一种移动机器人路径规划方法的研究
2022-03-19周明龙程晶晶
周明龙 程晶晶

摘要:该文主要是设计了一种可扩展式移动机器人,提出了基于Levenberg-Marquardt方法优化的 EKF-SLAM算法、基于势场蚁群算法的移动机器人全局路径规划,并探索了一种新的最优路径搜索方法,即有机地将移动机器人局部路径规划融入全局路径规划中,并且通过机器人仿真实验完成室内移动机器人的自主导航,相比传统方法能够提高KEF算法的定位精度以及稳定性,并结合仿真实验验证改进后的有效性,得出了位置预测结果更加准确,从而得到更优的路径规划。
关键词:移动机器人;路径规划;自主导航
中图分类号:F270 文献标识码:A
文章编号:1009-3044(2022)02-0010-03
近年来,科学技术的进步促使机器人在人民生活中应用越来越广泛。作为机器人为人类提供高质量服务的基础,面向机器人的定位正逐渐成为该领域的研究热点。近十几年来,机器人学界涌现出了各种各样的针对SLAM问题的解决方案。其中,基于扩展卡尔曼滤波器(EKF)的EKF-SLAM方法获得了广泛的认可并被普遍应用,这种方法是通过测量含噪声的变量的形式获得运动过程中某一时刻的状态得出估计值,最后根据反馈修正估计值。这样,EKF-SLAM就能在不须了解机器人详细性质的前提下,高效地对运动的过去、当前、甚至将来的状态进行估计,但该方法的稳定性和定位精度仍有不足。
1 移动机器人硬件结构的技术方案
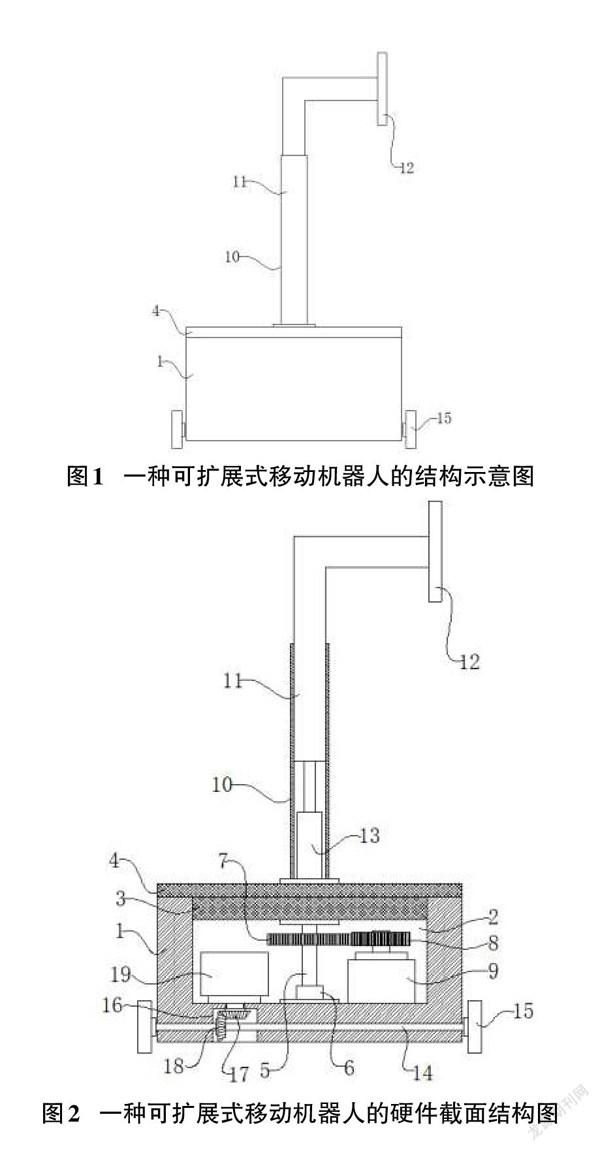
一种可扩展式移动机器人的硬件设计如图1、图2所示,其中,1-移动底座;2-操控凹槽腔;3-转动台;4-转动基板;5-旋转轴;6-轴套;7-直齿轮一;8-直齿轮二;9-旋转电机一;10-主体管;11-L形滑杆;12-工具支板;13-电动推杆;14-轮轴;15-移动轮;16-缺口槽;17-锥齿轮一;18-锥齿轮二;19-旋转电机二。一种可扩展式移动机器人包括移动底座,移动底座上开设有操控凹槽腔,所开设的操控凹槽腔的开口端转动配合安装设有转动台,转动台的底端面中间位置处固定连接旋转轴的顶端,旋转轴的底端通过轴套一体转动配合安装设置在操控凹槽腔内,旋转轴上固定套设安装有直齿轮一,直齿轮一啮合传动连接直齿轮二,直齿轮二固定套设安装在旋转电机一的输出端,转动台的顶端面上设有一体结构的转动基板,转动基板的中间位置处垂直固定安装设有主体管,主体管的内腔底部设置有电动推杆,主体管的内腔顶部滑动配合安装有L形滑杆,电动推杆的伸缩杆端与L形滑杆之间相固定连接,L形滑杆的尾端固接设有工具支板。
