一种相噪测试系统误差修正技术的仿真分析
2022-04-12刘宇轩张喜洋何平李宏宇沈晓宇
刘宇轩张喜洋何 平李宏宇沈晓宇
(1.北京无线电计量测试研究所,北京100039;2.战略支援部队航天系统部装备部装备保障队,北京100094)
1 引 言
相位噪声描述了信号相位的随机起伏,它从频域上表征了信号的频率稳定度,是评价频率源性能好坏的重要指标之一。 信号相位噪声的测试有鉴相法、鉴频法、直接频谱仪法以及数字化方法等多种测试方法。 其中,鉴相法在测试相位噪声时,将信号的相位起伏转换为了易于测量的电压起伏,其测试灵敏度最高、工作频段宽且频率分辨率高,因此应用最为广泛。 国内相位噪声的测试主要用于频率源的优化和设计,随着光电子及频率综合等技术的发展,频率源的相噪指标不断提高,人们对相位噪声测试系统的测试能力和测量的准确性有了更高的要求。 为此,提出一种相位噪声测试系统的误差修正方法,针对近载频环路特性、基带信号处理频响不平坦等因素引入的测试误差进行了分析和修正,从而提高了测试系统的性能。
2 相位噪声测试系统的误差分析
2.1 鉴相法测量相位噪声
目前,市面上的相位噪声测试系统大部分采用鉴相的方法测量相位噪声,如实验室常见的E5500、PN9000 系列,其通过鉴相器将信号的随机相位起伏转变为电压起伏,测量被测信号的相位噪声,原理框图如图1 所示。
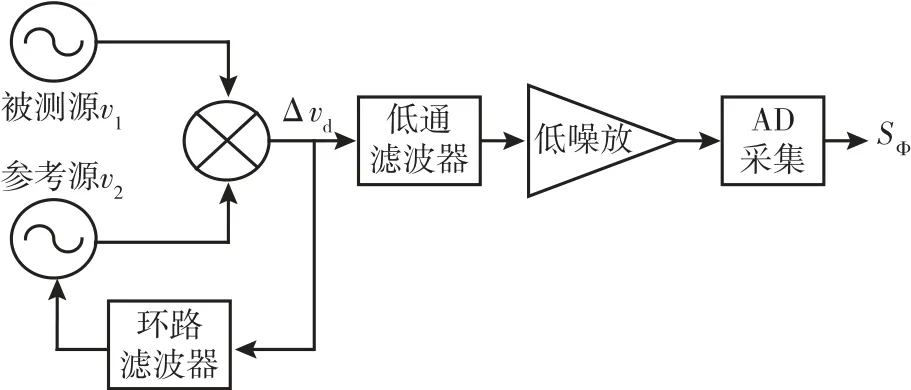
图1 基于鉴相法的相位噪声测试系统原理图Fig.1 Schematic diagram of phase noise measurement system based on phase detector
若假设被测源输入()为

参考源输入()为

式中:——被测信号的幅度;——参考信号的幅度;——载频信号的频率;()——被测信号的相位起伏;()——参考信号的相位起伏。
被测信号和参考信号进入鉴相器后,若鉴相灵敏度为k,则输出的差拍信号电压起伏Δv()可以表示为

当() <02,即相位差很小时,则有

由式(4)可以看出,被测信号通过鉴相器后输出差拍信号,相位起伏已经转变为了更易测量的电压起伏。 随后差拍信号进入由低通滤波器、低噪放等器件构成的基带信号处理通路,由AD 采集卡采集噪声电压,得到其有效值,根据式(5)可以计算其相位起伏谱密度为

式中:B——测量系统的等效分析带宽。
在相噪测量中,相比于相位起伏谱密度,单边带相位噪声()的应用更加广泛,其表现为偏离载频处,信号的相位调制边带的功率密度P与载波功率P之比,在小角度调制时()计算公式可以表示为式(6)

