基于改进人工蜂群算法的无线电能传输系统输出控制
2022-04-19杨晶菁
杨晶菁,陈 为
(福州大学电气工程与自动化学院,福州 350116)
随着功率半导体开关器件、功率变换技术和现代控制理论的发展,以及人们对消费类电子设备便携性和灵活性的需求,无线电能传输技术受到了极大关注。2007 年麻省理工学院学者首次提出了磁耦合谐振式无线电能传输MCR-WPT(magnetically coupled resonant wireless power transfer)技术,成功点亮了距离2 m 的60 W 灯泡[1]。2017 年斯坦福大学学者提出并实现了一种非线性宇称时间对称无线电能传输系统,在1 m 内任何位置实现恒定效率的电能传输[2]。MCR-WPT 技术是一种通过电磁效应和能量交换作用实现从电源到负载无导线接触传能的新型输电方式,具有方便灵活、环境适应性强、安全可靠等优点[3],广泛应用于电动汽车、便携式移动设备、植入式医疗设备等领域。
目前主要采用提高耦合系数[4]、频率跟踪控制[5-6]、多自由度拾取[7-9]、最大功率点/效率点跟踪[10]等方法提高系统输出性能。其中调频控制由于其控制方式简单可靠易于实现,被广泛地应用于调节频率范围不大的系统中[11],可分为硬件调频和软件调频两大类。硬件调频方面,文献[4]通过改变收发线圈结构抑制频率分裂,提高系统传输效率,但线圈结构复杂,增加了理论分析的难度。在实际应用中,通过对工作频率进行检测和控制的软件调频也是稳定系统输出性能的有效手段。软件调频的硬件简单可靠易于实现,主要依靠智能算法的先进性获得合适的工作频率。随着微处理器计算速度的提高、功率开关器件和算法理论的发展,这是一种性价较高的改善系统输出性能的方法。
MCR-WPT 系统输出性能主要包括输出功率和传输效率。若电源、线圈、补偿电容和负载等参数确定,二者都是线圈间耦合系数k 和系统工作频率f的函数。随着k 的增大,MCR-WPT 系统输出功率出现频率分裂现象,即输出功率在谐振频率两侧的本征频率处取得局部极大值。由于系统存在频率分裂现象,需及时调整f 使得系统输出最优的输出功率。同时MCR-WPT 系统输出功率的极值个数和极值间的距离都会随k 改变。因此MCR-WPT 系统的输出功率是一个极值的个数和半径都可变的多峰函数,系统的输出控制问题可转换为该多峰函数的优化问题。文献[12]将多目标遗传算法用于系统的输出功率优化,通过优化全桥串联谐振变换器的开关频率并同步全桥整流的输出电压,实现了频率跟踪控制,最大化系统传输效率,但多目标优化算法较复杂,不利于实际系统的实时控制;文献[5]采用改进的蚁群算法实现自适应频率跟踪控制,提高并稳定了过耦合时系统的输出功率和传输效率;文献[6]利用种群“早熟”程度评价指标来自适应调整遗传算法控制参数的方法,提高了系统谐振频率的发现速度。但文献[5-6]的算法都只能搜索到全局最优值。
目前收敛于全局最优的智能算法如遗传算法、粒子群算法、免疫算法、蚁群算法等可通过采用排挤机制和共享适应值的小生境技术[13-14]、聚类分析等方法改进后实现多峰函数的优化。文献[15]中策略2 对与峰相似的个体采用较大的变异概率以提高算法的搜索能力,但峰半径的改变对算法搜索能力影响很大,预先设定峰半径,选取不当时易丢失局部最优值。2005 年Karaboga D[16]提出了人工蜂群算法ABC(artificial bee colony algorithm),具有设置参数少、收敛速度快和解的精度高等优点。但是标准ABC 只能找到全局最优值,无法搜索到所有的极值。文献[17-19]提出改进的ABC,证明可在食物源初始化、确认小生境半径、选择策略、食物源评价方式等方面对标准ABC 进行改进,使其可以搜索到所有极值,并可以提高多峰函数优化时的速度和精度。
采用软件调频方法实现MCR-WPT 系统的输出控制,需要根据不同的k 对f 进行实时调整,以获得最优输出性能。因此,首先应对系统建模得到输出功率和传输效率的函数,再采用多峰函数优化算法搜索到输出功率函数的所有极值并得到对应的频率,最后结合传输效率选择获得最优输出性能的频率。本文首先分析了MCR-WPT 系统的电路模型,说明了输出功率的频率分裂现象和多峰特性,并指出搜索所有极值的必要性。接着提出原边控制方法得到特定k 时系统输出功率和传输效率以f为变量的函数。然后将输出控制问题转换为多峰函数的优化问题,通过改进标准ABC 实现多峰函数所有局部极值的快速搜索。最后通过仿真和实验证明该算法的有效性。其中对ABC 改进有如下3 个方面:
(1)改进食物源的初始化方法,用正交生成法代替均匀随机数生成法初始化食物源,有利于加快算法的收敛速度。
(2)改进子代代替父代的选择方式,由原先的父代直接与子代比较,改为通过比较父代与子代之间的欧式距离选择食物源,避免漏峰。
(3)提出一种动态更新小生境边界的方法,通过对适应度值排序确定个体适应值的增量,动态地缩小小生境的范围,提高算法的收敛速度。
1 MCR-WPT 系统输出控制
两线圈MCR-WPT 系统电路模型如图1 所示。图中:U0和R0分别为电源开口电压有效值和内阻;US和UL分别为系统输入和输出电压有效值;R1和R2分别为发射和接收回路的等效电阻;L1和L2分别为发射和接收线圈的等效电感;C1和C2为谐振补偿电容;M 为发射和接收线圈的互感系数,M=;ZL为负载等效阻抗,ZL=RL+jXL;Z2为副边的等效阻抗;Z1为从发射线圈侧看进去的等效阻抗;Z 为从电源侧看进去的等效阻抗;I1和I2分别为发射和接收回路的电流有效值。

