三相LCL 并网逆变器自带低通滤波功能的复合控制方法
2022-04-19张新燕岳家辉徐其丹
周 鹏,张新燕,岳家辉,王 录,高 亮,徐其丹
(1.新疆大学电气工程学院,乌鲁木齐 830047;2.国网新疆电力有限公司经济技术研究院,乌鲁木齐 830000)
随着电力电子技术和新能源产业的高速发展,并网逆变器作为分布式能源发电并网连接的关键装置,在电力传输领域已有广泛应用[1-2]。相比于L型滤波器,LCL 型滤波器在使用较少的电感材料条件下具有更好的滤波效果,不仅提高了并网电能质量,同时降低了成本,在并网逆变器中广泛应用[3-5]。
三相LCL 型并网逆变电流控制器用于提高电网的稳定性和动态补偿特性,对入网电流的谐波问题有很大的改善作用。PI 控制器在抑制谐波的过程中存在静差,交流信号下谐波电流无法被完全跟踪[6]。比例谐振控制器对谐振频率处的特定次谐波进行重点补偿[7-8],但是使用多个控制器并联模式的控制结构复杂,降低了控制精度和相位裕度。重复控制在基波的所有倍频谐波处都有较高的增益,在各次谐波频率处都具有相同的增益,具有设计简单和稳态精度高的优势,在逆变器电流控制器中应用最多[9-10]。
重复控制器有良好的稳态特性,但是在负载突变的情况下,补偿电流动态响应较慢。PI 控制器动态响应快,能同时保证电流控制器的稳态和动态性能[11-13]。重复控制器的另一个缺陷是其在所有基波倍频处的增益都是一样的,而在实际的逆变电路中,谐波主要分布在低频处,高频处的谐波含量远低于低频处,这对于重复控制器并不是优势,高频处相同的增益会影响控制系统的稳态性能。传统重复控制在内模中或在补偿装置内串联低通滤波器[14-15],两种方案使重复控制器在高频处的增益都有明显下降,并且抑制了谐振尖峰,但是完全舍弃了重复控制器对高次谐波的抑制,不仅浪费了控制资源,并且影响了并网电流的电能质量。
本文针对同时保证控制系统稳态性能和重复控制在高倍频处增益不能协调控制的矛盾,提出了自带低通滤波功能的复合控制方案,即在不改变重复控制器内模结构的基础上,建立单调递减的谐振衰减控制器,由低次倍频至高次倍频处增益依次衰减,将比例控制与带有谐振衰减控制器的重复控制并联组成自带低通滤波功能的复合控制,以保证系统高频次谐波衰减增益,提高系统的整体稳态性能,同时提高系统负载突变时的动态补偿能力。将该控制策略应用于三相LCL 并网逆变器中,通过理论分析和仿真试验验证该控制方案的有效性。
1 三相LCL 逆变器模型
在αβ 静止坐标系控制下,三相LCL 型并网逆变器的拓扑及其控制结构如图1 所示。并网逆变器的三相均为全桥结构,Edc为直流侧输入电压,交流侧通过LCL 滤波器并网,L1、L2、C 分别为逆变器侧电感、网侧电感和滤波电容,ua、ub、uc分别为三相逆变器输出电压,iga、igb、igc分别为三相并网电流,uga、ugb、ugc分别为三相电网电压,ica、icb、icc分别为三相滤波电容电流,G(s)为电流控制器,H(c)为电容电流的采样系数。并网电流ig到逆变器输出电压u 的传递函数为
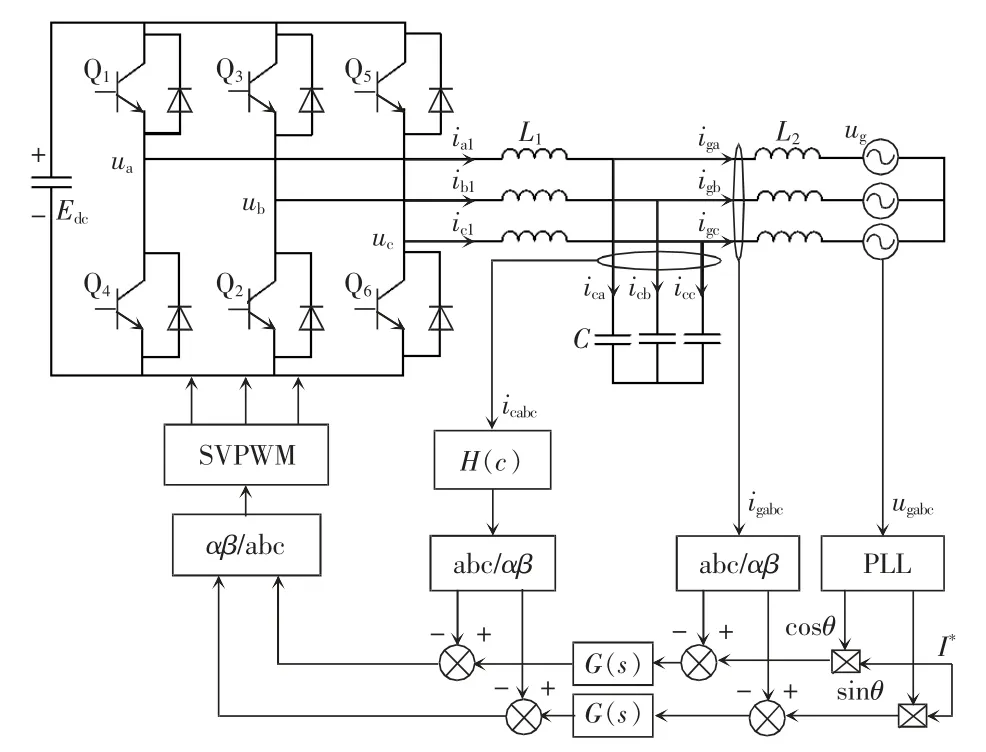
图1 三相LCL 型逆变器拓扑及其控制结构Fig.1 Three-phase LCL inverter topology and its control structure

