基于实时卫星共视技术的时间码在线校准系统
2022-04-12帆陈学军张然毛新凯
杨 帆陈学军张 然毛新凯
(1.北京无线电计量测试研究所,北京100039;2.中国西安卫星测控中心,西安710000)
1 引 言
随着科技的发展,时间同步在各种电子系统尤其是武器系统中的重要性日益突显。 为了完成多军种、多系统的信息融合、协同作战,各系统必须工作在统一的时空坐标体系之内。 为此,我军的各作战单元大都配备了高精度的时间统一设备。 这些时统设备大多集成于武器系统中,不宜拆卸,因此无法做到周期性送交计量部门予以计量校准。 大量装备的时统设备未经校准,为我军的时间统一体系带来了严重的隐患。 因此,研究解决高精度时统设备的现场校准问题具有重要的意义。
目前,国内外针对时统设备的现场校准器都是以GPS/BDS 单向授时法获得参考时间。 被测时统设备也大多是通过接收北斗等卫星导航系统信号或IRIG-B 码等有线信号获取初始时间,内部通过铷原子钟或高稳晶振对时间进行保持,对外输出1PPS,1PPM,1PPH,IRIG-B(DC)码,IRIG-B(AC)码,PTP 等时间信号,为用时系统提供高精度的时间统一服务。 可见,现有的时统设备现场校准仪器采用内置C/A 码GPS 接收机,定时准确度与被测时统设备在同一量级,无法满足校准时的量值溯源需求。 而且,目前的现场校准仪器与守时实验室之间没有直接的实时溯源关系,仪器本身对计量结果引入的不确定度较大。
为了解决时统设备现场校准不确定度大的问题,本文提出一种可实时溯源至守时实验室标准时间的时统设备现场校准方案,为现场校准提供稳定可靠的时间参考,有效减小现场校准仪器引入的不确定度。 GNSS 卫星共视时间传递技术是目前性价比最高的时间频率传递方法,实现过程简单,时间传递不确定度小,是建立校准现场与守时实验室之间实时在线溯源链路的最佳选择。
本文基于实时卫星共视技术建立现场校准仪器与守时实验室之间的实时溯源链路;利用实时共视比对结果对现场铷钟进行驯服,产生时统设备现场校准所需要的参考源。 该参考源实时溯源至守时实验室标准时间,定时准确度高,溯源不确定度小,更加稳定可靠。
2 时间码在线校准原理与校准系统设计
2.1 实时共视溯源链路设计
通过对传统的卫星共视数据处理技术进行改进,建立时统设备校准现场与守时实验室的实时溯源链路。 改进体现在两个方面:改进共视数据处理方式,实现连续无间隙实时比对;利用实时数据传输技术实现共视数据的实时交互。
