上海设施内生菜全程机械化生产方式的研究
2022-03-13范良俊
范良俊
(上海市农业机械研究所,上海市 201100)
0 引言
近年来,在上海市政府和各级相关企事业单位的共同努力下,以鸡毛菜、米苋为代表的叶菜类蔬菜已经基本实现了“耕种收”的机械化,这也为其他蔬菜机械化生产提供了坚实的基础。在十四五开局之年,上海市划定了3.33万hm2蔬菜生产保护区,其中包括了6 666.67 hm2生菜种植面积,因此大力推广生菜绿色种植技术,提高生菜全程机械化生产能力,是保证市民“菜篮子”工程的主要任务之一。
上海种植的生菜品种根据其物理性状大致可分为皱叶生菜、结球生菜、直立生菜、奶油生菜等,其中以结球生菜和皱叶生菜最为常见,种植面积也相对较大。结球生菜俗称西生菜,是美国最流行的生菜类型,常见的结球生菜有凯撒、大湖118等,其特点为根系发达,叶片大,叶柄短,单球可重达400~750 g,是生食生菜的主要品种之一;而皱叶生菜最主要的特征就是不结球,茎极为短缩,节间不明显,叶柄较长,叶面皱缩,单颗重约300~450 g。上海地区种植的生菜品种有意大利生菜、玻璃生菜和结球生菜,由于生菜较耐寒、不耐热的特点,上海一般从8月下旬~来年5月份都可以在设施内种植。
为了提高生菜生产效率,需要完善相关农机设备的选型和研制,从而不断提升生菜生产的机械化水平。生菜的生产主要包括整地、作畦、育苗、移栽和收获等环节,每个环节都要需要采用相关的专业设备来实现作业。
1 旋耕
旋耕作业可以使田土充分细碎、平整种床、恢复土壤耕层结构,通过作业将土肥掺和均匀,提高土壤肥力,同时消灭一部分杂草、减少虫害,也为下一步农业机械化操作提供保障。旋耕机作业幅宽从1.2~2.2 m不等,所需拖拉机动力也有不同。
设施种植生菜一般为8 m跨度的连栋温室和8 m单棚为主,设施种植一般采用1.2 m幅宽的旋耕机为最佳,旋耕机的作业深度需达到10 cm以上。采用2 m左右的大型旋耕机虽然可以旋耕作业的时间,但是所需拖拉机动力较大,且机具在设施内掉头困难,因此不建议采用。
2 作畦
上海现有设施温室所设计的跨度均为8 m,根据这一现状对机械化作畦做如下分析和试验:为了提高土壤的利用率,也为了满足后续移栽、收获机械化操作的可行性,对不同畦面进行理论分析,现常用设施内作业的作畦机多为1 m、1.1 m和1.2 m幅宽规格(见图1,图2,图3),通过比较分析,三种不同幅宽在8米跨度作5条畦,上述三种规格每667 m2土地有效种植面积分别为62.5%、68.8%和75%。但考虑到拖拉机轮胎宽度一般从16~20 cm不等,所以相邻两个畦底间距一般大于20 cm。综上所述,1.1 m的幅宽的作畦机更加适合设施内的作业,也更具有可操作性。

图1 作畦分布图(1 m)

