查示右额叶占位性病变,大小约6.5 cm×5.4 cm,混杂T1,长T2,增强见环形强化和囊变,累及胼胝体。术者重建MR图像并导入导航系统i7,佩戴Hololens眼镜可见绿色肿瘤的三维虚拟图像,静脉系统标记为紫色,脑室系统标记为浅蓝色。BrainLab导航进行定位表明两种导航结果一致,术者应用MR多模态导航标记肿瘤体表投影,采取右额部弧形切口(图3),铣开骨瓣后神经电生理监测定位中央沟等功能区,额中回造瘘分块切除肿瘤,灰白、质软,显微镜下按计划全切肿瘤。术后患者无新发神经功能症状。复查颅脑CT未见出血,术后 1 周伤口拆线出院。术后报告为胶质母细胞瘤,WHO Ⅳ级。患者因肿瘤复发于2021年1月死亡,生存时间32个月。

A:1.5 T T1增强MRI图像冠状位; B:矢状位; C:轴位; D:根据混合现实神经外科术中导航系统标记的病变,设计胶质母细胞瘤手术皮瓣; E:重建3D混合现实图像,绿色标记病变,静脉窦和动脉用紫色标记,浅蓝色标识脑室
2.3 病例3 患者男,58岁,因头痛伴右侧肢体肌力减弱1周入院,查体:颅神经未见明显异常,右侧肢体肌力Ⅲ级,感觉无异常,余神经系统查体无阳性体征。术前MRI检查示左侧丘脑肿瘤,病变大小约4.1 cm×3.7 cm,等T1长T2,增强见均匀强化,考虑颅内淋巴瘤可能性大。术者重建MR图像并导入导航系统i7,佩戴Hololens眼镜可见绿色肿瘤的三维虚拟图像,红色动脉系统,紫色静脉窦和浅蓝色脑室系统。BrainLab导航进行定位表明两种导航结果一致,按照MR导航系统选择左颞部直切口,颅骨钻孔后,术者在Hololens眼镜中可直观选择避开脑血管的最佳穿刺路径,用Varioguide无框架立体定向系统取肿瘤组织活检,穿刺针到达MR导航活检位置后吸取8条病变组织,注入0.5 mL空气后撤出穿刺针。术中MRI显示穿刺活检位置理想,无出血损伤(图4)。术后患者右侧肢体肌力Ⅳ级,术后1周伤口拆线。术后病理为弥漫大B淋巴细胞瘤,转血液科行化疗。随访患者现无不适主诉,四肢肌力感觉无明显异常。
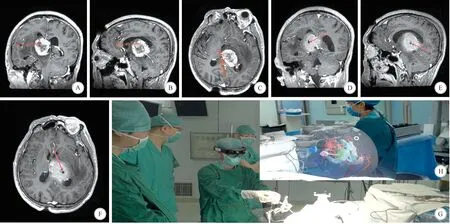
A:1.5 T T1增强MRI图像冠状位; B:矢状位; C:轴位; D:活检后术中MRI 冠状位; E:矢状位; F:轴位; G:应用混合现实神经外科术中导航系统进行淋巴瘤活检; H:重建3D混合现实图像,粉色标识穿刺的方向和位置,绿色标识病变,红色标识动脉,紫色标识静脉窦,浅蓝色标识脑室系统
2.4 病例4 患者女,44岁,因左侧肢体无力1周入院,查体:左侧肢体肌力0级,感觉无异常,左侧病理征阳性。术前MRI检查示右额叶占位性病变,病变大小约5.2 cm×4.1 cm,环形强化,诊断为脑脓肿。术者进行MR图像重建并导入导航系统i7,佩戴Hololens眼镜可见黄色脑脓肿的三维虚拟图像,可见红色动脉系统,紫色静脉窦和浅蓝色脑室系统的三维虚拟图像。BrainLab导航进行定位表明两种导航结果一致,选择右额部冠状缝直切口,应用MR多模态导航引导下钻骨孔,十字切开硬脑膜,避开蓝色静脉穿刺针沿导航方向进针4 cm到达脓腔,可见引流管内黄色浓稠液体流出,万古霉素盐水反复冲洗引流,放置引流管后逐层缝合(图5)。术后患者左侧肢体肌力Ⅳ级,术后1周伤口拆线。脓液培养结果为肺炎克雷伯菌,术后给予美洛培南,利奈唑胺等药物治疗。随访患者现无不适主诉,四肢肌力感觉无明显异常。

A:1.5 T T1增强MRI图像冠状位; B:矢状位; C:轴位; D:应用混合现实神经外科术中导航系统行脑脓肿引流术,黄色标识脑脓肿,红色标识动脉,蓝色标识静脉窦,浅蓝色标识脑室系统
3 讨 论