由于LCL 型逆变器有谐振尖峰,会导致并网控制系统不稳定的问题无源阻尼或有源阻尼是有效的解决方案,且有源阻尼方案具有保证滤波器的谐振增益和低损耗的优势。本文采用电容电流反馈的有源阻尼方案,在该控制方式下的LCL 滤波器传递函数为

式中,Hc为电容电流反馈系数。电流控制器输出的电流与电容电流采样信号ic的差值作为调制信号,SVPWM 控制三相逆变桥的开关管Q1~Q6的通断,以此抑制LCL 滤波器的尖峰。
2 重复控制与比例控制的复合控制策略
2.1 复合控制器的内模
重复控制器内模包含基频的全部倍频信号模型,相当于多个比例谐振控制器的并联结构。在电网电压周期T0下,基波频率为

根据图2 所示连续域中重复控制器的内模结构,通过输出y(s)和输入r(s)的关系,得到重复控制器在连续域的展开传递函数GRC,并根据指数函数的性质展开[13]为

图2 连续域中重复控制器的内模结构Fig.2 Internal model structure under repetitive controller in continuous domain
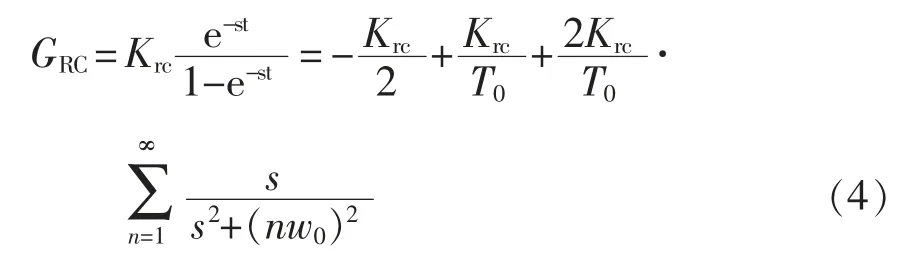
式中:Krc为重复控制器的增益系数;n 为周期采样次数。
由式(4)可知,重复控制是由一个负比例环节、一个积分环节和多个谐振控制器环节组成。负比例环节影响电控制器的静态运行时间和动态响应速度,并且重复控制器自身存在一个基波周期的延时环节。针对此问题,将一正比例环节与重复控制器并联组成复合控制器,对负比例系数进行修正,提高逆变器并网稳定性。图3 为复合控制器在离散域下的结构框图。
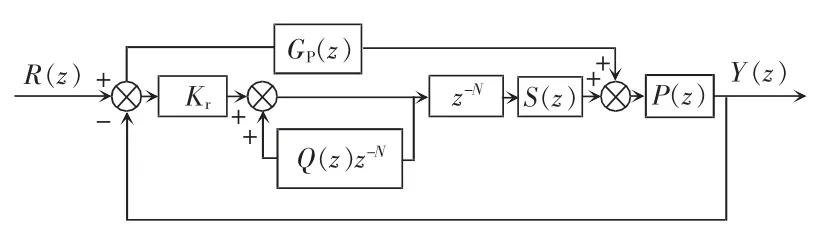
图3 复合控制器的结构框图Fig.3 Block diagram of the structure of composite controller