选用高精度接收机板卡和高速数据处理模块来满足连续跟踪的要求,采用连续的时间比对方法,以100s 作为一个完整的观测周期,两个观测周期之间无缝连接,不再预留相邻跟踪周期之前的准备时间和数据处理时间,当上一个跟踪周期结束后,立即进入下一个跟踪周期。 该方法的优势在于可以对时频信号的偶发、突跳等现象进行检测,并且实现了无间隙的连续比对,提高数据利用率,增强共视的实时性。 在达到实时共视目的的同时,为了提高实时共视精度,每个观测周期(100s)内的数据处理分两次采用最小二乘拟合算法:
第一次,将100 个数据等分为10 份,每份10 个观测值,对10 份数据分别进行最小二乘线性拟合,取中间值作为拟合结果,共得到10 个拟合值;
第二次,将10 个拟合值再次进行最小二乘线性拟合,取中间值,作为本观测周期(100s)的观测结果。
守时实验室的本地比对结果(含UTC(k)与导航实验室标准时间之间的偏差)由北斗短报文链路实时发送给校准现场,校准现场对实时共视数据进行处理,并以此为参考对校准现场时间源(通常为铷钟)进行驯服。
2.2 基于实时共视的铷钟驯服技术
利用实时共视链路获得守时实验室参考时间,并以此为参考,对铷钟进行驯服。 驯服过程中,实时判断共视时差信号是否有效。 当测量到的时间差信号有效时,通过卡尔曼算法对计算得到钟差数据进行滤波,消除噪声对时间信号的影响。 然后通过驯服算法得到可控铷钟的控制字。 为了提高系统的稳定性,驯服铷钟的控制值还需要经过PID 算法,消除驯服系统的静态误差,提高系统的稳定性,此时得到的数字是铷钟的精确控制值,调节输铷钟的输出频率。 当共视时差信号丢失或者测量得到的时间差信号无效时,从GNSS 系统获得1PPS 作为参考信号,FPGA 以本地的铷钟作为系统的时钟源,分频生成与外部时间源输入的1PPS 相同的方波周期信号,比较这两个周期信号,得到时差数据。 利用卡尔曼算法对计算得到钟差数据进行滤波,再经过PID 控制后得到铷钟控制字,对铷钟频率进行调整。 基于快速共视的铷原子钟驯服算法流程如图1 所示。

图1 基于卫星共视的铷原子钟驯服算法流程图Fig.1 Flow chart of Ru-clock controlled algorithm process based on satellite common view
