基于CAN报文的转向力测试方法
2022-04-02陈世平
马 驹,陈世平,陈 思
(威马汽车科技集团有限公司 成都研究院,四川 成都 610110)
伴随着智能科技的发展,汽车行业从传统的燃油汽车向智能汽车方向发生转变,转向系统也由最开始的传统机械式向电子化、智能化发展,甚至是取消传统机械传动结的线控转向系统也开始逐渐走进视野。现代智能汽车上普遍采用的电动助力转向系统相比较于传统的机械式转向系统来说,手感更轻,更柔顺平滑。其中,方向盘的转向力是转向系统关键参数,它影响着驾驶人员对路感的正确判断,关系着整车的舒适性及行驶安全性,所以需要对实车进行方向盘转向力的测试,看实测值是否满足要求。对于转向力的测试,通常情况下,我们采用力矩方向盘和数据采集仪进行相关实验:把力矩方向盘固定在转向盘上,通过力矩方向盘可以采集到转向时的转向力矩、转向角度以及转动速度的大小。但是传统的测量方法前期准备时间长,仪器设备安装和拆卸较为麻烦,操作不便,后续数据结果处理也复杂繁琐。
随着车辆转向系统配置的升级,带来了转向助力形式的改变,也增加了新的测试的可能性。故本文提出一种新的方法,通过控制器局域网络(Controller Area Network, CAN)的电动助力转向管柱(Electric Power Steering Column, EPS)节点发出的报文来读取电动助力转向管柱内部自带的扭矩传感器和转角传感器的数值,来记录、测量转向力。由于当代汽车都装配有电动助力转向管柱,并通过CAN总线进行整车通讯,所以在整车转向性能测试验证时,都可以通过CAN报文来读取数据,这种方法可以极大程度上减少前期试验准备的工作量,不再需要额外安装外部设备,减少了安装误差,提升了测试数据的精度。
1 CAN总线
近二十年来,随着汽车产业的电子化,信息化程度越来越高,整车上装配的由电子控制单元控制的零部件数量也越发的增多,特别是纯电动汽车行业。随着各种传感器,集成电路,智能芯片等电子元器件在整车上的广泛使用,在提升汽车动力性,经济型,舒适性,行驶稳定性和安全性的同时,也会带来相应的问题,比如:电子设备的大量使用增加了布线的长度、也让布线的复杂性增大、运行的可靠性降低以及售后维修的成本较高等。
在车辆的实际使用中,由于各子系统之间的控制器对某一个传感器信号可能存在共用需求,并且对这些信号的实时性的要求又因为数据的跟新速率和控制周期不同而有差别,更重要的是整车上搭载的传感器和控制器等,来自不同的供应商,可能存在不同的语言或者评价规范,所以有必要采用一种全球通用的标准来解决状态信号和控制信息的传输问题,因此,设计出了多种适用于汽车使用环境的汽车网络技术,其中最常用的就是CAN总线协议。它是一种串行多主机控制器局域网的总线,支持差分收发,因而适合高干扰环境,并具有较远的传输距离;在功能上,CAN总线可以简化车身线路布局,提高车身控制系统的稳定性,使整车在控制方面更智能、快捷、精准,特别适合在汽车控制系统使用。