图3 中,Q(z)为重复控制的内模补偿器;S(z)为重复控制补偿环节;P(z)为受控对象。当滤波系数Q 为1 时,重复控制器在各次谐振频率处的增益都是无穷大的,对高频段处稳定性能产生不利影响,一般滤波系数Q 选取略小于1 或低通滤波器以提高控制系统的稳定性。当Q 选取低通滤波器时,控制器会失去在高频段谐波的抑制作用;当Q 选取略小于1 的数值时,控制器在各次谐振频率处都为有限值增益,对谐波的抑制效果有一定程度的影响,选取合适的增益系数Krc可以弥补这方面的损失,在不改变内模结构的条件下减小稳态误差。重复控制的传递函数为
式中,kP为比例系数。
2.2 重复控制器的设计
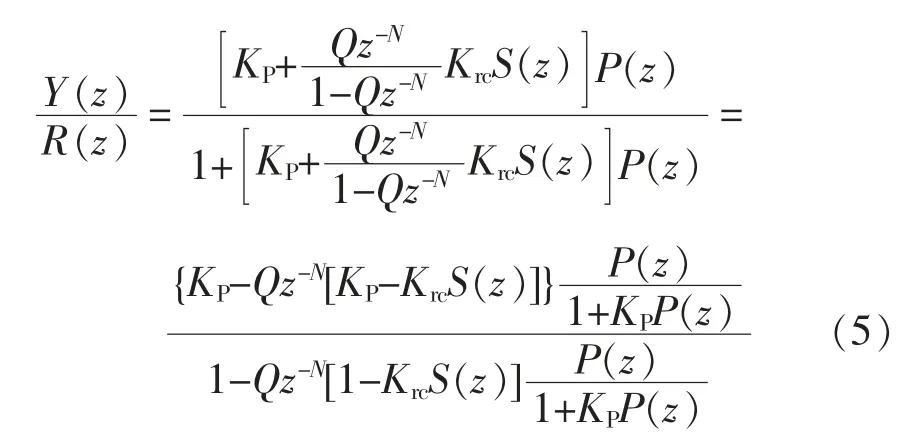
当滤波系数Q 取值小于1 时,增益系数Krc和比例系数Kp的选取都会影响控制系统的稳定性。令

根据式(5),系统在同时满足以下两个条件时可保持稳定:①1+KpP(z)=0 的根在单位圆范围内;②|G(z)|=|Q[1-KrcS(z)H(z)]|<1。
当受控对象确定后,仅有Kp决定条件①是否成立,同时条件①决定闭环系统H(z)的稳定性。受控对象P(z)的参数确定后,通过H(z)的根轨迹图可判定Kp的取值范围。比例系数确定后,增益系数Krc的选取决定条件②是否满足。增益系数Krc对重复控制增益影响的伯德图如图4 所示,Krc越大,各频率处增益和谐振带宽越高,但是过高的带宽会增大补偿误差。选取合适的Krc对谐波抑制能力和系统动态稳定都有积极的影响。

图4 增益系数Krc 对重复控制增益影响的伯德图Fig.4 Bode diagram of the effect of gain coefficient Krc on repetitive control gain
当Q<1 时,条件②可变形为

由式(7)可知,补偿环节S(z)的选取也影响增益系数Krc的取值,通常补偿环节S(z)由低通滤波器和相位补偿zm组成,用于增强系统的稳定性能。低通滤波器起到高频增益衰减作用,相位补偿zm用于补偿受控对象的相位滞后。通过合理选取Kp和zm可以改变条件②中G(z)的幅频特性和相频特性。图5 为Krc=1、Kp在选取不同值时G(z)的奈奎斯特曲线。当G(z)的奈奎斯特曲线分布在单位圆内时,条件②成立。从分布规律可以看出,Kp越大,G(z)的分布范围越小,但是当Kp继续增大,其分布范围会继续扩大,当范围超过单位圆时,条件②不成立,系统不稳定。