2.2 系统测试误差项的分析
在现有鉴相法测量原理的基础上,考虑到测量过程中各环节引入的噪声影响,给出了相位噪声测量的误差模型图,如图2 所示。
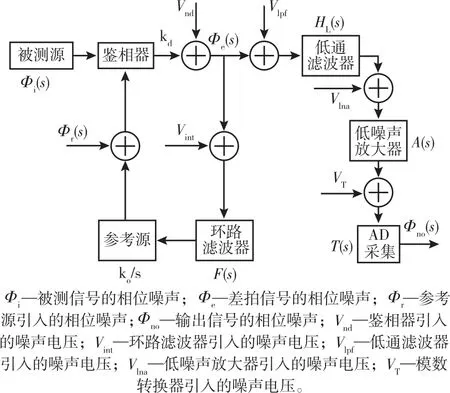
图2 相位噪声测量的误差模型图Fig.2 Error model of phase noise measurement
图2 中,若使用压控振荡器作为参考源,其控制灵敏度为k,则锁相环路开环增益可表示为

为了便于理论的分析,本文将各误差项引入的噪声都看作统计独立的平稳随机过程,通过功率谱密度线性叠加的方法近似计算它们对信号相噪测试的影响。 在相位噪声测量的误差模型中差拍信号相位噪声可以由式(8)表示
被测信号通过环路输出差拍信号,这个过程中引入了参考源的相噪、检相器的噪声电压、环路滤波器的噪声电压以及环路特性的影响。
为了便于电压信号的采集,对差拍信号进行了滤波放大处理,测得输出信号的相位噪声可以由式(9)表示

放大后的差拍信号被模数转换器采集,这个过程中引入了滤波器、放大器、AD 采集器件的误差。联立式(7)~式(9),可以得到被测信号的相位噪声与系统测得的输出信号相位噪声的关系。

通过对式(10)的分析,式中包括了相位噪声测试过程中大部分的误差项,可以得到各组成部分对测试结果的影响,找出误差修正的主要方法。
2.2.1 被测源的相位噪声()与输出信号的相位噪声()的关系
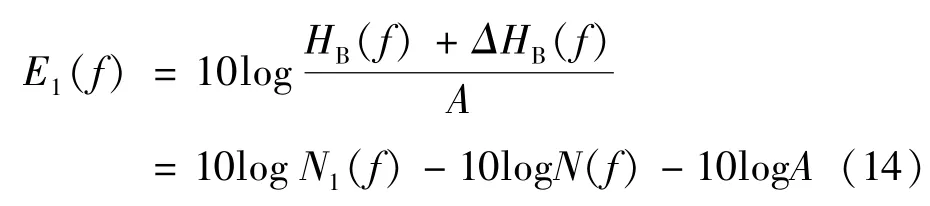
被测信号通过锁相环路和基带信号处理通路后,AD 采集卡完成噪声信号的采集,这个过程体现为式(10)中的第一项,若设环路特性为(),基带信号处理通路的频响为(),则第一项可以简化为

式中:(),(),()——测试误差项。
环路特性以及基带信号处理通路的影响因素主要有以下2 个方面。
1)环路特性的影响
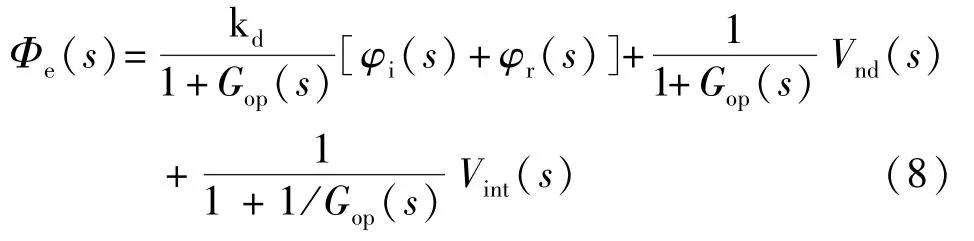
当()和()均为平坦的理论频响时,对()的影响进行分析,式(11)的理论传递函数可以用式(12)表示