图1 两线圈MCR-WPT 系统电路模型Fig.1 Circuit model of 2-coil MCR-WPT system
根据电路的基尔霍夫定理,可得

式中,ω 为工作角频率,ω=2πf。
由式(1)可得发射和接收回路的电流I1和I2,计算MCR-WPT 系统输出功率PL和传输效率η,得

由于环境和技术的限制,每次充电时发射与接收线圈间的距离各不相同,但是一旦充电开始,线圈间的距离一般保持不变,即k 不变。因此可根据式(2)作出不同k 值对应的输出功率曲线,如图2所示。当k=0.25 时,系统处在欠耦合状态,输出功率在f0处取得最大值;当k=0.5 和k=0.88 时,系统进入过耦合状态,输出功率在f1和f2上取得局部极大值,而在f0处的值却较小。可见MCR-WPT 系统对工作频率的变化十分敏感,且当系统处于过耦合状态时存在多个功率最大传输频率,即系统的输出功率呈现多峰特性。实际应用中,系统常工作在强耦合区,若工作频率始终保持不变可能导致其偏离谐振频率即失谐,严重影响电能的传输[20]。

图2 两线圈MCR-WPT 系统的输出功率特性Fig.2 Output power characteristics of 2-coil MCR-WPT system
目前一般采用优化算法搜索到一个使得系统输出功率最大的工作频率。在实际应用中,如果为了追求全局最优的输出功率,在短时间内大幅度地调整系统工作频率,可能会因为电路的滞后性使得系统进入失谐状态,严重的可能会由于电流过大而损坏系统。考虑到系统的稳定性,提出的输出控制方法首先通过优化算法搜索到输出功率所有极值并得到其对应的频率,再兼顾系统的传输效率选择合适的工作频率,可稳定输出性能并避免失谐。
目前常用的控制方式包括半控式和全控式。其中全控式需要通过检测负载侧的电压和电流,并由无线通信模块传输至原边控制器侧。考虑到系统的实时性,本文采用半控式的原边控制,仅通过检测发射线圈回路的参数,计算系统的输出功率和传输效率。由于该系统参数较多且在高频下易相互影响,需通过理论分析与实验测量相结合的方法得到系统的数学模型,具体方法如下。
(1)设定系统的工作角频率范围,测得线圈等效电感L1和L2、补偿电容C1和C2以及负载ZL。
(2)测得发射回路中电源电压US、发射线圈回路电流I1以及其相位差,φUI=φU-φI。
(3)根据互感模型,由式(3)求得系统各部分阻抗及阻抗角分别为

