基于RMPPT/PID双模控制的光伏发电MPPT研究
2022-03-16闫根弟赵晋斌张广勇戴丽莉
闫根弟,赵晋斌,张广勇,戴丽莉
(1.太原工业学院,太原 030008; 2. 上海电力大学,上海 200090; 3. 国网山西省电力公司检修分公司,太原 030000)
0 引 言
近几年,能源行业逐渐发生变化,发展势头良好。国际可再生能源署发布《全球能源转型:2050年路线图》(2019版)指出,按照基于可再生能源技术的低碳技术路径,到2050年,可再生发电总量将增加7倍,从目前的7 000 TW·h增加到47 000 TW·h。在一次能源供应中的占比将上升到66%,而在终端能源消费中,电力占比将增长至50%,其中约有86%来源于可再生能源发电,60%来自可变可再生能源(太阳能和风能),到2050年,太阳能发电装机容量约为8 500 GW[1]。太阳能光伏并网发电系统主要组成部分是太阳能电池组,而太阳能电池输出功率随着光照强度以及环境温度的不同而产生非线性变化。为了使太阳能发电系统工作于电池输出功率最大点,系统应实时调节电池的工作点,使其一直工作在最大功率点附近。因此太阳能的最大功率跟踪算法( MPPT) 的研究成为当下的研究热点[2-3]。
为了保障光伏并网发电系统能够工作于太阳能电池组的最大输出功率点处(MPP),常采用MPPT技术,如图1所示。
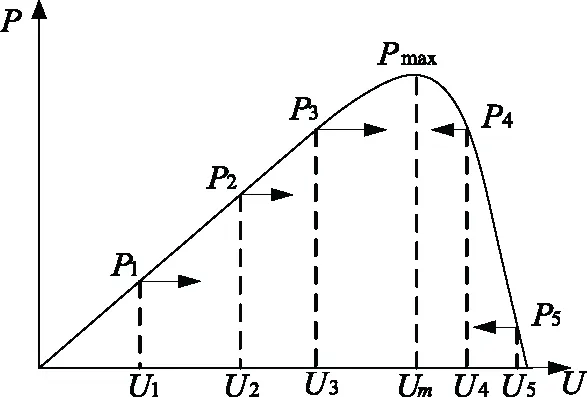
图1 太阳能电池MPPT控制原理图
其工作原理主要是通过对太阳能电池输出的功率进行实时检测,假设初始电压在U3处,而得到当前的功率P3,再采集Um处功率,得到当前的功率Pmax,检测比较,再采集U4处的功率P4,再比较,可以知道系统最大功率点在Um附近,然后逐渐逼近最终使系统工作于MPP处。
目前为止,太阳能光伏发电系统中最大功率追踪的相关研究较为深入,但是存在的问题依旧不少,如文献[4]将电导增量法MPPT控制方法与其他MPPT控制方法进行比较,提出了改进的变步长电导增量法,然而单一的电导增量法无法同时兼顾系统的动态性和稳定性;文献[5]研究设计了模糊控制法与电导增量法结合的MPPT算法,有效地提高了太阳能光伏电池阵列的跟踪速率,虽然在理论研究上值得肯定,但在实际应用中(外界环境不稳定时)对整个光伏发电系统的精度有待提高。本文在前人研究的基础上,针对传统的最大功率跟踪对外界环境变化存在较大不稳定性这一不足,在扰动观察法基础上采用RMPPT/PID双模控制策略对光伏发电系统进行控制设计,使系统在外界环境发生变化,特别是光强变化时能够实时、准确、快速地工作在最大功率点处。
1 光伏电池阵列特性
太阳能电池的工作原理是利用光生伏特效应,根据电子学相关理论,可得到光伏电池的等效电路如图2所示[6-7]。

图2 太阳能电池等效电路
设定图中电流、电压正方向,当流进负载R0的电流为I0,其端电压为V0时,可以得出光伏电池的V-I方程如式(1)所示:
(1)
其表达式中参数及表示意义如表1所示。根据式(1)建立其工程用数学模型,可以知道光照强度和外在温度是影响太阳能电池功率输出的最重要参数,当太阳光照强度和环境温度变化时其光伏特性曲线如图3所示[8-9]。

表1 方程式中参数含义
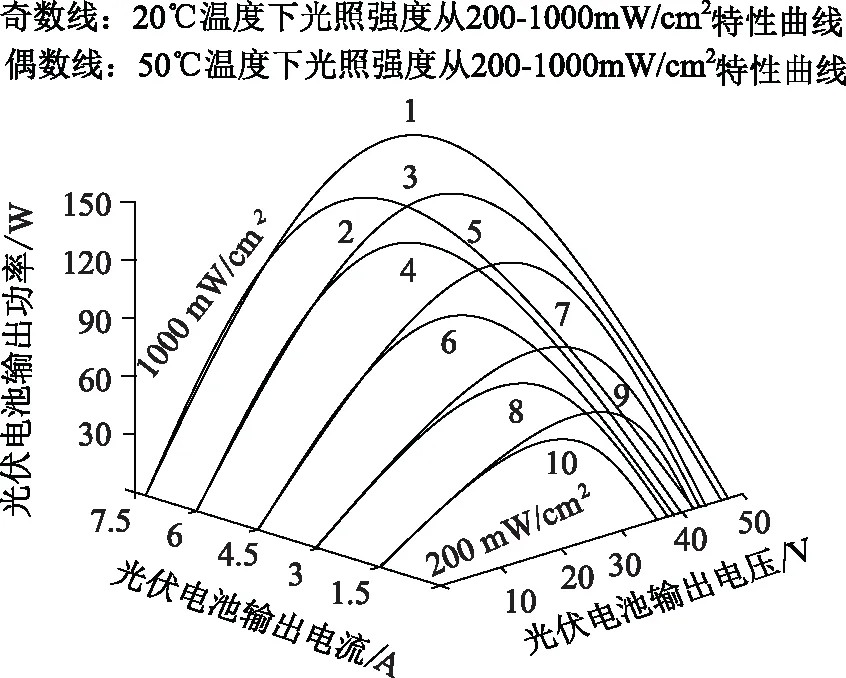
图3 光伏电池特性曲线
为验证太阳能电池输出特性曲线性质,假设环境温度不变时,在实验室搭建了一组700 W的多晶硅光伏阵列,并测量了其I-V和P-V特性,测试参数如表2所示,在此测试数据基础上得出光伏阵列伏安特性曲线和光伏阵列输出电压与功率曲线分别如图4和图5所示。