式中:K——常系数项。
()的频响如图3 所示。
由图3 可以看出,其频响呈现高通特性,近载频部分测得的相位噪声存在较大的误差,需要对其引入的误差进行修正。
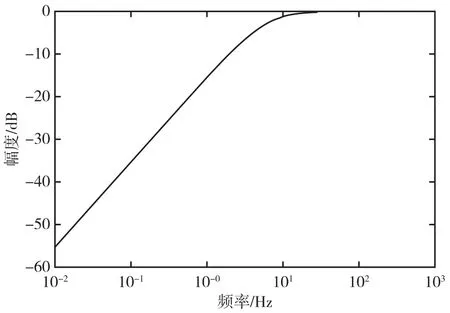
图3 环路特性的频响曲线图Fig.3 Frequency response curve of loop characteristics
2)基带信号处理通路频响不平坦的影响
在对环路特性的影响进行分析时,将()和()看作无频响波动量。 实际上,受限于器件工艺、线路阻抗匹配、温度变化等因素的影响,在频率偏移逐渐增大时,器件的增益与理论计算值存在误差,总体表现为基带信号处理通路频响不平坦的现象。基带信号处理通路的频响不平坦误差(),会直接影响相位噪声()测量的结果,是相噪测量系统误差的令一个主要来源。
2.2.2 被测源的相位噪声()与参考源相位噪声()的关系
噪声底部是相位噪声测试系统的核心指标,()是决定系统噪底水平的重要因素,直接限制了系统性能。 在相位噪声测试时,参考源相噪必须优于被测信号相噪水平,否则参考源的噪声会淹没被测源的相噪,如图4 所示。
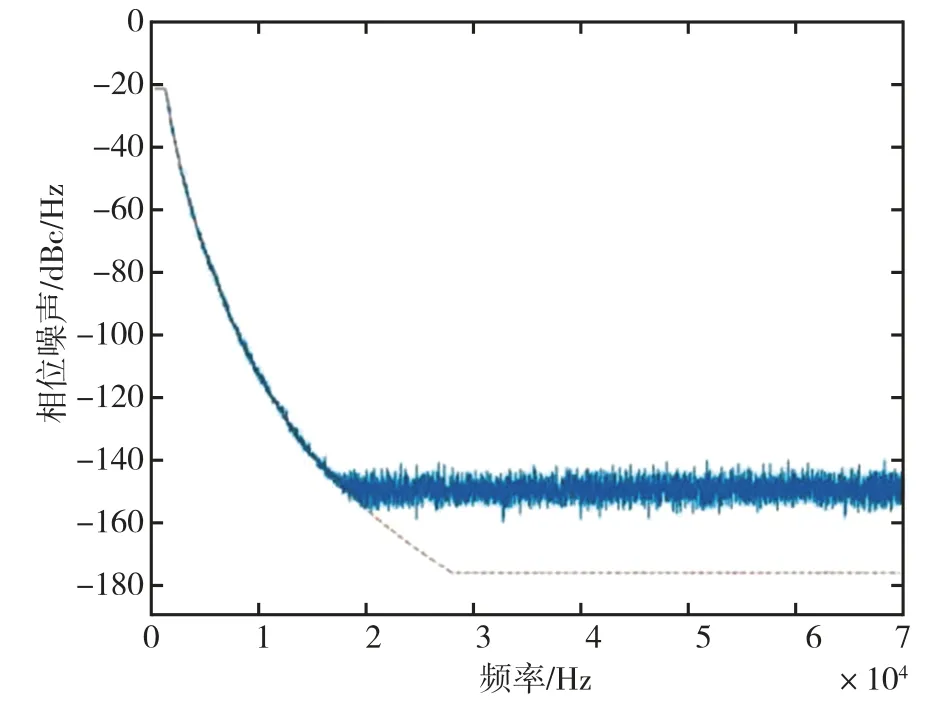
图4 参考源相噪对测试结果影响的对比图Fig.4 Comparison of the influence of reference source phase noise on measurement results
当参考源相噪水平远优于被测源相噪时,()的影响可以忽略。 但在高性能频率源等器件的测试中,由于被测源的相噪水平已十分优秀,系统参考源的相噪指标往往不能满足远优于被测源相噪指标的要求。 因此在实际测试中,参考源对系统相位噪声测试结果的影响通常是不可忽视的,需要对其引入的误差进行修正。
2.2.3 被测源的相位噪声()与鉴相器噪声电压()的关系
鉴相器位于系统的最前端,其引入的噪声电压()直接影响着测试结果的准确性。 因此相位噪声测量系统中通常使用低噪声的双平衡混频器构成鉴相器,此时器件的噪声基底很低,即使考虑到鉴相灵敏度k的影响,其引入的误差在测试过程中也不是主要的误差影响因素。
2.2.4 被测源的相位噪声()与环路滤波器噪声电压()的关系
为了保证锁相环路的稳定,环路滤波器通常使用运算放大放器来搭建,这样的滤波器具有环路滤波和相位超前校正能力。 环路滤波器引入的噪声影响主要与所选器件有关,为了减小引入的噪声量,应选用低噪声特性的运算放大器。
2.2.5 被测源的相位噪声()与低通滤波器、低噪放的噪声电压(),()的关系
被测信号通过鉴相器后输出的差拍信号电压较小,不利于直接采集。 因此需要对差拍信号进行滤波放大处理。 在信号处理的过程中会引入低通滤波器的噪声电压()、低噪放的噪声电压()。 由式(10)可以看出,其造成的误差量,除了与自身器件特性有关外,还与k和()有关,需要综合考虑它们的取值。
2.2.6 被测源的相位噪声()与模数转换器引入误差的关系
模数转换器(ADC)可以将采集到的模拟信号转换为数字信号,其有着精度高、结构简单、功耗低等优点,广泛应用于信号采集、工业生产等领域。使用ADC 采集系统的输出信号时,器件内部转换原理如图5 所示。