1.1 CAN总线原理
CAN总线使用的是串行数据传输方式,这种通讯协议还支持多主控制器,可以满足整车上对通讯节点需求。其工作原理如图 1所示,当总线上其中一个节点准备向其他节点发送数据时,该节点的控制器将会把待传输的数据和自己的标识符传送至本站的CAN芯片,在收到总线分配的传输指令后,CAN芯片将会把待传输的数据根据协议组织转换成对应格式的报文并通过广播形式传输到总线上的各个节点。每个网络节点都可以接收到这一帧报文,并通过标识符解析出当前节点是否需要接收此帧报文信息;因为每个节点的标识符都具有唯一性,总线还可以通过标识符来定义报文传输的优先级。
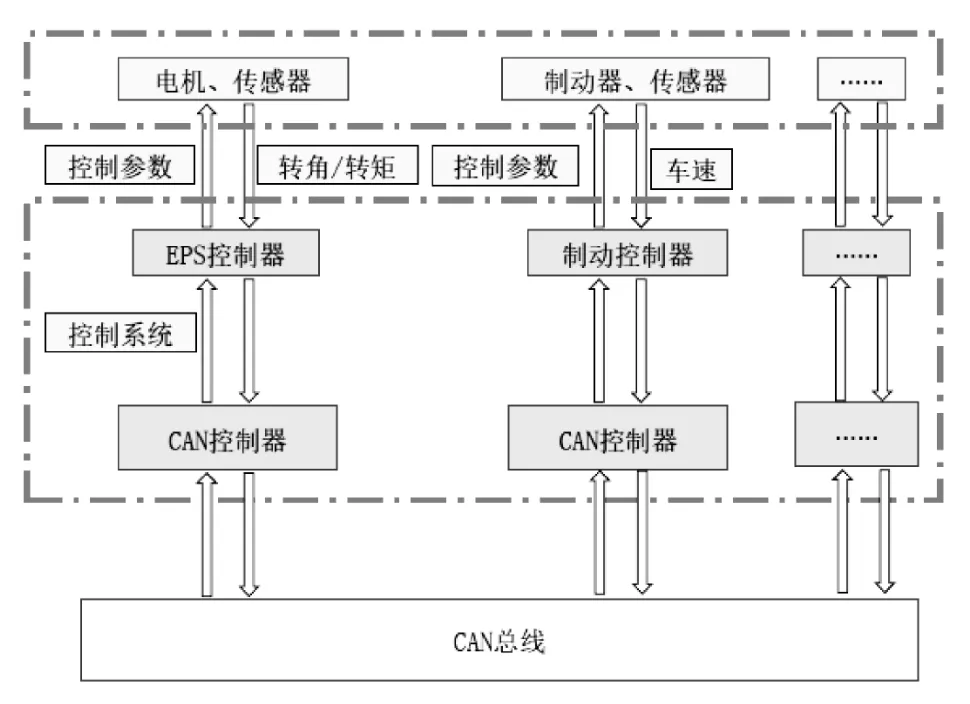
图1 CAN总线通讯原理
1.2 CAN总线优点
通过对各控制器传输接口进行相关CAN协议的通用规定,可以让控制器中的CAN总线模块的CAN控制器完成通讯功能,比如信息缓冲和滤波;让CAN收发器作为CAN控制器和物理总线之间的接口,来实现逻辑电平信号的转换,比如将采集的电信号转换成数字信号,再以特定的编码方式转换成CAN报文。
在CAN网络上,任意一个节点都可以在任何时候主动的向其他节点发送报文;在报文的标识符上,又将节点分为了不同的优先级来保证重要的数据可以率先发送到各个节点,减少了总线冲突仲裁的时间,提升了传输效率;并且CAN总线上的通讯节点可对报文的标识符进行滤波实现点对点、点对多以及全局广播等传播方式来接收总线上的数据。
通过CAN总线技术,可以把整车上各个传感器上采集的实时数据通过报文的形式发送到CAN线上,再传输到各个节点所代表的各子系统的控制器上,CAN总线相当于一个数据传送、分享的一个媒介平台,各个节点控制器都可以在上面获取到所需要的各种信息,比如智能辅助驾驶的域控制器需要通过CAN总线来接收EPS的方向盘转角信号以及汽车电子稳定控制系统(Electronic Stability Controller,ESC)的车速信号。这样的信息传输方式使整车各个系统之间可以协调运转、信息共享,保证行驶的安全性、舒适性和可靠性。
2 转向力测试方法
2.1 CAN报文测试
由于当代智能汽车普遍需要达到L2、L3甚至L4级别的自动驾驶,要求转向系统能够提供方向盘转角信号,转向助力电机需要根据实时方向盘手力矩、方向盘转动速度的以及当前车速进行综合判断来提供相应的助力,故电动助力转向管柱内部皆配置有高精度转角传感器和扭矩传感器,可以实时的监测到转向系统方向盘转角信号和转向扭矩信号,并在CAN总线上EPS通讯节点处将采集到的实时数据转化成报文,通过CAN总线传输到其他各控制器节点处进行报文解析后,即可获取到转向系统的当前状态信息。所以,可以通过读取CAN总线上EPS节点处发送的报文并对其进行解析,从而获取到转向力矩信息。
2.1.1 CAN报文测试设备及方法
实验设备:CAN网络分析测试设备、相关软件、电脑。