神经系统解剖相对复杂,现在手术越来越重视保护神经功能,减少术后并发症[1],因此精确导航在神经外科手术中的应用越来越广泛。神经导航可以融合MRI、MRA、MRV、DTI等多种影像数据,实现快速地图像重建[2]。术者可以通过标注病变、脑组织、血管、神经传导束等结构的图像,明确病变位置及与周围结构的相互关系[3],并可将手术计划传输到导航工作站实现术中定位功能。
但现有光学神经导航设备价格昂贵且操作过程比较复杂,很多医院未普及使用。现有光学导航结果在显示器中通常是平面图像,即使三维重建的图像也是显示为降维的二维图像,术者需要在脑海中转化为3D位置关系并与患者真实解剖体位相对应,这依赖术者丰富的解剖知识及手术经验。如果术中根据体位需要进行手术床角度调整、调整手术入路角度,病变角度及位置发生相应的改变时,需要术者重新在脑中构建患者解剖相对位置。这需要通过长时间反复训练,而且可能存在不规范化、不标准化,不易学习掌握的缺点。常规导航需要术者将视线从术区转移到监视器,这种转换过程加长了手术时间,来回转移视线也增加手术风险。混合现实相对价格便宜易于操作,可成为没有配备光学导航单位的备选技术。
MR技术通过生成虚拟图像并投射到手术现实环境中,可直观地可视化显示出患者的病变,因此已应用于骨科、肝胆外科、泌尿外科等手术中[4-13]。神经外科应用MR技术可直接将病变、头皮、颅骨、神经纤维束、脑室、血管等结构三维可视化,并可通过测量病变与解剖标志物之间的距离进行术中导航[12-13]。
在本研究中,应用MR多模态导航系统为4例患者设计手术入路并实施术中导航,获得较理想的效果,总结体会:(1)MR重建的虚拟图像直观可视化在手术环境中可与患者完全重合,较现有的光学导航无需术者根据导航图像在脑中重建三维图像,也无需术者反复抬头看导航显示器,减少视线和注意力在术区和导航监视器间转换;(2)设计手术入路时,可在手术环境中将重建的图像与患者头部叠加,达到混合现实的效果。术中可直接看见病变在患者头部的投影,患者病变、皮瓣、骨瓣可视化直观清晰,根据病变可快速勾画出其边界(图2D)。手术切口较常规导航简单易行,较传统光学导航勾画病变时反复确认病变边界的时间少;(3)对于深部或功能区的病变,MR导航可让术者直观客观地看清楚术区的解剖关系,便于术前制定手术方案,如磨除颅骨的范围,切除肿瘤时皮层造瘘的位置。术中根据肿瘤与锥体束、重要血管、脑室等的关系指导手术,图像直观可视化避免主观判断的误差,尽可能最大程度切除病变且减少神经功能损伤[11];(4)对于深部穿刺活检的患者,MR导航可直观全息地呈现出病变及临近周围的解剖结构,为术者提供了科学安全的穿刺路径[14]。如病例3淋巴瘤穿刺活检,通过MR导航可直视淋巴瘤周围的血管,避开血管设计穿刺路径(图4H)。病例4通过MR术中导航技术可显示出脑脓肿壁后方的一条血管(图5D),如果没有MR导航技术提供虚拟图像和导航,仅用传统光学导航时,术者很难发现深部病变的血管位置,也不容易选择最佳穿刺角度避开血管,极可能产生术后血肿等手术并发症。
此外MR导航技术具有直视全息的优势,可用于术前谈话,以更好地让患者及家属理解病情和手术风险。同时也可改变传统的外科医师培训学习模式,提高医师成长速度[15-16]。但是该技术也具有神经导航系统的缺陷,在手术过程中会出现“脑漂移”问题。此时术者可辅以术中MRI,术中超声等实时成像在某种程度上进行纠正偏差[17-19]。由于本研究例数较少,暂时不能得出影响疗效的结论,但是随着病例积累和技术升级,今后MR导航可实现光、电磁混合导航技术并与手术机器人相结合,在神经外科手术中有更广阔深远的应用价值。
利益冲突:所有作者均声明不存在利益冲突。