图5 模数转换原理图Fig.5 Schematic diagram of ADC
经过处理的模拟信号()经采样保持电路转换为数字信号,在经过量化编码后产生数字信号(),上位机完成其噪声功率谱密度的计算和显示。 受ADC 器件位数、时钟抖动和自身误差等因素的影响,()和()并非理论状态,器件存在转换误差。 ADC 器件的采集误差为实际输出数值与理论数值之间的偏差,常用积分非线性误差表示,其对测试结果的影响与采集到的电压大小有关。
在上述相位噪声测量系统的误差因素分析中,对近载频环路特性、基带信号处理通路频响不平坦特性、参考源、噪声采集模块这些主要误差因素进行了修正。 对于鉴相器、环路滤波器和放大器,通过选用合适的低噪声器件,可以有效减小它们对测试结果的影响。 因此,不再进行单独修正。
3 误差修正模型的构建及仿真
3.1 误差修正模型的构建
本节构建了一种基于高斯白噪声多点注入技术的相位噪声测试系统误差修正模型,其结构如图6 所示。 在误差修正模型中,将高斯白噪声从不同点位注入相位噪声测试系统,通过系统输出信号的功率谱密度与高斯白噪声源输出信号的功率谱密度对比,可以得到对应通路测试误差的修正值,从而实现对环路特性和基带通路频响不平坦误差的修正。
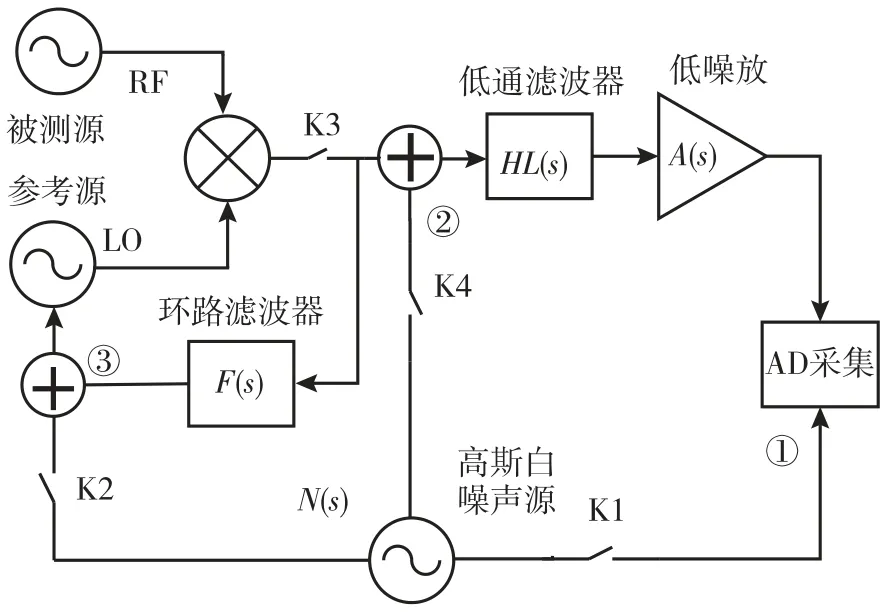
图6 相位噪声测试系统误差修正模型的原理图Fig.6 Schematic diagram of error correction model of phase noise measurement system
在图6 所示的误差修正模型中,高斯白噪声源通过数字方法产生连续的高斯白噪声。 相比物理过程直接产生的高斯白噪声,数字方法有着环境因素影响小、功率可调节、易于实现的优点。
高斯白噪声信号通过开关来选择注入系统的不同位置,其实现的功能如表1 所示。