(4)由原边等效阻抗Z 阻抗角φZ等于原边电路总电压与总电流的相位差φUI,可以计算出M。
(5)求得发射与接收线圈电流分别为

并由式(2)求得系统输出功率和传输效率。采用以上方法得到输出功率和传输效率是在特定k 下的f函数,其中输出功率函数可能包含一个或两个极值。输出控制问题需要搜索该函数的全部极值,以选择合适的工作频率。因此该问题转换为多峰函数的优化问题,要求寻优算法能搜索到所有极值,且计算量小、收敛速度快、结果准确。本文采用改进的ABC 实现。
2 标准人工蜂群算法
ABC 是模仿蜜蜂行为的一种优化方法,是集群智能思想的一个具体应用,收敛速度较快。标准ABC 模型包含了3 种核心元素:雇佣蜂、非雇佣蜂和食物源,其中非雇佣蜂包括观察蜂和侦查蜂。假设问题的解空间是D 维,食物源、雇佣蜂和跟随蜂的个数都是SN。标准的ABC 将优化问题的求解过程看成是在D 维空间中进行搜索,D 同时也是待优化参数的个数。MCR-WPT 系统输出控制问题待优化的参数是f,因此D 为1。算法流程如下。
步骤1随机生成SN个食物源,组成食物源集F1,表示为

式中,xmin,j和xmax,j分别为最小和最大边界值。对应输出控制问题,即生成SN个[fmin,fmax]范围内的f 组成F1。
步骤2雇佣蜂在F1内搜索,对F1内已有的食物源的位置进行修正,组成F2,过程表示为

计算与食物源蜜量成正比的适应度fit(xi),即

对应输出控制问题,即依据式(6)对F1内的f 进行修正组成F2,并计算对应的输出功率PLi作为式(7)中的fi,再计算适应度。
步骤3观察蜂计算其选择雇佣蜂的概率,即

按照轮盘赌方式产生F3。取F2和F3中适应度较优的食物源作为F1,并记录全局最优解。对应输出控制问题,即依据式(8)组成F3,并选取F2和F3中适应度较优的f 作为F1,并记录全局最优的f。
步骤4为防止算法陷入局部最优,当某食物源迭代limit 次没有改进时,便放弃该食物源。同时该食物源对应的雇佣蜂转变为侦查蜂按式(5)随机产生一个新的食物源代替原食物源,并更新F1。
步骤5从步骤2 开始重新搜索F1,直至满足终止条件。
由步骤3 可知,标准ABC 仅能得到输出功率全局最大值时对应的频率,当MCR-WPT 系统发生频率分裂现象时,该频率可能并非对应系统最优的输出性能。因此需要对标准ABC 进行改进,使其能够快速搜索输出功率函数的所有极值。
3 改进人工蜂群算法
对于具有多个局部最优解或全局最优解的多峰函数,仅在解空间内搜索全局最优解已不能满足实际问题的要求,往往需要搜索多个全局最优解和有意义的局部最优解,从而为决策者提供多种选择或多方面的信息。标准ABC 只能收敛到一个全局最优解,因此本文从食物源初始化、食物源选择策略和小生境范围3 个方面对其进行改进。
3.1 正交生成法初始化食物源(策略1)
种群初始化是仿生优化算法中的重要步骤,直接影响解的质量和算法的收敛性。标准ABC 采用均匀随机数生成法初始化食物源。当食物源密度较小时,可能会因为食物源在不合理区域分布过于集中,造成初始种群质量差的问题。文献[21]采用一种新的交叉算子代替均匀随机数生成法初始化遗传算法的种群,称为具有分层结构的正交遗传算法。文献[22]提出了基于正交试验设计的进化算法初始种群生成法。正交生成法使得初始种群均匀地分布在解空间中,使算法具有更好的健壮性和稳定性。以MCR-WPT 系统输出控制问题的初始种群的生成为例介绍正交生成法具体步骤,初始种群正交生成法流程如图3 所示。