2.3 时间码在线校准的精细化修正技术
在传统的时间码测量中,只能以时间码测量仪的时间参考作为标准,得到被测时间码与时间参考之间的时差。 通过卫星共视技术,可以实时的获取本地时间参考与守时试验室之间的时间差。 因此,可以利用该时差对时间码测量结果进行修正。这样,本地时间参考在测量中只起到中间媒介的作用,即使本地参考与UTC 存在偏差,在进行精细化修正之后,偏差也被消除。 实际给出的测量结果为被测时间码信号与实验室标准时间之间的时间差。因此,可以极大地提高测量精度。 时间码测量结果精细化修正的方法如图2 所示。
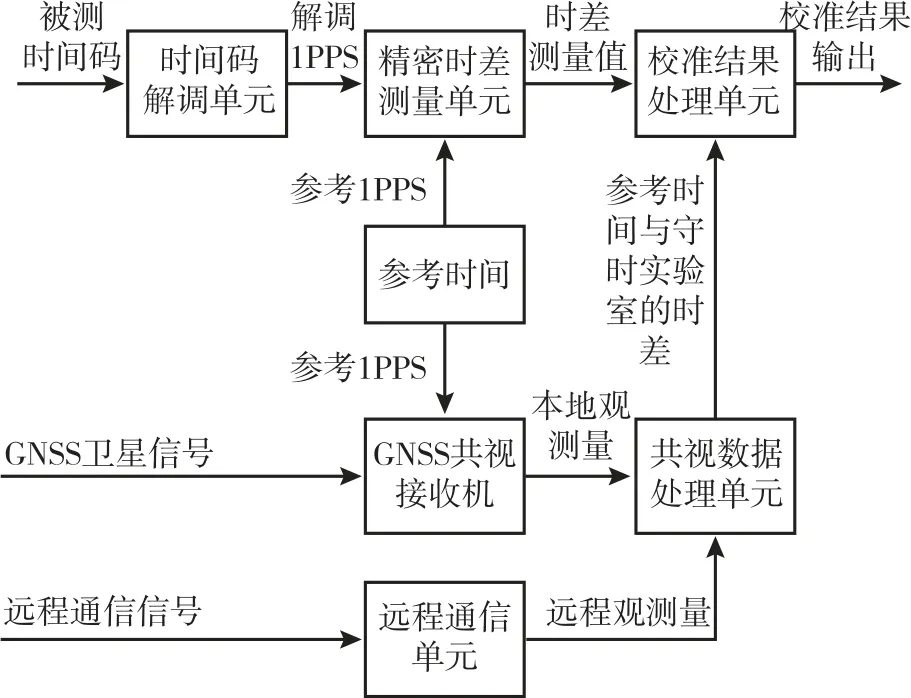
图2 时间码测量结果精细化修正框图Fig.2 Block diagram of time code measurement results refined correction
通过卫星共视比对技术,获得了实验室标准时间t与校准现场标准时间(共视驯服铷钟)t之间的时差,即

在校准现场,以共视驯服铷钟t的1PPS 作参考,对时间码信号t进行校准,校准结果可表示为

那么,将式(1)和式(2)结合可以得到

可见,经过精细化修正后,时间码测量结果可直接归算到被测时间码信号与实验室标准时间的偏差。 由于实验室标准时间比现场校准的标准时间准确度、稳定度更好,因此精细化修正后可以极大减小测量结果的不确定度。
2.4 时间码在线校准系统设计
本文设计时间码在线校准系统,搭建基于实时共视的时间码现场校准平台。 校准平台主要由3部分组成:实时共视数据发播设备、基于实时共视技术的时间码校准设备、以及实时比对链路。 实时共视数据发播设备放置于守时实验室,用于为校准现场传递守时实验室的高精度时间频率标准。 基于实时共视技术的时间码校准设备放置于时统设备校准现场,用于实现时间码的在线高精度时间校准。 两个设备之间利用共视技术进行实时比对,采用北斗短报文等方式进行实时数据交互。 基于实时共视技术的时间码校准设备实时接收实时共视数据发播设备的共视数据,经数据处理之后得到两地共视时差,并以该时差为参考对现场的频率源进行调整,使现场的频率源紧密跟踪于守时实验室的标准时间。 时间码在线校准平台组成如图3所示。
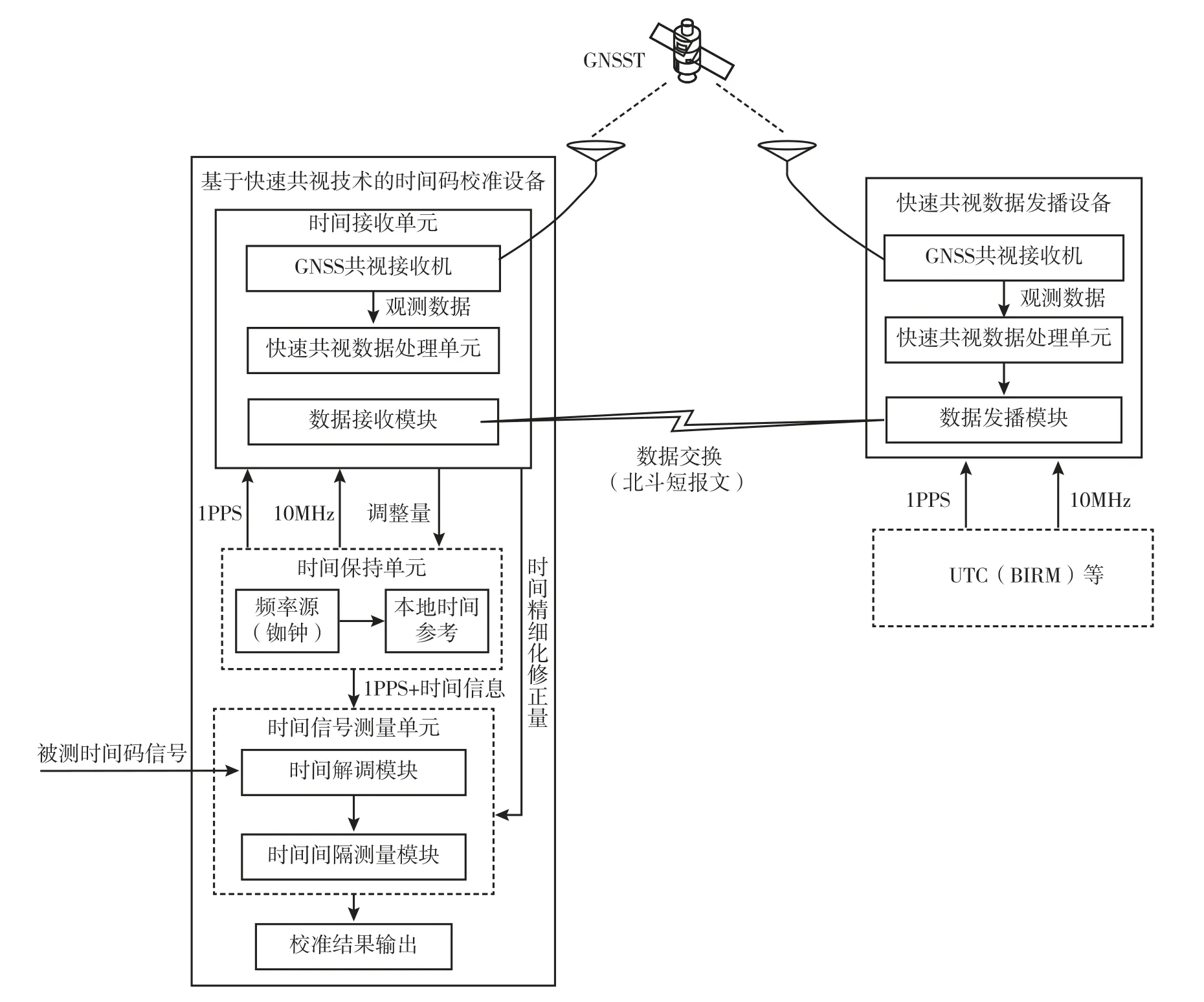