表1 高斯白噪声从不同点位注入系统的功能Tab.1 Function table of Gaussian white noise injection system from different positions
当开关K1 闭合时,对信号的功率谱密度多次平均后进行自校,其结果如图7 所示。 在后续的校准过程中,使用自校后的高斯白噪声进行误差修正,结果会更加精确。

图7 自校后的高斯白噪声功率谱结果图Fig.7 Results of Gaussian white noise power spectrum after self correction
当K4 闭合时,系统修正基带信号处理通路的频响不平坦特性。 高斯白噪声在误差修正过程中起到参考标准的作用,若其自校测得的功率谱为()。 高斯白噪声注入基带信号处理通路后,测得系统输出信号的功率谱为(),可以表示为

式中:()——基带通路理论频响;()——频响波动误差。
若设置低噪声放大器的理论放大值为倍,则基带信号处理通路频响不平坦的误差修正值()可以表示为
当K2、K3 闭合时,系统对环路特性进行修正。高斯白噪声经过加法器注入锁相环路后,测得系统输出信号的功率谱为(),可以表示为

环路特性的误差修正值()可以表示为

设计的相位噪声测试系统误差修正模型的工作流程如图8 所示。

图8 误差修正流程图Fig.8 Flowchart of error correction
3.2 误差修正模型的仿真分析
3.2.1 基带信号处理通路频响误差的修正
利用ADS 仿真软件,使用低噪声器件AD797 和2SC3356 设计了滤波放大电路,通过开关切换实现不同频段信号的处理,其频响如图9 和图10 所示。
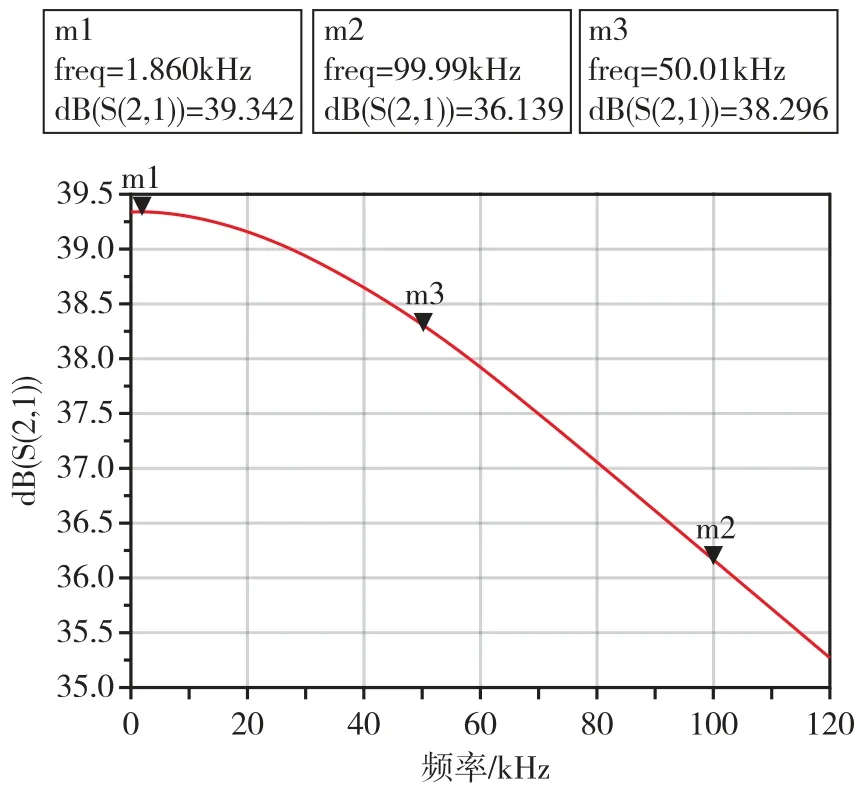
图9 低频部分的频响曲线图Fig.9 Frequency response curve of the low frequency part
由图10 可以看出,频率变化引起增益改变,其频响()并不是一条理论的直线,存在频响波动误差()。