使用时,通过移动底座1上所开设的操控凹槽腔2内安装设置的旋转电机一9转动,从而带动直齿轮二8啮合传动直齿轮一7旋转,从而使得旋转轴5带动转动台3以及转动基板4进行转动,转动台3与操控凹槽腔2的开口端之间相转动配合安装设置,使得转动台3旋转稳定,从而便于旋转调节转动基板4所需的应用的加工角度位置,操作便捷且方便;通过电动推杆13便于推送L形滑杆11沿主体管10进行滑移穩定,从而便于上下伸缩滑移L形滑杆11的支撑高度位置,其尾端固接的工具支板12的高度便于相对应调整使用,满足所需加工高度位置,操作应用方便;通过旋转电机二19带动锥齿轮一17旋转,从而啮合传动锥齿轮二18旋转,使得轮轴14带动移动轮15进行旋转移送,使得移动底座1整体移动稳定且便捷。本技术方案结构简单,装配安装方便,通过旋转电机一经直齿轮二、直齿轮一依次传动至旋转轴进行转动,使得转动台以及转动基板旋转稳定,便于旋转调节转动基板所需的应用的加工角度位置,操作便捷且方便;通过主体管内腔底部设置的电动推杆便于带动L形滑杆进行稳定滑移,L形滑杆及尾端固接的工具支板的高度便于相对应调整使用,满足所需加工高度位置,操作应用方便。
2 移动机器人路径规划方法的技术方案[1-2]
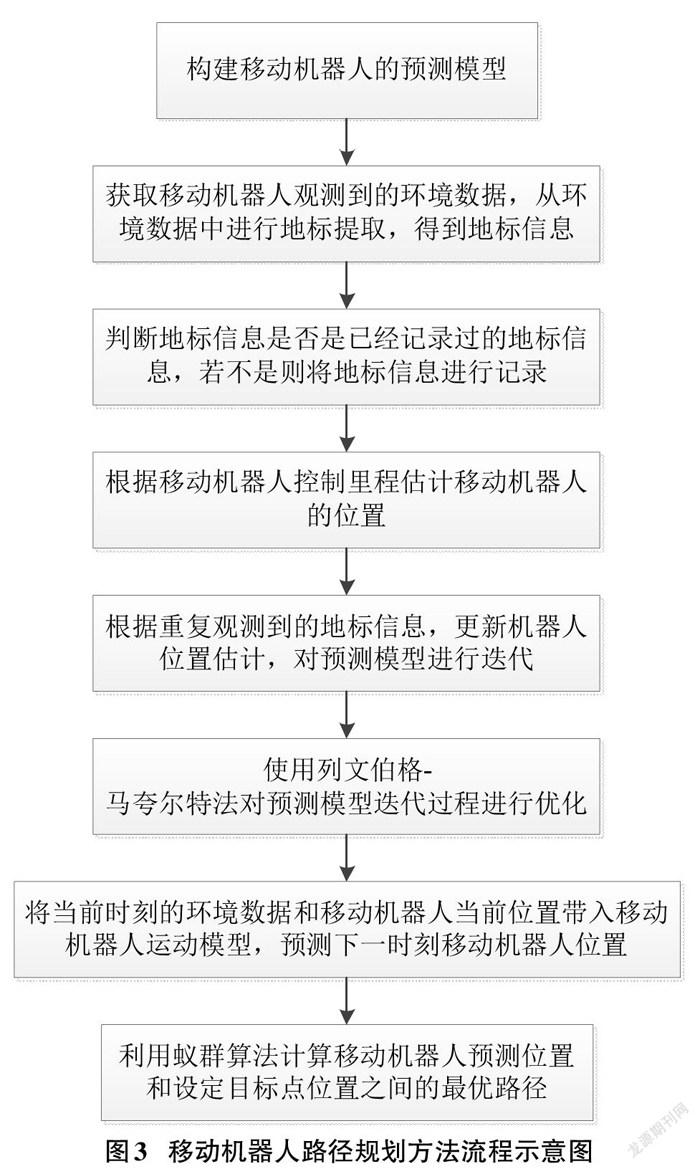
移动机器人路径规划方法可以用来解决稳定性和定位精度的问题。一种移动机器人路径规划方法的技术方案具体步骤如下:
①构建移动机器人的预测模型;
②获取移动机器人观测到的环境数据,从环境数据中进行地标提取,得到地标信息;
③判断地标信息是否是已经记录过的地标信息,若不是则将地标信息进行记录;
④根据移动机器人控制里程估计移动机器人的位置;
⑤根据重复观测到的地标信息更新机器人位置估计,对预测模型进行迭代;
⑥使用列文伯格-马夸尔特法对预测模型迭代过程进行优化;
⑦将当前时刻的环境数据和移动机器人当前位置带入移动机器人运动模型,预测下一时刻移动机器人位置;
⑧利用蚁群算法计算移动机器人预测位置和设定目标点位置之间的最优路径。
获取移动机器人环境数据后,去除环境数据中的高斯噪声,判断地标信息是否是已经记录过的地标信息,预测移动机器人当前位置能够观测到的地标信息;度量预测的地标信息与实际观测的地标信息的马氏距离,与设定阈值进行比较;若马氏距离不超过设定阈值,则将两个地标视为同一地标;协方差矩阵主要是通过移动机器人与地标之间的协方差以及移动机器人位置、地标的协方差组成的;根据移动机器人的控制里程、预测模型的雅克比矩阵对协方差矩阵进行更新,预测移动机器人当前位置;估计出机器人当前位置值和地标信息,从而预测出地表角度以及位置;计算测量模型的雅克比矩阵;计算雅克比矩阵的卡尔曼增益;利用卡尔曼增益计算新的状态向量,得出当前机器人位置和各地标的位置;将新观测到的地标信息加入预测模型中,更新预测模型;为达到降低算法的深度以及复杂度的目的,从而将人工势场局部搜索优化算法融入计算过程中;为了提高隐含全局最优空间的信息素浓度,可以将信息素扩散栅格表和信息素扩散模型融入势场蚁群算法中[3];计算完整路径;通过几何优化策略优化局部路径获得另一条完整路径,并完成此相邻路径的信息素更新;比较各完整路径,得出最优路径。
