维修机位动态精准调度和飞机安全移动路径规划系统开发和应用
2022-04-15彭远郭润夏申策
彭远 郭润夏 申策
摘要:为有效提高维修机位的利用率,减少飞机拖动次数并降低飞机在拖动过程中的剐蹭风险,解决复杂维修场景下维修需求与机位的非线性动态优化匹配问题和移动路径计算的实时性问题,以广州飞机维修工程有限公司日常维修作业为应用场景,建设维修机位动态精准调度和飞机安全移动路径规划系统,实现维修机位自动化调度,使其能够在现有硬件条件下增加约10%的产能,同时自动检测飞机碰撞风险源,降低90%碰撞风险。
关键词:维修机位调度;路径规划;安全
Keywords:maintenance stands scheduling; route planning;safety
0引言
2017年,中国民航首次提出了“智慧民航建设”的概念,中国民用航空局在2021年12月发布的“智慧民航建设路线图(征求意见稿)”中明确指出需要“提高地面保障智能部署与精准掌控水平”,并在2025年“升级和实现飞机调度、机场资源使用、机组人员配置、维修资源部署和场面运行保障质量评估等功能,为航空公司地面运行保障和管理提供数据决策支持”[1]。
维修机位是宝贵的生产要素,航空公司和大型维修企业对提高维修机位利用率有着迫切需求。当前,蓬勃发展的维修需求使航空维修企业的维修机位资源日益紧缺,维修任务的多样性、维修环境的复杂性、维修工作的高负荷和高风险,都对维修机位资源配置和优化提出了更高的要求[2-4]。目前,维修机位资源大多通过人工配置,由工作人员根据当天的飞机停场情况、当天航班情况、进场航班情况等动态信息对维修机位进行调度分配,在保证安全的前提下规划飞机的拖动路径和具体实施情况,由于维修工作现场环境复杂,维修机位分布的多样且复杂,维修机位调度工作量大、复杂程度高,传统的机位调度方式分配效率低,核心指标优化难度大,制约全局机位利用效率的提升,无法发挥最大产能。
因此有必要对维修机位动态精准调度和飞机安全移动路径规划开展研究,实现对维修机位的优化调度及维修过程中飞机拖动路径的自动规划,最大化机位资源的使用效能,提高产能,有力支撑“智慧民航”建设。
1 国内外现状
国内目前针对维修资源调度普遍采用人工方式,随着维修飞机及维修任务增多,其工作量呈指数形式增加,资源调度效果差,严重制约着维修产能的充分发挥。针对维修资源调度和飞机维修路径规划问题,民用航空器制造商和大型航空公司也紛纷开展研究工作,维修过程开始向数字化、平台化转变。
空客与大数据公司Palantir Technologies在2017年联合推出Skywise(智慧天空)计划,Skywise集成零部件更换、飞行计划与延误、维护历史等相关数据,以使航空公司重新分配各种资源;汉莎技术公司在同年展示了综合数字化维修平台AVIATAR,可以将数据用于预测维护方案,状态监测和故障分析,可实现200架飞机规模的同时在线调度;维修业应用比较广泛的系统还有波音的AnalytX、法荷航维修工程公司的Prognos以及霍尼韦尔公司的Connected Aircraft。
高级地面活动引导与控制系统(Advanced Surface Movement Guidance and Control Systems,A-SMGCS)是一种集监视、路由、控制和引导功能于一体的技术,可以为机场区域内的所有飞机、车辆提供精确的引导和控制,以确保机场场面的安全[5]。国际民航组织在2004年发布的高级场面活动引导与控制系统手册中提出了A-SMGCS的概念。欧美顶尖的实验室和研究机构,如德国DLR的飞行导航研究所以及美国NASA-Ames实验室都对A-SMGCS相关技术进行了大量基础性研究工作。法国的Thales、意大利的Selex以及荷兰的HITT等公司已经推出了各自的A-SMGCS方案,并且在法国戴高乐机场、德国法兰克福机场、意大利米兰马尔彭萨机场、瑞典斯德哥尔摩机场等大型国际机场得到了初步应用。2008年,首都国际机场安装了国内第一套A-SMGCS系统,此后上海、广州、成都等相继引进了国外场面监视雷达设备以实现对场面活动目标的监视。
遗憾的是,上述方案主要应用于飞机维修计划安排或机场场面控制,对复杂背景下的维修机位调度和飞机安全移动路径规划尚无成熟的技术方案。
2系统方案