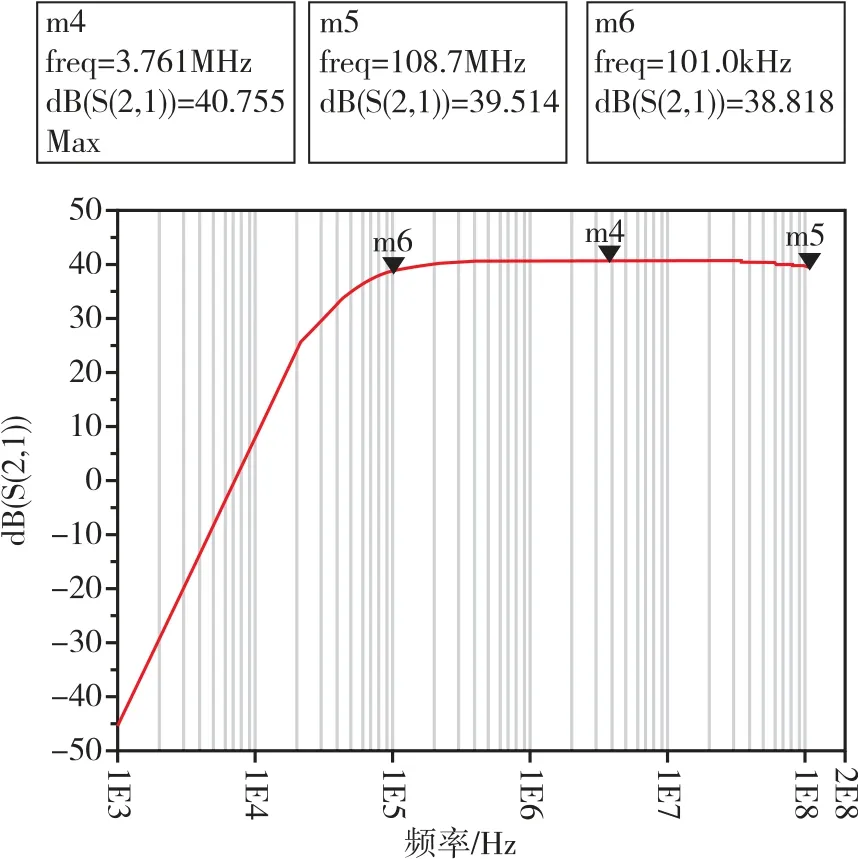
图10 高频部分的频响曲线图Fig.10 Frequency response curve of the high frequency part
当开关K4 闭合时,高斯白噪声注入基带信号处理通路后,采集系统输出信号并计算其功率谱。同时为了便于比较,将高斯白噪声源输出信号的功率谱进行了平移,平移的大小为低噪声放大器的理论放大值,此时基带信号处理通路的频响波动特性如图11 所示,部分频响波动的误差修正值()如表2 所示。
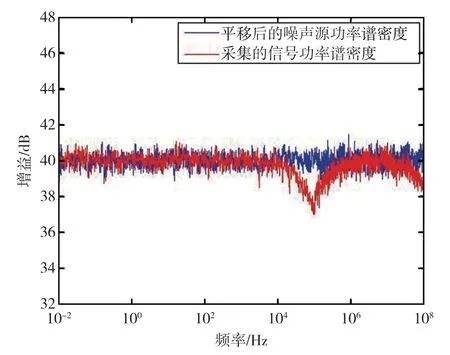
图11 基带信号处理通路的频响波动图Fig.11 Frequency response fluctuation diagram of baseband signal processing path
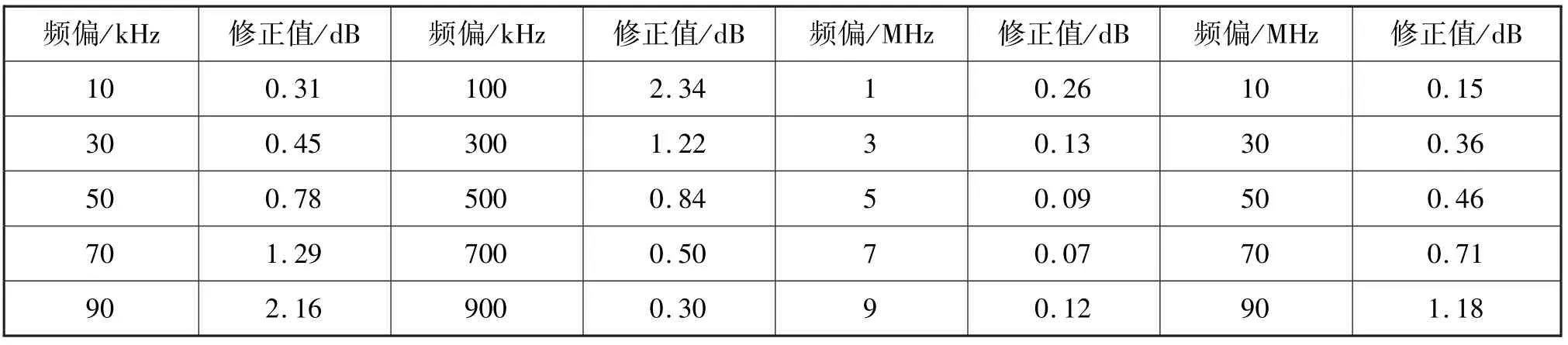
表2 部分基带信号处理通路频响误差的修正值Tab.2 Correction of frequency response error of partial baseband processing path
3.2.2 近载频环路特性的修正
为了确保锁相环路稳定工作,环路滤波器采用如图12 所示的有源比例积分滤波器构成,鉴相灵敏度k设置为220mV/rad,控制灵敏度k为2Hz/V。
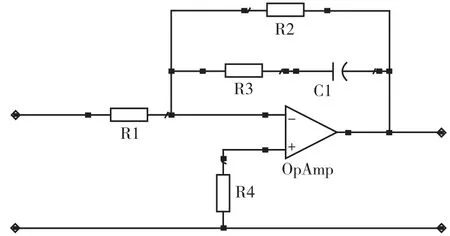
图12 环路滤波器的结构示意图Fig.12 Schematic diagram of the structure of the loop filter
当放大器满足深度负反馈时,相位余量充足,环路可以稳定工作。 当K2、K3 开关闭合后,高斯白噪声通过功率调节后注入环路。 计算此时系统输出信号的功率谱,其与高斯白噪声源输出信号的功率谱比较,共同构成了如图13 所示的环路特性曲线图,()的部分误差修正值如表3 所示。