图3 初始种群正交生成法流程Fig.3 Flow chart of orthogonal generation method for initial population
首先根据种群个数将搜索空间的每个维度变量进行平均划分产生正交点。当搜索空间的维度大于1 时可能出现落在解空间外的正交点,因此需要依据式(7)计算各正交点的适应度剔除不在解空间中的正交点。输出控制问题是一维的,可省略此步骤。再在满足约束条件的正交点的领域范围内依据式(6)随机产生个体。然后依据式(7)计算各个体的适应度,按照标准ABC 的步骤3 选择适应度较优的个体组成初始种群。若个体数量小于要求的种群规模时,重新在领域中随机生成个体并判断适应度,直至满足要求。最后将生成的种群作为ABC 的初始种群,进入算法计算流程。采用正交生成法代替均匀随机数生成法初始化食物源,使得食物源合理地分布在解空间中,可提高每个峰被搜索到的概率和速度,进而提高算法的收敛性。
3.2 比较欧氏距离更新食物源(策略2)
标准ABC 的步骤2 和3 中,食物源集的更新都是由贪婪选择策略产生的,即是由父代和子代食物源直接对比适应度后得出的,这样有利于搜索结果向全局最优解靠近,但对于多峰函数这样可能会漏掉部分全局和局部最优解。图4 为食物源更新策略示意,它是一维多峰函数,x1~x7是父代,是对应的子代。若采用父代和子代直接对比适应度的贪婪选择策略,更新后的食物源集如图4(a)所示。可见:x1和x2都被去掉,它们的子代食物源向左侧峰靠近;虽然与x1、x2相比更靠近中间峰,但也会在直接比较后被去掉;原本在父代时有4 个食物源接近中间峰,在食物源更新后只有2 个且都在单侧的食物源接近中间峰,右侧峰也仅有2个在单侧的食物源,这可能导致漏峰。
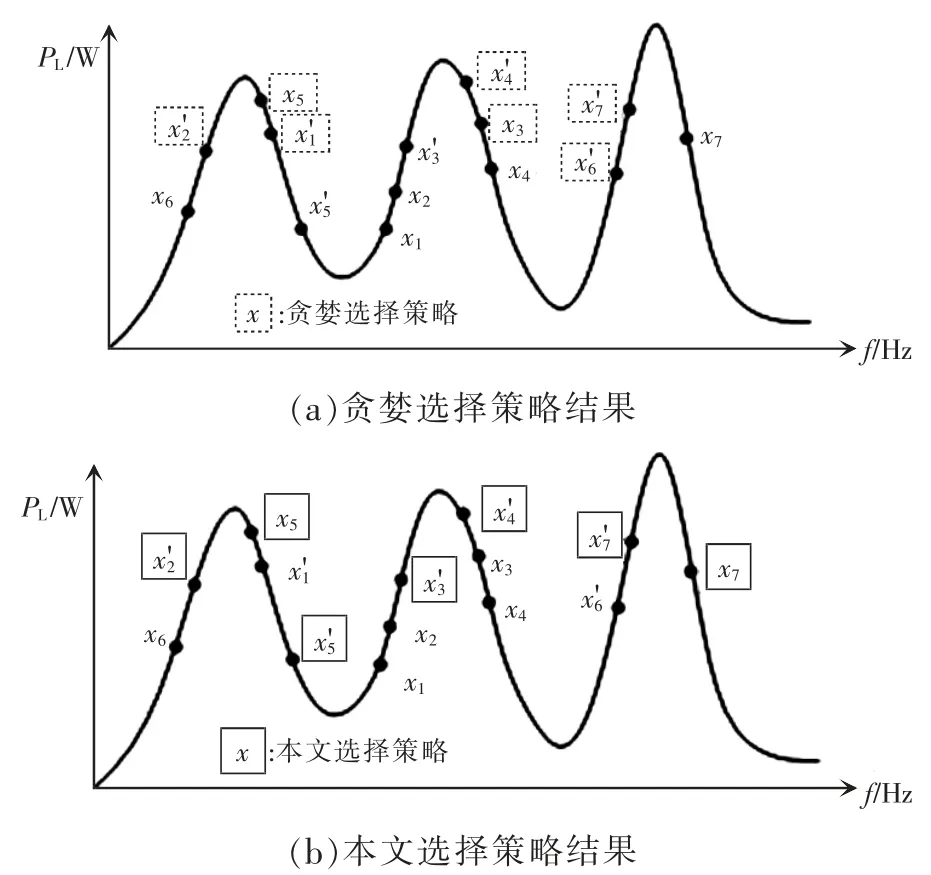
图4 食物源更新策略示意Fig.4 Schematic of food sources update strategy
本文将标准ABC 步骤2 和3 中食物源集的选择方式改进如下:首先将食物源按对应f 从小到大的顺序重新排序;再计算对应f 最小的第一个父代与所有子代的欧氏距离,选择与第一个父代欧氏距离最小的子代,对比其适应度的优劣,更新食物源集;然后计算第二个父代与余下子代的欧氏距离,用相同的方法更新食物源集;以此类推,直至比较完全部的父代和子代,结果如图4(b)所示。虽然没有优于其父代,但还是被保留了下来,避免了中间的漏峰;x7和都保留下来避免了右侧的漏峰。可见,采用比较欧氏距离的改进方法后,可以克服贪婪选择策略可能导致漏峰的缺点。
3.3 边界动态识别缩小范围(策略3)
在进化算法中,解空间越小越有利于算法的收敛。对于多峰函数,运用小生境技术优化进化算法时,通常认为一个峰所在的范围就是一个小生境最准确、最合适的范围,希望种群能在各个峰的周围相对集中。因此准确判断每个峰所在的小生境边界个体是提高算法速度和精度的关键。本文提出一种边界动态识别策略,用于判断每个峰所在的小生境范围,并尽可能缩小该范围。具体实现可分为如下两步骤。