实验方法:
(1)设备连接:将 CAN网络分析测试设备的USB端连接在笔记本电脑端,测试设备的另外一端连接在整车网络通讯接口上,这个网络通讯接口可以输出整车上接入CAN总线上的节点的传感器的数据信息。
(2)软件设置:在电脑端的 CAN总线读取软件Canalyzer中添加DBC解析文件,设置数据通道,查看EPS的方向盘转角信息、转速信息、转动力矩信息、整车车速信息等等。整车数据采集方式如图2所示。

图2 CAN报文数据采集设备
(3)根据原地转向力的试验操作规范:测试时从转向中间位置向左转向到左极限,然后再右转至右极限,最后再转回到中间位置,为一个转向循环。从开始转动方向盘时录制保存CAN总线上的报文,直到试验完成。
通常情况下,车辆在原地怠速转向时,转向工况最为恶劣,此时转向力最大,故主要针对怠速工况下的转向力进行讨论。
2.1.2 CAN报文测试数据
在测试过程中,通过电脑可以实时地、直观看到采集的数据曲线,可初步对试验结果进行把控:排查变化过大、转向不平滑等不满足试验要求的工况,这样可以减少工作量,提升工作效率。
将录制好的CAN报文,在Canalyzer软件中,进行数据的添加、回放,将总线上电动助力转向管柱节点的方向盘的转角信号,转向盘转向力矩信号以及力矩方向信号通过图形窗口进行图形数据的查看,如图 3所示,其中力矩方向信号表示此时转向力矩的方向。

图3 CAN报文信号
将图形数据导出保存成数据文件,在 Excel中进行数据的处理整合,得到的方向盘转向力矩和转角关系曲线,如图4所示。
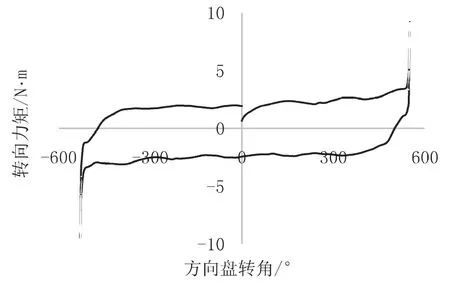
图4 CAN报文转角-转矩关系曲线
由图 4可以看出,转向力矩曲线平滑,线性度较好,力矩整体较小,保证了转向时的舒适性,满足规范要求;在转向中间位置处,转向力矩变化平缓,约为2 N·m左右;在大角度转向时,力矩逐渐增大,保证驾驶人员信心感。在极限位置处,由于操纵的误差的存在,导致在转向器安装止点处发生撞击,造成了转向力矩的突然增大,与实际相符。
2.2 力矩方向盘测试
将力矩方向盘按规范要求固定安装在转向盘上,连接适配的数据采集仪。当开始采集数据后,按照转向力的试验操作规范操作完成至少三次完整的转向循环。将通过力矩方向盘采集的数据在专用软件中进行查看,导出数据到Excel中进行后处理,得到的方向盘转角对应的转向力曲线如图5所示。

图5 测量仪转角-转矩关系曲线
从图 5可以看出:整车在怠速工况下,方向盘转向力整体的线性度较好,曲线变化平缓,满足标准要求;在转向中间位置处转向力的变化较小,约为2 N·m左右;在大角度转向时,转向力逐渐增大,符合安全驾驶要求。
2.3 CAN报文可靠性分析
由于转向管柱的报文发送周期为20 ms,而力矩方向盘采样频率为 100 Hz,所以将力矩方向盘采集的数据进行一定的处理来降低频率,方便数据对比。通过测量仪和CAN报文两种方式得到的各转向角度下方向盘的转向力的曲线如图6所示。