图13 环路特性的仿真结果图Fig.13 Simulation result graph of loop characteristic

表3 部分环路特性的误差修正值Tab.3 Error correction values for partial loop characteristics
3.2.3 参考源引入误差的修正
系统在测试时,若参考源的相位噪声水平与被测信号的相位噪声水平相差不大时,需要考虑其引入的测试误差。 当参考源的相噪r和被测信号相噪i的差值确定时,式(17)给出了计算参考源引入的测试误差为

测试误差与相噪差值间的关系如图14 所示。当已知参考源的相噪低于被测信号相噪水平15dB时,往往可以忽略参考源对测量结果的影响,否则应根据式(17)及相噪测试结果进行误差修正。
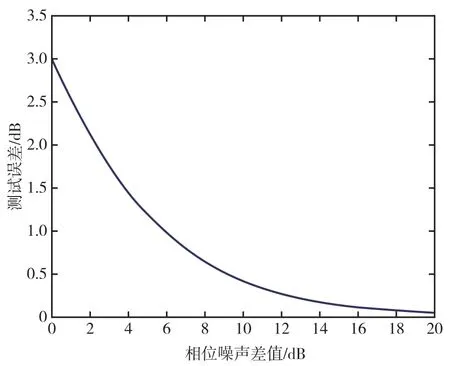
图14 参考源对测试误差影响的仿真结果图Fig.14 Simulation result graph of the influence of the reference source on the test error
3.2.4 噪声采集的误差修正
噪声信号采集时,AD 转换器起到电压采集的作用,其自身特性会引起测量的误差。 若使用的模数转换器为14 位ADC,其峰峰值为1V,式(18)给出了其最低有效位为