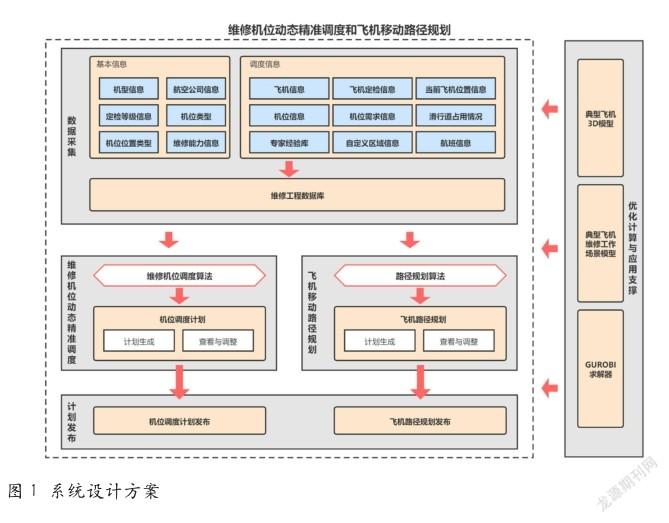
以广州飞机维修工程有限公司日常维修生产作业为应用场景,以维修机位优化调度和飞机安全移动路径规划为业务需求,构建由数据采集、优化计算与应用支撑、维修机位动态精准调度和飞机安全移动路径规划等模块构成的自动化系统,其设计方案如图1所示。
2.1 数据采集
数据采集模块对公司现有业务数据库进行数据处理,形成维修工程数据库,主要内容如下:
1)数据处理
支持与公司现有业务数据进行数据迁移和数据联合,完成维修工程数据的自动抽取、数据预处理和数据转换等功能,并提供基于用户、角色和数据源的用户访问控制及监控。
①数据抽取功能:研究公司现有业务数据库的对接规则,通过直接访问或数据抓取的形式抽取公司相关业务系统的结构化数据;
②数据预处理功能:研究公司相关业务数据库的数据表达形式,对自动抽取的数据进行数据类别及内容分析检测;
③数据转换功能:设计维修工程数据库的数据表和数据视图,将预处理后的数据内容填充到维修工程数据库;
④数据访问控制功能:设计基于用户、角色和数据源的用户访问控制,监控数据对象的用户使用情况。
2)维修工程数据库:用于存放经过数据处理后的结构化维修工程数据,如维修任务数据、滑行道数据、维修机位数据等,并提供接口进行数据的导入和数据库抽取。
2.2 优化计算与应用支撑
优化计算与应用支撑模块为维修机位动态精准调度模块和飞机安全移动路径规划模块提供计算能力和显示资源,主要内容如下:
1)求解器:为维修机位动态精准调度与飞机移动路径的计算等业务模型提供模型求解和计算能力, 通过Gurobi求解器解决线性规划 (Linear Programming)、二次方程规划 (Quadratic Programming)、二次方程約束规划(Quadratically Constrained Programming)和混合整型规划 (Mixed Integer Programming) 等问题的有效优化模型和快速求解方法[6]。
2)典型飞机维修工作场景模型:开发典型飞机维修工作场景3D模型,包括但不限于机库、滑行道、试车位、附属停机坪等。
3)典型飞机3D模型:开发典型飞机的3D模型,包括但不限于波音737-300、737-700、737-800、737MAX、747-400、777-200、777-300、787-800、787-900、空客A319、A320、A321、A320neo、A330-200、A330-300、A350-900、A380-800、中国商飞ARJ21等。
2.3 维修机位动态精准调度
维修机位动态精准调度模块完成维修机位动态精准调度功能,依据飞机维修任务自动匹配维修机位,给出维修机位调度计划图,根据调度时间跨度分为长期计划和短期计划。
1)维修机位调度长期计划:针对当前已经在场开始维修工作的飞机和待入场的飞机进行机位调度,从全局角度出发,制定未来15天以上的机位调度计划。
2)维修机位调度短期计划:针对长期计划发布后,新的机位需求要求将飞机从目前机位移动到满足功能要求的目标机位,在此移动路径上存在需要配合让位的飞机,为配合让位飞机自动分配机位并给出其配合让位时间,并在移动过程中满足就近移动且时空上不碰撞的安全要求,制定24小时内的飞机移动和配合让位调度方案。
2.4 飞机安全移动路径规划
在维修机位动态精准调度模块给出飞机的某项维修任务所在的目标机位后,即启动飞机移动路径规划,根据现场飞机停放状态给出最优移动路径[7-8],并通过可视化3D动画显示飞机拖行路线。
3系统设计
维修机位动态精准调度和飞机安全移动路径规划系统总体业务处理流程如图2所示。
3.1 机位调度过程设计
1)长期计划
调度目标:在满足飞机对维修机位需求的前提下,使飞机的总拖动次数最少。
输入信息:在场维修飞机的基本信息(如飞机所在机位、飞机机型、飞机维修任务),以及待入场飞机的基本信息(如飞机机型、飞机维修任务)、机位的基本信息(如机位坐标、机位维修能力、接入点坐标等)。
约束条件:一架飞机的每个维修需求只能由一个维修机位完成一次;一个维修机位同时只能处理一个维修需求;只有维修机位具备相应维修能力才能承担这项维修需求;每个维修需求持续时间大于零;一个维修需求开始处理后不能中断;只有在前一个需求完成后才能处理下一个维修需求。