步骤1判断峰的个数并初步确认边界个体。在初始化食物源和每次得到新的食物源后,都按照参数从小到大的顺序将食物源重新排序,得到新的食物源F'。然后计算F'中每个个体对应的适应度,并找到适应度最大的个体xind,分别在xind的左右两侧比较相邻个体的适应度。如在xind的一侧检测到后一个个体的适应度大于前一个个体的适应度,说明出现了波谷,这一侧至少存在1 个峰。以此类推,直至检测完所有个体的适应度。峰的个数和边界个体是存在2 个峰的一维函数,如图5 所示。排序后的食物源为x1~ x10,如图5(a)所示。x3对应的适应度最大,在x3的左侧适应度递减,在x3的右侧检测x6的适应度大于x5的适应度。因此可以确定x3的右侧有1 个峰。同时可以初步确定左侧峰的右边界个体是x5,为防止漏峰将右侧峰的左边界个体也确定为x5。若出现图5(b)的情况,在x3的右侧没有检测到波谷,则初步认为该函数只有1 个峰,需要在下一次更新食物源后再次判断适应度增量。
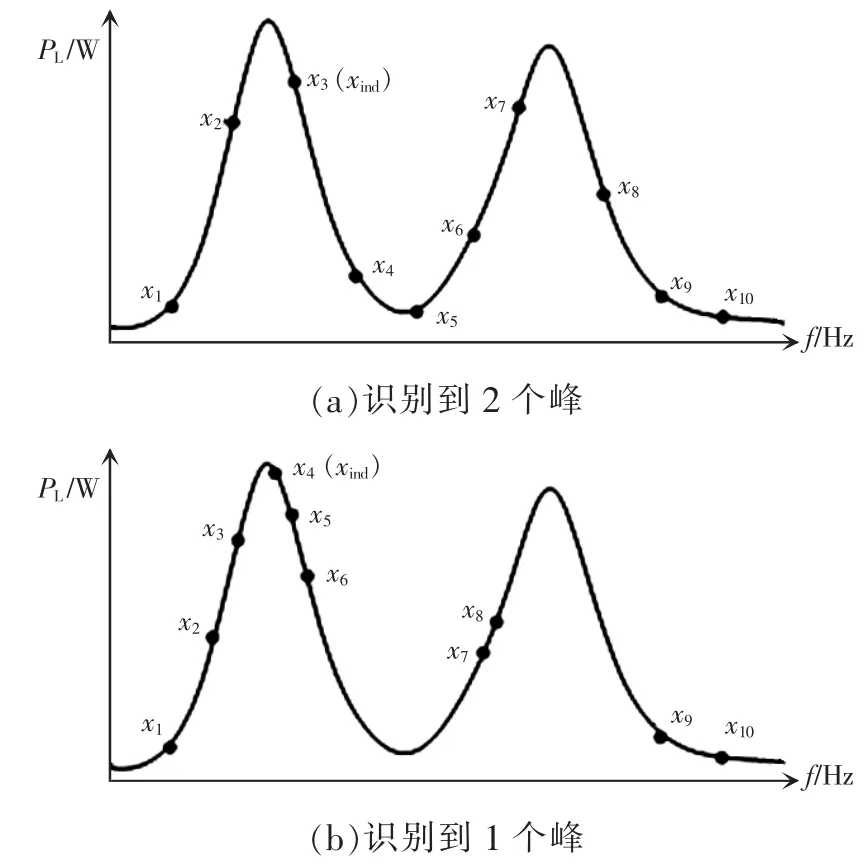
图5 峰的个数和边界个体Fig.5 Number of peaks and boundary individuals
步骤2判断边界个体的增量,通过移动边界个体得到更准确的小生境范围。以2 个峰的多峰函数为例,每次更新食物源后存在适应度最大值在左侧和右侧两种情况。移动边界个体示意如图6 所示,以图6(a)最大值在左侧情况为例,按照重新排序后的适应度初步判定x5为左峰的右边界个体和右峰的左边界个体。再根据x5和与之相邻的x6的增量情况将边界个体进行适当的移动。边界个体的增量可分为4 种情况:情况1,x5的增量为负可作为左峰的右边界个体,x6的增量为正可作为小生境的边界个体;情况2,x5可作为左峰的右边界个体,若将x6为右峰的左边界个体会丢失右峰,因此需将x6向左移直至x6的增量为正,并确定为右峰的左边界个体;情况3,x7可作为右峰的左边界个体,若将x6为左峰的右边界个体,虽然不会丢失左峰但会使左峰的小生境范围过大,不利于收敛到局部最优值,因此需将x6向左移直至x6的增量为负,并确定为左峰的右边界个体;情况4,可将x6改为右峰的左边界个体,同时再将x6向左移直至x6的增量为负并确定为左峰的右边界个体。以此类推,可以处理如6(a)所示最大值在右侧的4 种情况。
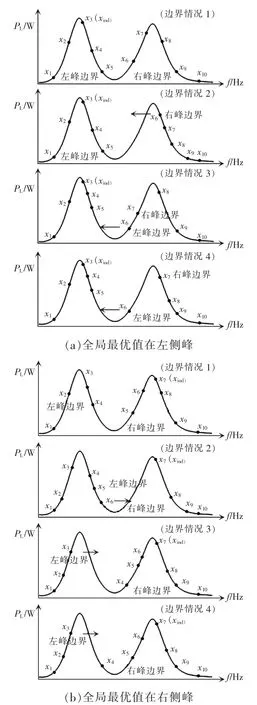
图6 移动边界个体示意Fig.6 Schematic diagram of moving boundary individuals
4 仿真分析与实验验证
4.1 仿真分析
本文提出3 种改进策略:策略1,采用正交生成法初始化食物源;策略2,通过比较父代与子代之间的欧式距离选择食物;策略3,动态更新小生境边界。以两线圈MCR-WPT 系统的输出功率为测试函数比较3 种改进策略对算法性能的影响。仿真时测试函数独立运行100 次,取性能参数的平均值。停止条件设置为:当全局最优值或局部极值对应的频率连续30 次变化不超过0.1 Hz,或者迭代次数达到100 次,或者目标函数评估次数达到4 000 次。改进策略对算法性能的影响见表1。