3 移动机器人路径规划方法实施说明
本方法通过提出基于Levenberg-Marquardt 方法优化的 EKF-SLAM算法、基于势场蚁群算法的移动机器人全局路径规划,探索一种新的最优路径搜索方法,即有机地将移动机器人局部路径规划融入全局路径规划中,并且通过机器人仿真实验完成室内移动机器人的自主导航,相比传统方法能够增加扩展卡尔曼算法的稳定性和定位精度。移动机器人路径规划方法具体实施步骤分为六步,具体如下[3-5]:
第一步:获取移动机器人环境数据后,去除环境数据中的高斯噪声,提高环境数据的可靠性。
第二步:判断地标信息是否是已经记录过的地标信息。预测移动机器人当前位置能够观测到的地标信息;度量预测的地标信息与实际观测的地标信息的马氏距离,与设定阈值进行比较;若所述马氏距离不超过设定阈值,则将两个地标视为同一地标。马氏距离也称为归一化平方新息,是新息向量的加权范数。
第三步:根据移动机器人当前里程估计移动机器人的位置。协方差矩阵主要是通过移动机器人与地标之间的协方差(Covariance)以及移动机器人位置、地标的协方差组成的[1-2];预测移动机器人预测模型的雅克比矩阵;根据移动机器人的控制里程、预测模型的雅克比矩阵对协方差矩阵进行更新,预测移动机器人当前位置。在概率论和统计学中通常是通过协方差衡量两个变量的总体误差。两个变量的协方差提供了这两个变量相关程度的度量。多维随机变量的研究主要是通过协方差矩阵来实现的。
第四步:根据重复观测到的地标信息,更新机器人位置估计,对预测模型进行迭代。根据机器人当前位置的估计值以及记录的地标信息计算地标位置和角度的预测值;计算测量模型的雅克比矩阵;计算雅克比矩阵的卡尔曼增益;利用卡尔曼增益计算新的状态向量,得出当前机器人位置和各地标的位置;将新观测到的地标信息加入预测模型中,更新预测模型。
第五步:利用蚁群算法计算移动机器人预测位置和设定目标点位置之间的最优路径。将人工势场局部搜索优化算法融入计算过程中;为了提高隐含全局最优空间的信息素浓度,可以将信息素扩散栅格表和信息素扩散模型融入势场蚁群算法中;以当前路径点的信息素为扩散源,引入扩散因子;计算完整路径;通过几何优化策略优化局部路径获得另一条完整路径,并完成此相邻路径的信息素更新;
第六步:比较各完整路径,得出最优路径。
4 移动机器人路径规划方法的验证实施路径