图5 Krc=1 时G(z)随Kp 变化的奈奎斯特曲线Fig.5 Nyquist curve of G(z)as a function of Kp at Krc=1
综上所述,当Q<1 时,复合控制器参数的选取规则为:①根据滤波截止频率选取低通滤波器,以增强控制系统的稳定性;②根据系统的增益要求和控制带宽,选取合适的Krc;③Krc确定后,画出H(z)随Kp变化的奈奎斯特曲线,选择分布范围最小的Kp;④对相位补偿zm进行设计。
3 自带低通滤波功能的复合控制器
由图4 重复控制器的伯德图可知,控制器在每一个谐振频率处增益都是相同的,会对控制系统的稳定产生不利影响。传统重复控制是在内模中串联低通滤波器,使高频处的增益达到稳定的范围,但是低通滤波器会改变内模的精准性,使重复控制器极大削弱甚至失去对对高频处的作用,浪费了控制资源。针对以上矛盾,按照系统谐波由低到高依次减弱的分布规律,提出在重复控制内模建立谐振衰减控制器,在省去低通滤波器环节设计的条件下,并联比例控制组成复合控制器。复合控制在低频和高频谐波处的都有单调递减的增益,同时保证了控制系统在负载突变情况下的动态补偿能力。根据式(4)重复控制的展开函数,建立自带低通滤波功能的重复控制函数

式中,F(n)为谐振衰减器,其选取不唯一,有随n 增大而减小的特点,并且能与控制器合并为统一形式(即控制函数可实现)。由泰勒级数性质


根据式(4)和式(9)的展开形式,对式(10)整合得

自带低通滤波功能的复合控制器表达式为

式(12)为复合控制器的统一形式。图6 为Kp=1、Krc=1 时自带低通滤波功能复合控制器的伯德图,复合控制在各次谐振增益呈逐渐下降趋势,证明此类控制器设计方式的有效性。
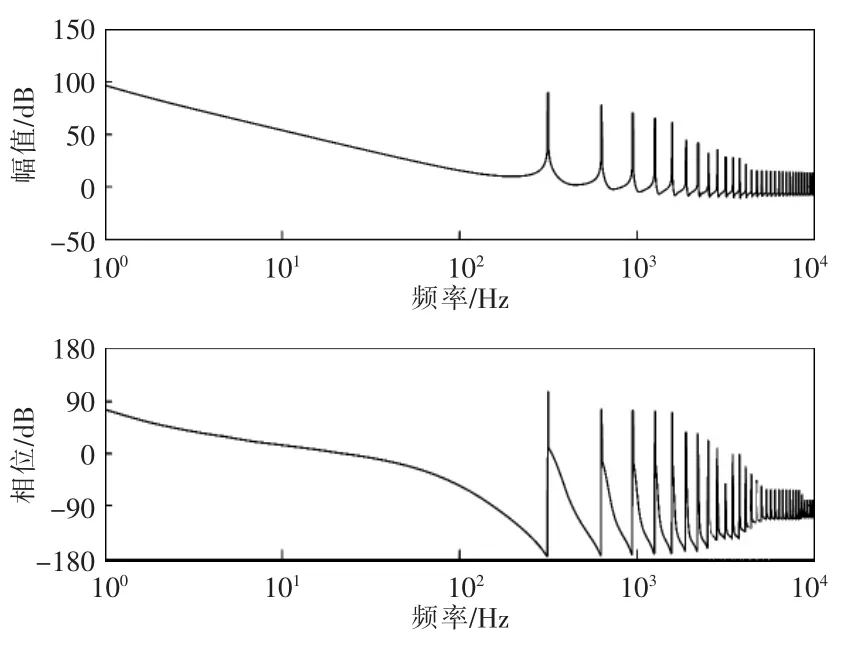
图6 自带低通滤波功能的复合控制伯德图Fig.6 Bode diagram ofcomposite control with low-pass filtering function
实际系统在离散域下建立的重复控制相比连续域下的更方便。考虑加入Q<1 的情况下,设,重复控制函数为

离散域下重复控制在基波周期T0=0.02 s,采样周期Ts=1×10-4s 时,周期采样次数n=200,其分解公式为

结合式(13)与式(14)可得

则离散域下自带低通滤波功能重复控制的表达式为
由于采样次数n 都在余弦函数内部,利用恒等公式有
式(17)的功能是将相乘的两项转化为相加项。结合恒等公式,令,选取谐振衰减器的表达式为