ADC 器件的积分非线性表征了实际转换电平与理想转换电平的偏离程度,若其积分非线性误差(INL)为5LSB,则转换误差ΔU可以通过式(19)计算
式中:——采集电压的量化数字。
转换误差与采集电压的部分关系如图15 所示,可以看出在采集电压较小时,积分非线性引起的转换误差较大。

图15 输入电压大小对转换误差的影响结果图Fig.15 Effect result of input voltage on conversion error
在实际测试时,通常将输入电压幅值置于可量化电压峰值的1/3~2/3 的位置时,此时转换误差最大约为0.008dB,对输出信号相位噪声的影响可以忽略。
在相位噪声测试系统误差修正模型的仿真和分析中,主要对基带信号处理通路的频响波动误差、近载频环路特性误差、噪声采集误差以及参考源引入的误差进行了修正。 当鉴相器、滤波器、放大器等器件均为低噪声器件时,相位噪声测试系统在误差修正前后,对同一信号进行测试的结果如图16 所示。
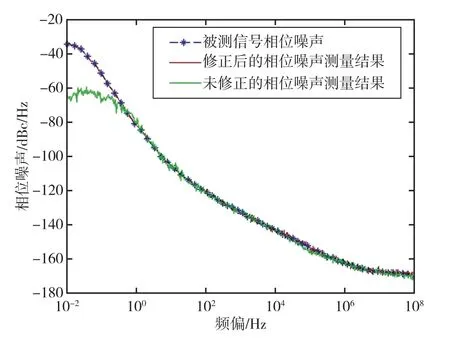
图16 相位噪声测试系统误差修正的结果图Fig.16 Error correction result diagram of phase noise measurement system
误差修正前后,相噪测试结果的部分误差值如表4 所示。 可以看出,系统经过误差修正后,测试误差明显减小,仿真得到的相位噪声曲线和被测信号的理论相噪曲线基本重合,相位噪声的测量准确性得到了提高。

表4 误差修正前后部分相噪测试结果的误差Tab.4 Error of some phase noise test results before and after error correction
4 误差修正后相噪测试系统的不确定度分析
4.1 高斯白噪声源输出信号不稳定引入的标准不确定度分量u1
高斯白噪声源产生信号的功率范围设置在( -30~10)dBm 范围内,受模数转换等过程影响,输出信号的功率存在随机起伏,最大误差为1.00dB,认为是均匀分布,则有
4.2 基带信号处理通路频响修正误差引入的标准不确定度分量u2
滤波器、低噪放等器件的频响存在随机波动,使得误差修正后的结果存在一定的误差,引入的修正误差最大为0.82dB 左右,认为是均匀分布,则有
4.3 环路特性修正误差引入的不确定度分量u3
硬件实现中,环路内部存在功率调整等环节,会引起信号功率的随机波动,由此引起的环路特性修正误差最大为030dB 左右,认为是均匀分布,则有
4.4 参考源引入的标准不确定度分量u4
当参考源相噪优于被测相噪10dB 时,参考源引起的测试误差最大为0.40dB,认为是均匀分布,则有
4.5 噪声采集引入的标准不确定度分量u5
噪声采集过程中,当输入电压幅值置于量化电压峰峰值的1/3 ~2/3 位置时,转换误差最大约为0008dB,认为是均匀分布,则有
4.6 正交保持误差引入的标准不确定度分量u6
被测信号与参考信号满足正交条件时,正交保持的误差最大为005dB,认为是均匀分布,则有

4.7 鉴相器频响不平坦度引入的标准不确定度分量u7
鉴相器频响不平坦引起的误差最大为0.20dB,认为是均匀分布,则有

4.8 阻抗失配误差引入的标准不确定度分量u8
测试系统器件间存在插入损耗,引入的阻抗失配误差最大为0.15dB,均匀分布,则有

4.9 合成标准不确定度uc
相位噪声测试系统误差修正后,其测试结果的合成标准不确定度为

5 结束语
误差修正是相位噪声测试系统研制过程中必不可少的一个环节,它直接影响着系统的测试能力。 本文提出的误差修正方法,对相位噪声测试系统的主要测试误差项进行了修正,通过将平稳的高斯白噪声信号从不同位置注入系统,修正了环路特性和基带信号处理通路频响不平坦特性引入的误差,同时给出了参考源自身和噪声采集对测试结果的影响,共同完成相位噪声测试系统的误差修正工作。