图3 基于实时共视的时间码现场校准系统框图Fig.3 Block diagram of time code field calibration system besed on real-time satellite common view
3 试验结果分析
与传统的在线校准平台相比,本文的时间码在线校准平台特点在于,参考源是基于共视驯服铷钟技术产生的,可同步至实验室标准时间。 为了验证该在线校准平台的参考源性能,分别开展GPS/BDS单向法驯服铷钟和共视法驯服铷钟试验,以北京无线电计量测试研究所标准时间UTC(BIRM)为参考,比较两种驯服方式下的铷钟1PPS 同步偏差。试验结果显示视法驯服铷钟1PPS 同步偏差更小。
GPS/BDS 单向法驯服铷钟与UTC(BIRM)的比对曲线如图4 所示,以及GPS/BDS 共视法驯服铷钟与UTC(BIRM)的比对曲线如图5 所示。 从图中可以看出,由于导航信号在单向授时过程中噪声影响明显,GPS/BDS 驯服铷钟的测试数据抖动较大,峰峰值为40ns 左右,标准偏差为8.0ns;GPS/BDS 共视法驯服铷钟数据抖动明显减小,峰峰值为10ns 左右,标准偏差为2.2ns。
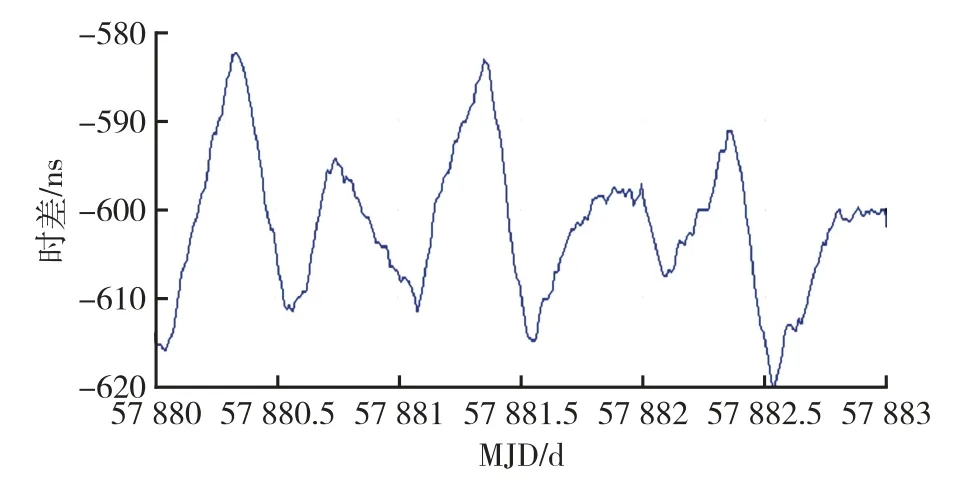
图4 GPS/BDS 单向法驯服铷钟定时偏差曲线图Fig.4 Curve of taming Ru-clock timing deviation based on GPS/BDS one-way method
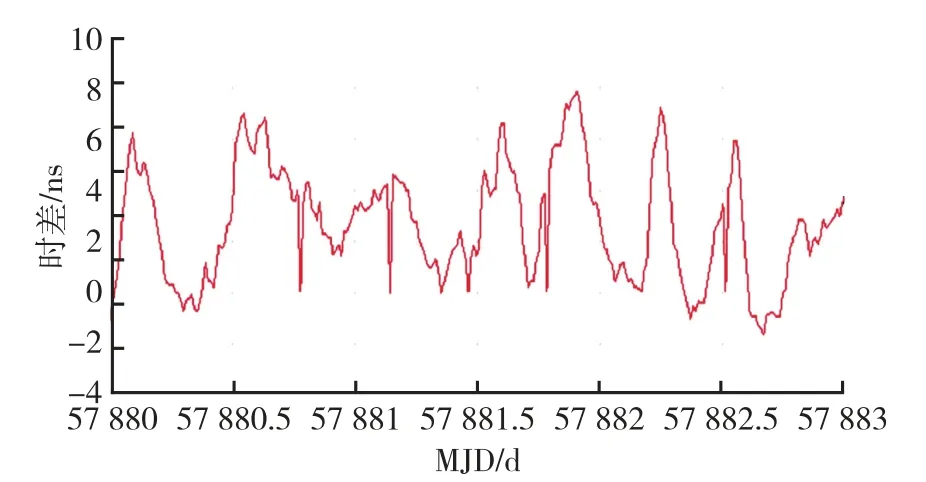
图5 GPS/BDS 共视法驯服铷钟定时偏差曲线图Fig.5 Curve of taming Ru-clock timing deviation based on GPS/BDS common view method
4 结束语
本文论述了一种基于实时卫星共视技术的时间参数现场校准平台设计方法,针对时统设备现场校准时如何获得高精度的时间参考这一问题提出了一种设计思路。 并以北京无线电计量测试研究所标准时间UTC(BIRM)为参考,分别测量GPS/BDS 单向法驯服铷钟和共视法驯服铷钟的1PPS 同步偏差。 从试验数据可见,本方法提出的方法相对于当前常用的GPS 单向法具有明显的指标优势。 且本方法原理简单,适合小型化设计,相对于卫星双向等手段成本低廉,适合在时间参数现场校准领域推广。