将式(18)代入式(16)得

结合式(15),可得离散域下自带低通滤波功能的复合控制表达式为
进一步化简为

由式(20)可知,离散域下复合控制器的参数除了与Kp(z)和Kr(z)有关,还与a 有关。当Q=0.95、a为略大于1 时,其复合控制的伯德图如图7 所示。

图7 离散域下自带低通滤波功能复合控制伯德图Fig.7 Bode diagram of composite control with lowpass filtering function in discrete domain
从图7 可看出,q 的取值决定高频带处的稳定性和衰减速率。q 越接近1,高频带处谐振越稳定,且衰减速率越快。与使用截止频率为1 kHz 低通滤波器的传统重复控制相比,高频谐振增益对比如图8所示,传统重复控制在高频处谐振增益约为3 dB,基本失去了控制器在高频处的作用。而自带低通滤波功能的复合控制增益约为15 dB,证明改进后的复合控制在谐振频率处的谐波抑制能力要优于传统重复控制。

图8 传统重复控制与改进复合控制在高频谐振处的增益对比Fig.8 Comparison of gain between traditional repetitive control and improved composite control at high-frequency resonance
由图7 离散域下自带低通滤波功能复合控制的伯德图可以看出,重复控制的低频特性受到改变,部分频段体现出负阻尼特性。基于LCL 滤波的并网逆变器中,如果并网有无功补偿装置的情况下,会引发低频振荡,导致系统不稳定。针对此问题,为了消除负阻尼影响,抑制低频谐振,采用文献[16]方法,在电流指令中引入电网电压前馈。采用负阻尼补偿的输出电流控制框图如图9 所示。

图9 采用负阻尼补偿的输出电流控制框图Fig.9 Block diagram of output current control with negative damping compensation
图9 中,R 为电容电流反馈有源阻尼系数,GRC(s)为重复控制器,Fm(s)为基于数字控制的脉宽调制PWM(pulse width modulation)变换器的特征频率,KPWM为PWM 变换器的调制增益,采用空间矢量脉宽调制SVPWM(space vector pulse width modulation)时,KPWM=1。
其控制原理描述为

式中:Gi(s)为电流闭环增益;Y0(s)为闭环输出导纳。
由式(24)可知,并网控制系统可采用诺顿定理进行等效。当控制系统输出导纳存在负阻尼时,此时系统容易发生低频谐振。本次控制方式加入由补偿的虚拟阻性导纳系数和基波陷波器构成的负阻尼补偿环节Gc(s),其数学模型为

式中:YR为虚拟导纳系数;GNF(s)为基波陷波器的传递函数。推导可得所需补偿的虚拟导纳系数YR为

式中,Id为输出电流的d 轴分量。适当调制虚拟导纳系数YR即可补偿负阻尼,也可以最大限度地降低其对输出电流的影响。
4 仿真分析
为了验证自带低通滤波功能复合控制器的正确性和有效性,在Matlab/Simulink 软件仿真平台下搭建三相LCL 并网逆变器,分别对其静态性能和动态性能进行分析。仿真参数如表1 所示。

表1 逆变器仿真参数Tab.1 Simulation parameters ofinverter
选取内模滤波系数Q=0.98,为了满足重复控制系统的稳定,需选取合适的比例控制系数Kp。H(z)随Kp变化的根轨迹曲线如图10 所示。Kp的取值范围为0~23.6,取Kp=21,再根据谐振增益和带宽选择的要求,增益系数Krc=20 即满足复合控制器稳定条件,最后选择补偿环节z3补偿3 个系统相位延迟。
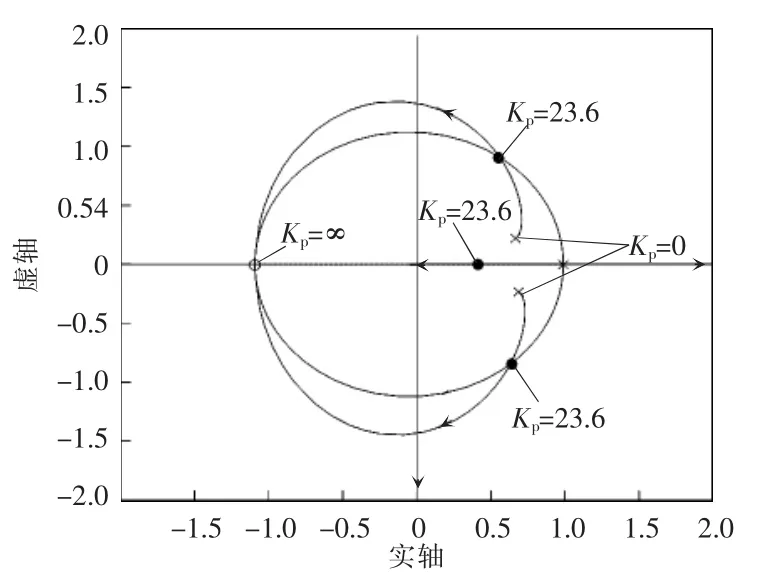
图10 H(z)随Kp 变化的根轨迹Fig.10 Root locus map of H(z)with Kp
以A 相并网电流分析为例。图11 为普通PI 控制下的并网电流,可见电流畸变比较严重,傅里叶分析后谐波畸变率THD 高达17.12%。图12 为投入传统重复控制后的并网电流,可见,并网电流有很大的改善。