图2 作畦分布图(1.1 m)
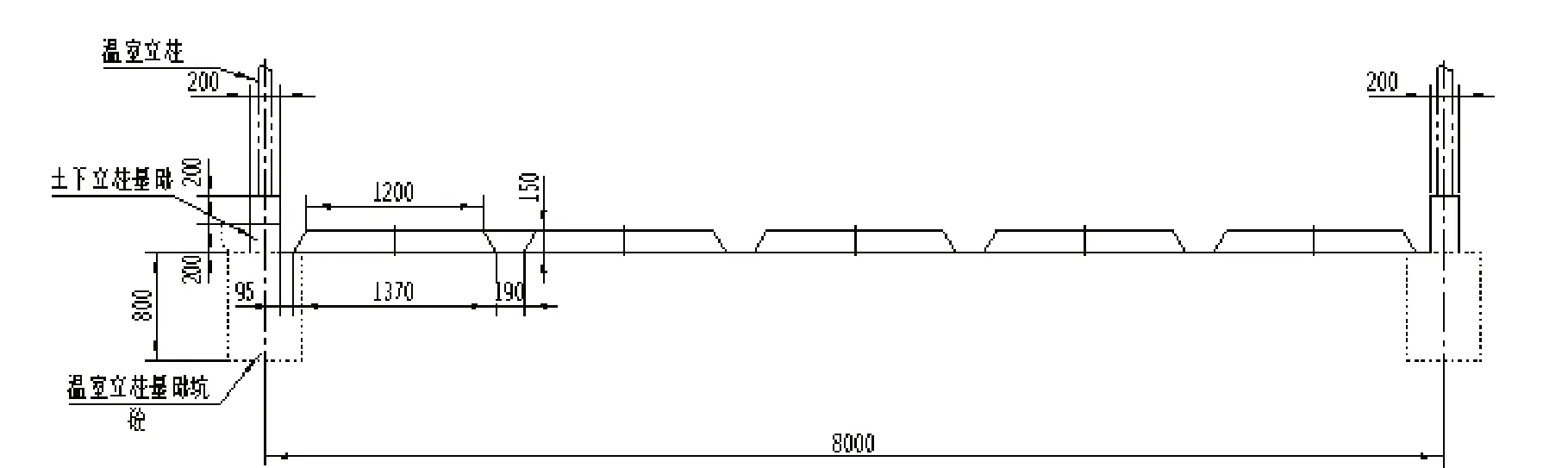
图3 作畦分布图(1.2 m)
通过选取了两种不同形式的作畦机进行作业对比,对畦面紧实度、平整度、效率等数据进行比较分析。常用的作畦机有两种成型模式,一种为成型板拖拽成型,另一种为液压滚筒成型。具体型号参数如表1所示:

表1 两种作畦机各项参数
通过作畦作业后对畦面的比较发现,由于成型板拖拽成型的作畦机属于被动式成型,对于畦面没有施加压力,畦面和两侧面相对松散,表面有一定的鱼鳞状,而带液压作畦轮做的作畦机属于主动式,通过液压滚筒的挤压而使畦面成型,所以畦面相对平整且不易塌陷,更有利于机械化的移栽和采收环节。两种畦面效果如图4所示,图中左侧畦为成型板拖拽成型的畦面,右侧为液压滚筒成型的畦面。

图4 两种作畦机作畦效果
此外,通过温湿度仪器和坚实度仪对两种畦面的坚实度进行了测试,测试数据见图5,图6。

图5 两种作畦机前后含水量对比
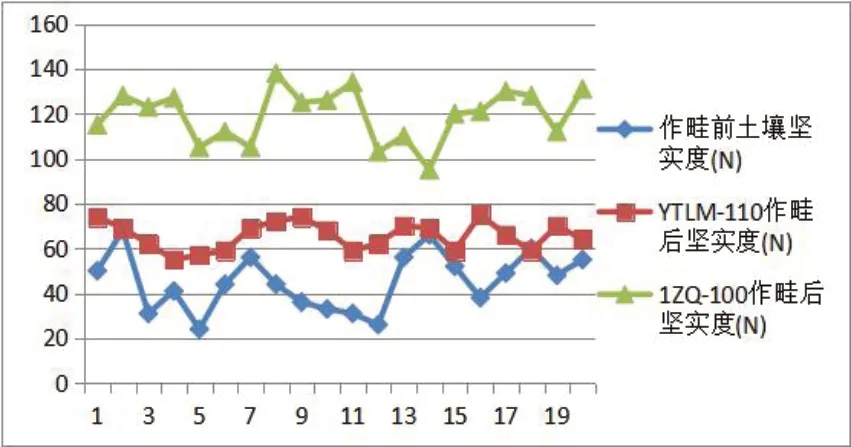
图6 两种作畦机前后坚实度对比
由于生菜对水分要求非常严格,所以栽培上必须经常保持土壤湿润,通过对两种作畦机在作畦前后含水量和坚实度的对比发现,在相同旋耕深度情况下,带液压镇压的作畦机由于对畦面有镇压功能,作业时需要控制一定速度来保持一定坚实度,行走速度相对慢,但因此其碎土效果反而会更好,保水效果也更高。更加适意生菜的生长,其次坚实度相对较高也会使得畦面平整度有所提升,这样为之后的机械化收获也带来一定的优势。
3 育苗及移栽
生菜的种子非常小,而且发芽时间一般在5~10天,同时生菜的种子价格昂贵,采用撒播方式播种用种量较大,尤其是大面积种植时,难以保证田间幼苗生长一致性,也无法培育壮苗,对生菜后期生长一致性不好控制。所以育苗移栽种植更加适合,播种可采用蔬菜精量播种流水线,播种效率可以高达400~500盘/h,播种精度最高可以达到99%。播种后的生菜需要在催芽室放置一至两天,再移到设施内进行育苗,根据天气情况一般15~30天可以进行移栽种植。
经过调研,以加州大速生为例,可在1.1 m畦面上种植4~6行,通过筛选选择两种适合1.1米畦面种植的移栽机进行移栽对比试验,具体参数见表2。