表1 改进策略对算法性能的影响Tab.1 Influences of improved strategies on the performance of algorithm
由表1 可知,对标准ABC 采用策略3 进行改进后,可以搜索到全部的峰。在采用策略3 的基础上分别加入策略1 和策略2,都可以减小运行时间和评估次数。当3 种策略同时采用时,算法性能最优。表1 也能反映重要参数对算法性能的影响。当雇佣蜂数目较少时,无法每次都能搜索到全部的峰值点;随着雇佣蜂数目的增多,算法的搜索精度提高,但运行时间和目标函数评估次数都增多。针对本文的测试函数,当选择雇佣蜂数目为30 时,可以平衡解的精度和算法的效率。可见,在应用改进ABC 时,需根据具体函数选择合适的雇佣蜂数目。
将本文的改进ABC(IABC)与标准顺序生境遗传算法(SRGA)做对比,结果见表2。标准顺序生境遗传算法在种群数目较少的情况下,无法每次都搜索到目标函数的全部峰值点。当种群数目一致时,本文算法在运行时间和目标函数评估次数上都优于标准顺序生境遗传算法。这是由于本文算法在初始化种群、小生境范围判断、食物源的改进策略等方面进行了优化,使得算法不易跌入局部最优,提高了算法的搜索能力。

表2 算法对比结果Tab.2 Comparison result between algorithms
4.2 实验验证
为了验证本文所提出的改进ABC 的性能,搭建了一个两线圈MCR-WPT 系统,采用AR 高频功率放大器(10~100 MHz)作为电源,采用精密阻抗分析仪6500B 测量线圈、电容和耦合系数,采用Agilent 示波器DSO-X 3024A 测量电压和电流。系统实验参数见表3。