4.1 移动机器人路径规划方法的验证实施路线
以自主移动车辆作为移动机器人的模型,建立移动机器人系统模型,通过对移动机器人的同时定位与地图构建、路径规划等方面进行深入的研究工作,提出了基于Levenberg-Marquardt 方法优化的 EKF-SLAM算法、基于勢场蚁群算法的移动机器人全局路径规划、融合移动机器人全局路径规划与局部路径规划的最优路径搜索方法,并且通过机器人仿真实验,完成室内移动机器人的自主导航。
4.2 移动机器人路径规划方法的算法原理[6-7]
为了蚁群算法的深度以及复杂程度,将人工势场局部搜索寻优算法融入其中;为了提高隐含全局最优空间的信息素浓度,将信息素扩散栅格表和信息素扩散模型融入势场蚁群算法中,以当前路径点的信息素为扩散源,引入扩散因子。
仿真结果主要是比较不同方法以及最佳参数匹配和参数不同组合,从最优路径的搜索以及算法时间、迭代深度等方面得出基于势场蚁群算法的优势。蚁群算法中蚂蚁个体的搜索效率可以通过局部路径的优化获取其他完整的路径,及时更新相邻路径的信息素,蚂蚁个体具备对两条完整路径进行搜索的能力,蚁群算法的复杂度和深度得到了有效降低。
5 结束语
研究的移动机器人的路径规划方法主要是通过设计了一种可扩展式移动机器人,提出了基于Levenberg-Marquardt 方法优化的 EKF-SLAM算法、基于势场蚁群算法的移动机器人全局路径规划以及探索了一种新的最优路径搜索方法,即有机地将移动机器人局部路径规划融入全局路径规划中,并且通过机器人仿真实验完成室内移动机器人的自主导航,相比传统方法能够提高KEF算法的定位精度以及稳定性,并结合仿真实验验证改进后的有效性,得出了位置预测结果更加准确,从而得到更优的路径规划。
参考文献:
[1] 巨江.基于激光雷达的室内移动机器人SLAM研究[D].西安:西安电子科技大学,2019.
[2] 陈强龙.室内移动机器人路径规划方法研究[D].北京:北京工业大学,2019.
[3] 周明龙,程晶晶等.一种移动机器人路径规划方法[P].中国专利:CN201911312815.2.2020-05-08.
[4] 刘建华.基于智能优化算法的机器人路径规划与目标跟踪方法研究[D].上海:东华大学,2017.
[5] 彭湘,向凤红,毛剑琳.一种未知环境下的移动机器人路径规划方法[J].小型微型计算机系统,2021,42(5):961-966.
[6] 唐嘉宁,潘蓉,周思达,等.融合模拟电势场的改进人工势场法研究[J].电光与控制,2020,27(12):69-73.
[7] 于振中,李强,樊启高.智能仿生算法在移动机器人路径规划优化中的应用综述[J].计算机应用研究,2019,36(11):3210-3219.
【通联编辑:代影】