表2 两种移栽机参数
井关(2ZY-2A)两行移栽机由一人操作,在1.1 m畦面作业需要掉头一次,而禾田(A5-1200)八行高密度移栽机可以通过改变移栽行距实现四行移栽。在相同前提情况下作了作业对比,具体数据见表3。

表3 两种移栽机作业参数比较
由上述数据导致机械化移栽不合格的原因一般是由于钵苗在下苗的过程不畅,出现堵苗的情况,所以为例避免这一情况,在育苗时控制苗的大小尤为重要;其次现有的移栽机大部分采用鸭嘴式的投苗装置,再通过覆土滚轮覆土,投苗装置的频率、开合大小等参数和覆土装置的合理性直接决定了是否存在倒苗的情况;关于移栽效率,在1.1 m畦面移栽,由于A5-1200移栽机需要两人作业,实际操作时无法保证两个人速度同步,所以单程移栽效率方面,2ZY-2A的效率更高,但是由于所移栽的行数限制,两行比四行需要多走一次,总体效率较低。
4 收获
生菜相比其他绿叶菜而言,生根较浅、单球重、节间不明显,割刀需要紧贴土壤进行切割作业,因此在割头的形式上选择,摆刀更适合生菜的采收作业。相比较剪切式和带刀式,摆刀可以入土或实现贴地收割,将生菜完整收获。摆刀的运动轨迹一般由偏心轴承和连杆机构实现,摆动刀频率应控制在合理范围内,由于生菜单颗重量较重,在割台的倾斜角不能过大,输送带要有一定阻力,防止生菜下落。根据上述特点和要求,选择了两款典型收割机,在上海嘉定百蒂凯生菜专业生产的合作社进行收获试验。详细参数见表4。

表4 两种作收割机各项参数
两款绿叶菜收割机无论从结构、行走方式、控制方式等方面都有很大不同,因此我们对生菜采收设备的每个环节做了比较试验,结论如下。
4.1 行走方式
4UM-120A叶菜收获机为垄上行走的手扶式收割机,4GCZ-100叶菜收获机为垄下行走的乘坐式收割机,前者的转向通过人工转向和纠偏,行走部件除了后轮差速器驱动,前轮为导向轮,在工作时容易发生偏转,对人为纠偏的过程产生一定影响,但整体结构相对简单;后者为履带自走式,通过电动手柄控制电比例泵来实现转向,操控相对简单,但设备体积较大。
4.2 割刀参数
两台收割机均为摆动式锯齿刀,在设计时摆动幅度和频率尤为重要,频率过高使整个机身都产生晃动,降低设备使用寿命,频率太低无法有效切割菜根,作业效果大打折扣,其次,过大的摆动幅度也会导致设备机构晃动过大,使设备整体的稳定性降低,控制在5 cm以内即可。经过多次收割试验,摆动频率达到500次/min,就可实现生菜的切割作业。相比两款收获机,4UM-120A手扶式收割机摆动频率可调可以因地制宜的根据不同菜品调整割刀的摆动频率,实现无级调速。
4.3 前进速度
由于生菜株距较大,无法靠后排菜的挤压实现收获,且割刀不同的收获高度也应该采用不同的前进速度。以4UM-120A手扶式叶菜收获机为例,由于没有仿形系统,一般采用土下收割的方式,这样收割高度基本恒定,且土下收割收获的菜品相对完整;而4GCZ-100自走式叶菜收获机带后置式仿形系统,不建议土下收割,一旦土下切割就会将基准破坏,仿形作用也随之失效,只可贴地切割。由于生菜单颗重,根茎较粗,速度太慢会推到生菜导致菜品不完整,所以前进速度要相对快,经过测试,速度控制在30 mm/s以上收获效果较理想。但速度不宜过快,过快后设备的操作性难度上升,作业难度加大。
4.4 割台参数
割台输送带的输送速度和收获角度也尤为重要,且与前进速度有一定的关系,割台输送带的线速度基本与前进速度一致,且割台与地面的角度小于30°,根据不同生菜品种角度应该适当降低,生菜单颗重量越大,高度越小。
4.5 收获效果
综合对比两款收割机的作业效果(表5,图7,图8),得出如下结论。