表2 不同光照强度下700 W光伏阵列伏安特性测量数据
从图4中可以发现,随着光照增强,其短路电流随着增大;从图5中可以发现,随着光照增强,其最大输出功率随着增大。

图4 光伏阵列伏安特性测量曲线图

图5 光伏阵列输出电压与功率测量曲线图
2 基于RMPPT/PID双模控制原理及实现
2.1 RMPPT控制原理及实现
目前用的较多的MPPT控制算法主要有固定电压法(CVT)、扰动观察法(P&O)[10]、电导增量法(IC)[11-12],或是其改进算法[13]等。对于那些时变的系统,用传统方法不能准确跟踪到MPP,这里采用RMPPT(Real-time Maximal Power Point Tracking)控制,即光伏系统在光照强度及环境温度时刻变化情况下,能够实时检测其变化,使光伏电池输出在最大功率点处。其传统的电导增量法虽然控制较方便[14],但是牵涉有微分运算,如果要实现起来较复杂且易受采样精度的影响,在其基础上提出一种新的RMPPT实现方法。就是把dP/dV用功率变化量dP来取代,其控制原理如图6所示。
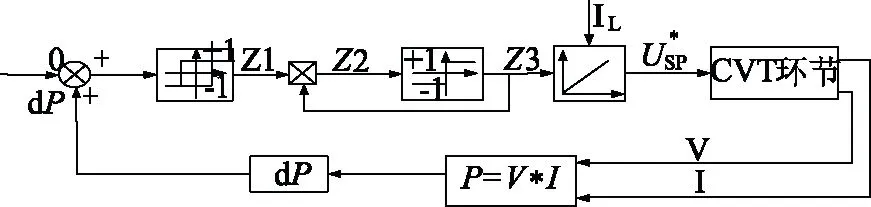
图6 dP控制原理图

2.2 控制算法仿真
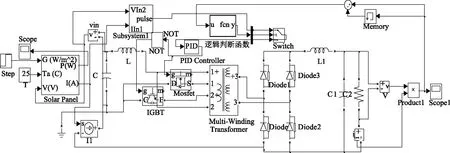
图7 TMPPT/PID双模控制仿真模型
3 仿真结果分析
系统仿真参数设置为:仿真时间设置为3 s,变步长的ode23tb,零阶保持器采样周期为10e-4 s,环境温度T=25 ℃,XZSTIl80-24/B型号光伏电池组件参数:Pm=180 W;Vm=36 V,Im=5.0 A,Isc=5.30 A;Voc=44.8 V,系统逻辑判断函数根据|P-Pmax|≤2.5实现TMPPT算法和PID之间切换。经多次仿真实验可设置PID参数为Kp=104、Ki=2.5×10-3、Kd=2.5×10-4,系统在以上参数条件下可以达到较好的控制效果。图8为三种不同MPPT控制方法的输出功率仿真结果图。
从图8(a)所示的传统P&O控制的系统仿真结果可知,系统在0.2 s左右跟踪到最大功率点,功率点处附近有很明显的波动,当在t=1 s时,光强由800 W/m2变为1 000 W/m2时,系统稳定于180 W。图8(b)和8(c)所示的仿真结果分别表示采用RMPPT控制和RMPPT/PID双模控制的功率输出曲线,通过对比发现,系统能在小于0.1 s时间内工作于最大功率点,当在t=1 s时,光强由800 W/m2变为1 000 W/m2时,系统稳定于180 W,基于RMPPT控制的曲线到达最大功率点后,发生小幅零点振荡,而基于RMPPT/PID双模控制的曲线平稳。由此可知,本文提出的一种RMPPT/PID双模控制方法能够在外界环境发生变化时有效缩短追踪时间,同时减少输出功率附近的功率振荡,最终使系统稳定运行于最大功率点处。

图8 MPPT控制仿真结果
4 结束语
针对太阳能电池的非线性特性,以及传统MPPT控制方法的不足,提出了一种RMPPT/PID双模控制方法。该方法能够实时响应外界环境变化,同传统的方法相比,可以有效地缩短追踪时间,系统加入的PID自适应控制大大减少了输出功率附近的功率振荡。系统仿真表明,当外界环境发生变化时,该控制方法能够快速、准确地跟踪MPP和基本消除MPP的功率振荡现象,并使整个系统保持稳定运行。