图6 两种测量方法转角-转向力矩曲线
由图形可以看出,两种方式得到的转角-转向力矩图形趋势基本一致,数值大小基本相近;转向力普遍较小,转向轻便,且转向力矩变化平顺,不同角度下都能对驾驶员有较好的力矩反馈,符合驾驶习惯,满足转向性能规范要求。这也表明通过CAN报文测试转向力的方法是可行的,准确的。
在怠速工况转向过程的测试数据中,以 60°的转向角为间隔,提取相应转角下的转向力矩值。通过CAN报文和力矩方向盘测得的转向力矩数据如表1所示。
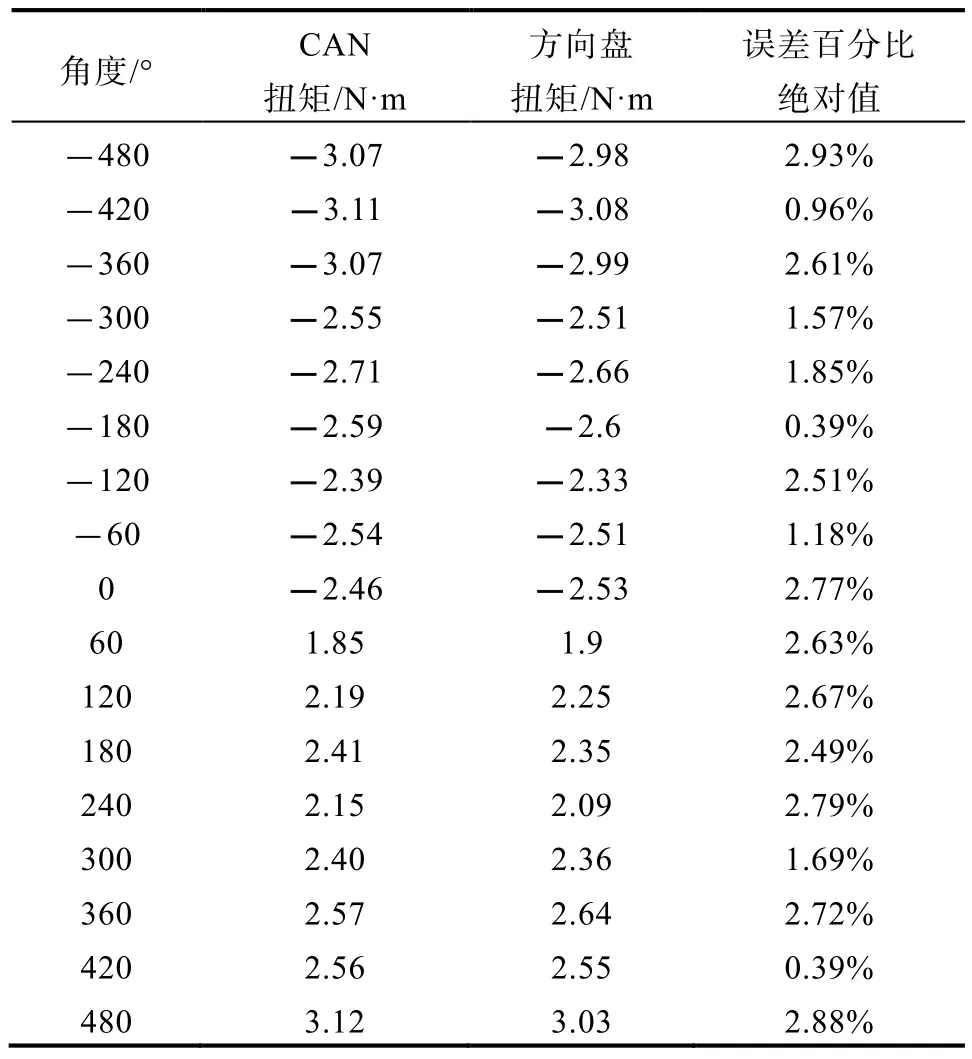
表1 转向角-转向力矩表
通过表 1可以看出,从转向右极限到转向左极限的转向过程中:在转向中间区域位置,转向力较小;随着转向角度的增大,转向力也随之增大,与实际相符。这两种不同测试方法在相同转向角度时,转向力矩的值接近,变化趋势一致,两者的误差均小于3%,差值较小,在可接受范围之内,由此可知,通过CAN报文进行转向力测试的方法,是可行可靠、较为准确的,后续可以采取CAN总线报文的方式来进行转向力的其他工况的试验。
3 动态转向力测试
通过怠速工况下的两种测试方法的对比,验证了CAN报文测试方法的正确性和可靠性,后续将直接通过CAN报文的方法进行转向力测试数据的录制、保存。由于整车在高速行驶过程中,进行大角度的转动过于危险,且应用场景较少,故主要是在小角度转向(5 °~25 °)时,进行整车动态转向力矩测试。
本文中的小转向角度下整车动态转向力测试主要针对10 km/h~120 km/h车速范围来进行。在各车速下,进行至少三个完整周期的小角度转向试验,并在实验开始前进行CAN报文的录制。对CAN报文数据进行分析处理后,得到的不同转向角度时,各车速下对应的转向力矩值如表2所示。

表2 不同速度段各方向盘转角转向力矩值
由表2可以看出,在低车速段(30 km/h内),转向力随着转向角度的变大而平缓增加,且力矩值较小,保证了驾驶舒适性;在中高车速段,转向力矩增长明显变快,保持驾驶信心感。整体来看,整车动态工况下,随着车速的增加、转向角度的增大,转向力矩明显变大,与实际情况相符,满足了整车转向性能要求;转向力矩在各车速下的线性度较好,变化梯度较小,同时力矩波动控制较好,给驾驶员的驾驶反馈良好。
4 总结
通常情况下,采用力矩方向盘对转向手力矩进行测量,这种方法步骤较为繁琐,实验前期的准备工作较多,而本文提出的通过解析CAN总线上EPS节点发送的报文的方法来测量转向力矩则更方便快捷。根据CAN报文和力矩方向盘两种方式的测量结果对比可以看出,通过CAN报文方式来测量转向力的方法是可行可靠的、准确的,这不仅缩减了传统测试方法的步骤,还减少了设备安装误差,提高了测量精度。随着车辆配置的迭代升级,电动助力转向管柱大范围使用的普及,让这种测量方法的适用性也得到了保障。