图7 自走式绿叶菜收获机

图8 手扶式绿叶菜收获机
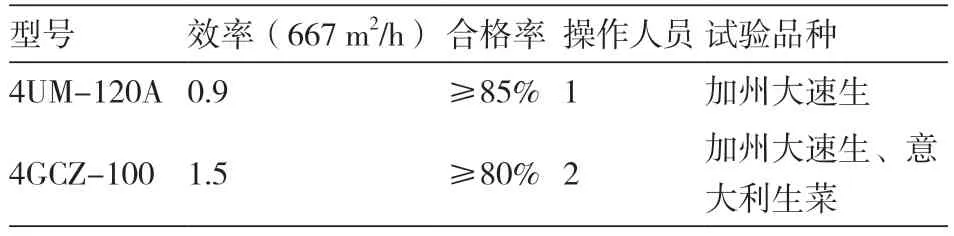
表5 两种作收割机作业参数
1)摆刀的割刀形式最适宜生菜的收割,且摆动频率不低于500次每分;
2)割台角度不易过大,否则会导致生菜运输时下落影响收获效果;
3)相比手扶式,自走式地盘的操控性更高;
4)土下收割方式不适宜带后置式仿形系统,会破坏基准影响收获效果;
5)土上或贴地收割方式可以带仿形系统,来提高收获效果;
6)无论是否带有仿形系统,为保证采收质量,一定要有相对平整的畦面。
5 制约因素
通过本次调研及各项测试,基本总结了适用于生菜机械化生产的机械设备。但由于各个生菜生产的合作社并没有统一生产标准,所以要想实现生菜机械化生产还有一些制约因素。
5.1 传统设施制约
上海现有的设施以传统的8 m单棚为主,还有不少6 m单棚,棚门高不足2 m,两侧斜度较大,机械设备操作空间小、难度大。
5.2 土地利用率低
传统单棚长度一般不超过50 m,由于机械操作需要一定的调头空间,所以土地利用率相对传统人工生产还有一定差距。
5.3 机械设备自身存在缺陷
带整压的作畦机虽然作畦平整度高,但是要求作畦速度慢;半自动移栽机虽然能够改变人工弯腰工作的状态,但是效率较低,省力不省功;收获机械相对于人工收获的合格率还是存在一定差距。
5.4 对机械化生产需求不平衡
由于上海各个地区劳动密度不同,有些地区劳动人员相对充足,这就导致很多合作社还是采用最传统的人工为主的生产模式。但有些地区的合作社已经很难招到合适的大量的人员,对于机械化作业相当迫切。
5.5 农机人才培养滞后
传统生菜生产人员对于农机的操作还停留在操作拖拉机的阶段,且年龄较大,对于新型机械化生产设备消化能力较慢;而青年农机机手人数较少,整个人才梯队培养滞后。
6 生菜机械化生产建议
6.1 加快设施宜机化改造
对于设施单棚改造刻不容缓,过沟板的加宽,端门的扩大,甚至全开式端门都利于机械化的操作,且一定程度上增加了土地的利用率。
6.2 推动农机农艺融合
有些生菜品种单颗重、生根较浅、节间不明显,这些都不利于机械化的作业,所以可以从农艺上选育一些产量高、抗病强且适合于机收的品种。
6.3 加强机械化整体生产模式推广
生菜生产过程中,部分环节已经实现了机械化作业,但是要实现整体机械化生产模式,还需要将每个环节相互配套,特别是为了采收环节的机械作业,前期的整地、作畦等工序就应该选择相应配套的设备,来保证采收时畦面的平整度和坚实度等问题。
6.4 提高机械化设备适应性
针对不同生菜的物理特性,在机械设备的设计上应该多考虑不同品种的通用性和适用性,实现一机多用,满足合作社不同品种生菜机械化生产的需求。
6.5 提升机械化设备自动化水平
在设备设计和选用过程中,应不断提升设备自动化水平,特别是生菜机械化移栽、收获的环节中,解决省力不省功的情况,提高作业合格率的问题,努力提升设备可靠性和自动化水平,也为将来智能化转型做好充足准备。
7 结语
上海作为一个2 400万常住人口的超大型城市,保证蔬菜自供能力是基本前提,而机械化作业的生产方式是最好的方法之一。上海的生菜的机械化生产还在起步阶段,存在种植方式差异化、设施和机械配套难度大和各个环节设备相对较少等情况,还需要不断的试验优化,加大推广力度,为实现生菜机械化生产做足准备。