输出信息:每架飞机每个维修需求的机位安排。通过可视化3D界面显示维修机位安排计划,给出维修机位调度计划图;提供维修机位人工操控界面,方便计划员制定、修改和发布飞机拖行和停放的位置和时间;提供信息自动提示功能,当鼠标指向任何一架飞机,显示该飞机后续安排航班信息、当前工作内容及后续的机位安排计划等信息。
长期计划操作页面如图3所示。
2)短期计划

调度目标:飞机移动过程不发生剐蹭的同时尽可能多地占用滑行道进行飞机移动,使飞机移动路径最短且所有让位飞机移动距离之和最小。
输入信息:飞机的当前机位与目标机位(来自长期计划)、当前机位状态。
约束条件:让位飞机目标机位应该满足让位飞机当前维修需求;一架让位飞机只能选择一个目标机位;多架让位飞机让位后不发生碰撞;让位飞机让位过程中无其他飞机阻挡;每架让位飞机让位持续时间30分钟;所有让位飞机需要在指定时刻前完成让位;出库过程中靠近滑行道的飞机先让位;入库过程中远离滑行道的飞机先让位。
输出信息:配合让位飞机目标机位及让位时刻。提供短期计划人工操控界面,方便计划员制定、修改和发布飞机拖行和停放的位置和时间;可以突出显示单机机位变化路线,并提供拖飞机目的和飞机进场工作等信息;机位计划图有时间轴,拖动时间轴滑块,可以3D动画形式直观地模拟显示任意时间点的飞机摆放及拖动状况。
短期计划操作页面如图4所示。
3.2 飞机移动路径规划过程设计
规划目标:飞机由起始机位至滑行道的距离与滑行道至目标机位的距离之和最短。
约束条件:机库内的飞机移动至机库外时,必须经过机库出口;飞机移出起始机位时,必须沿最短路径到达滑行道;飞机移入目标机位时,必须沿最短路径从滑行道驶出;飞机移动过程中,不能与场面上现有飞机产生碰撞。
输出信息:飞机的移动路径,并提前在飞机沿规划路径移动时可能产生碰撞的风险点之前发出预警。
飞机安全移动路径规划效果如图5所示。

4结束语
维修机位动态精准调度和飞机安全移动路径规划系统的建设,在实现维修机位资源精准调度的同时,保证飞机移动过程中的安全,能够充分发挥现有维修产能,增加潜在收益,取得效益和安全的“双赢”。
以两个维修机库(共包含3个宽体机位和5个窄体机位)的标准作业空间为例进行推演,通过机位动态精准调度,可以确保满足3架宽体机和6架窄体机同时进行C检(相当于增加了一条窄体机的C检线),按照一架宽体机约等于两架窄体机估算,在不增加硬件投资(如扩建厂房、购置设备等)的前提下,等同于增加了约10%的产能,经济效益非常可观;如果进一步考虑到通过机位实时调度可以临时插入一些A检、航前/航后检查等低级别、短时间的维修任务,经济效益还会进一步增加;将安全预警距离引入飞机移动路径规划算法的约束条件,形成的安全移动路径具有5米以上的保护区,并对维修区域95%以上的风险源进行自动标注,依据APS理论的安全风险识别原理,即可减少95%的飞机碰撞风险,从而有效降低人为因素导致的等级事件,提升我国民航维修安全保障能力。
参考文献
[1] 中国民用航空局. 智慧民航建设路线图(征求意见稿)[R].2021.
[2] 柴英. 国内公共航空运输机坪风险管控研究[D].中国劳动关系学院,2019.
[3] 郭亚惜. 南宁机场国内航班保障流程优化研究[D].广西大学,2021.
[4] 赵征,胡莉,钱媛媛,金辉,贾爱萍.基于多Agent的航空器拖曳规则优化配置方法研究[J/OL].系统仿真学报:1-12[2021-12-31].http://kns.cnki.net/ kcms/detail/11.3092.v.20210630.1015.003. html.
[5] 干浩亮,吴世桂,陈龙,宋凯,王盈君遥,韩泽宇.A-SMGCS在机场的应用研究[J].现代导航,2021,12(05):349-353.
[6] 王新,王征,徐伟.面向多个无人机站点的车辆与无人机联合配送路径问题研究[J].运筹与管理,2021,30(05):31-37.
[7] 吴靳,戴明强,王俊杰,余珊珊,余明晖.基于学徒制算法的航母舰载機保障作业调度[J/OL].中国舰船研究:1-10[2021-12-31].DOI:10.19693/ j.issn.1673-3185.02198.
[8] 万兵,韩维,梁勇,郭放.舰载机出动离场调度优化算法[J].系统工程与电子技术,2021,43(12):3624-3634.