图11 普通PI 控制下的并网电流Fig.11 Grid-connected currentunder ordinary PI control
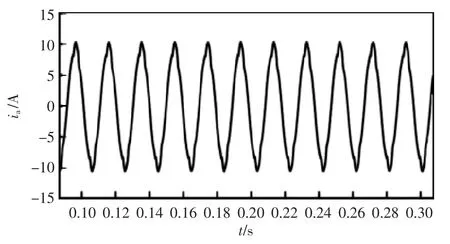
图12 传统重复控制并网电流Fig.12 Grid-connected current undertraditional repetitivecontrol
图13 为传统重复控制下并网电流的傅里叶分析结果,谐波畸变率THD 为4.05%,从谐波分布看仍存在大量的高次谐波,对系统的稳定性能产生不利的影响。投入自带低通滤波功能复合控制后并网电流如图14 所示,其傅里叶分析结果如图15 所示,谐波畸变率THD 为2.36%。仿真结果表明,改进后的复合控制能改善并网电流整体质量,同时高次谐波含量明显的降低,证明自带低通滤波功能复合控制对高频处谐波抑制的有效性,并且提高了系统的整体稳态性能。

图13 传统重复控制下并网电流的傅里叶分析Fig.13 Fourier analysis of grid-connected cur rent under traditional repetitive control

图14 自带低通滤波功能复合控制并网电流Fig.14 Grid-connected currentunder composite control with low-pass filtering function

图15 自带低通滤波功能复合控制下并网电流的傅里叶分析Fig.15 Fourier analysis of grid-connected current under composite controlwith low-pass filtering function
为了在比较动态响应之前减小静态误差,在静态仿真0.35 s 时突增40%的负载,对负载突变后三相并网逆变器的动态性能进行分析。图16 为传统重复控制方式下的跟踪电流和指令电流的变化情况,可见稳态时跟踪电流出现超调,0.35 s 负载突变后两个半基波周期跟踪电流才趋于稳定。图17为自带低通滤波功能复合控制下跟踪电流和指令电流变化情况,可见稳态时电流补偿精度高,0.35 s后约一个半基波周期跟踪电流即可恢复稳定。以上分析结果验证了自带低通滤波功能复合控制稳态时改善系统稳态时的电能质量,对于负载波动具有较强的适应性和动态响应能力。

图16 传统重复控制下的电流跟踪情况Fig.16 Current tracking under traditional repetitive control
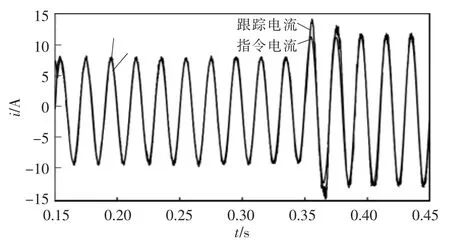
图17 自带低通滤波功能复合控制下的电流跟踪情况Fig.17 Current tracking under composite control with low-pass filtering function
5 结论
(1)在重复控制的内模中建立谐振衰减控制器,简化了重复控制器的设计结构,保存了控制器对并网电流高频次谐波的抑制能力,并且提升了并网电流的整体电能质量。
(2)与比例控制并联用以消去负比例环节,提升了系统的动态补偿能力。
(3)提出对自带低通滤波功能复合控制的设计方案,保证了控制系统的稳定性。
理论分析和仿真结果表明,与传统重复控制相比,本文提出的自带低通滤波功能复合控制应用于三相并网逆变器中,对系统的稳态性能和动态性能都有所提升。