表3 MCR-WPT 系统实验参数Tab.3 Experimental parameters of MCR-WPT system
分别测量无输出控制NOC(non-output control)和采用输出控制OC(output control)后时系统参数。NOC 时系统工作频率保持1 MHz 不变,OC 时采用本文算法计算最优频率并手动调频,当线圈间距离为7.8 cm 时负载电压UL和电流IL波形如图7 所示。可见,NOC 时系统输出功率为0.39 W;引入调频控制后工作频率为939 kHz,输出功率提高为1.12 W。

图7 线圈间距离7.8 cm 时负载电压和电流波形Fig.7 Waveforms of load’s voltage and current when the distance between coils is 7.8 cm
不同距离时计算和实验结果对比如图8 所示。可见,采用本文算法对MCR-WPT 系统进行输出控制后,可以显著提高系统在过耦合状态时的输出功率;虽然传输效率有所下降,但仍保持大于85%且较稳定。

图8 计算和实验结果比较Fig.8 Comparison between calculation and experimental results
5 结语
当线圈间距离小时,MCR-WPT 系统处在过耦合状态发生频率分裂,系统的输出功率在多个频率上有多个局部极值。因此输出功率是一个极值个数和半径均可变的多峰函数。MCR-WPT 系统的输出控制问题转变为通过优化算法搜索输出功率函数的所有极值。本文对标准人工蜂群算法进行改进,采用正交生成法均匀分布食物源,采用欧氏距离比较法克服漏峰,采用动态边界缩小小生境范围,通过仿真证明改进策略的有效性和先进性。同时以两线圈MCR-WPT 系统为例,仿真和实验结果表明,本文算法受群体规模的影响较小,收敛速度快,优化精度高,且该算法不需要设置任何特定的参数,易于实现,可用于MCR-WPT 系统的输出控制。
