无人机航测视频交通流量提取
2022-02-28安哲刘鸿潮
安哲 刘鸿潮



摘要 为高效获取城市道路交叉口交通流量、优化检测鲁棒性、提升统计精度。使用航测法发挥无人机对地信息采集优势,使用深层网络模型YOLOv3训练面向空中视觉角度的车辆识别模型,使用贝叶斯滤波与非极大值抑制算法对不同时间序列车辆对象做同一化匹配。实验中车辆检测平均损失2.79%,各流向车辆平均统计准确率97.88%,检测器在停止线及直行待行区均能完成车辆目标的连续匹配与交通流量的实时统计。
关键词 智能交通系统;检测与监测技术;城市道路交叉口;YOLOv3
中图分类号 U491.112 文献标识码 A 文章编号 2096-8949(2022)02-0015-03
0 引言
交通量调查是交通量特征解析的重要依据,同时也是交通流量建模、交通信号控制策略制定的重要参考数据[1]。由于航测法具有观察角度优势,可同时观察到所有进口道车流情况,利用航测数据对交通管理关切的交通特征要素进行解析意义深远[2],既有研究中,针对无人机视角下多车道流量实时统计方法研究较少。文章使用深度学习网络模型训练用以检测航测视频中车辆对象,针对道路交叉口航测视频车辆对象多、车辆目标动向复杂、车辆目标小、车辆特征同质化严重的问题[3],对车辆对象匹配模型[4]及车流量统计精度优化方法展开研究。
1 车流量提取与算法实现
1.1 车辆目标识别
2016年前后由于图形处理器算力的提升使得基于深度学习理论的目标识别方法飞速发展。比较具有代表性的方法有使用单阶段的SSD(Single Shot MultiBox Detector)、YOLO[5](You Only Look Once),该类算法检测速度较快检测精度稍低[6];基于前启发后回归两阶段的R-CNN(Region-Convolutional Neural Networks),此类算法检测精度较高但检测度较慢。具体到交通影像数据特征提取任务,往往需要将实时性即检测速度作为优先考虑的条件,YOLOv3是Joseph Redmon对YOLO算法的第三次改进[7],YOLOv3算法在保证较高的检测速度的同时,达到更高的检测精度。
1.2 车辆目标跟踪
利用贝叶斯估计,迭代对车辆对象历史位置给出先验,定义同一对象判定规则。
约定当前时刻为t,建立预测模型如下:
(1)
式中:为依据t-1时刻目标最优估计及目标控制期望值作出的t时刻对象先验坐标估计。是对t-1时刻目标坐标的估计,其中表示t-1时刻目标识别模型(YOLOv3)识别结果。表示对控制信息的估计。
(2)
车辆预测任务中控制信息的物理意义为t-1时刻对象车辆的运动速度期望值。是一个有大小有方向的矢量,控制信息的估计由满足高斯分布的A、B卷积推导,x为坐标期望,为坐标的方差,易知控制信息同样满足高斯分布。
(3)
(4)
式中:b1、b2为对对象车辆位置范围估计的期望值,对象的范围由对象坐标和对象高宽确定,、是依据t-1时刻对象车辆高度、宽度作出的对象大小估计。
利用历史检测信息对当前时刻车辆的先验位置作出估计,定义对象同一化判定规则,实现先验位置同目标检测结果的同一化匹配。
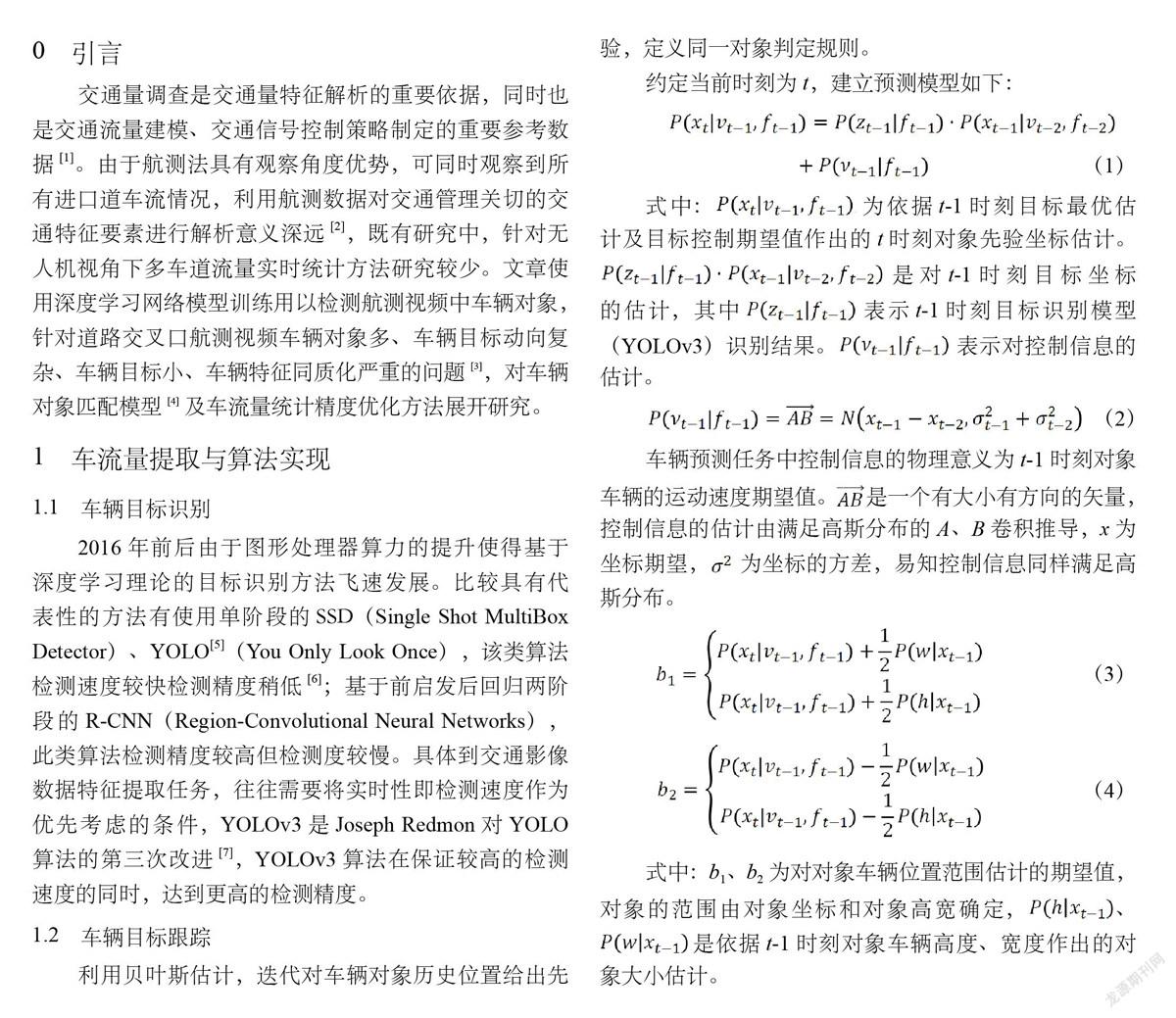
图1中展示第821帧车辆检测结果,和对象车在t时刻即第821帧的最优预测值,Bbox1为对象车辆在t时刻的检测值,Bbox2为同一时刻由西向东直行的另一车辆对象,同一化匹配模型主要完成同一车辆对象预测值和检测值的同一化匹配,对t时刻检测结果中的车辆目标:Bbox1、Bbox2与t-1时刻(第820帧)为同一对象给出判断。
2 实验结果与讨论
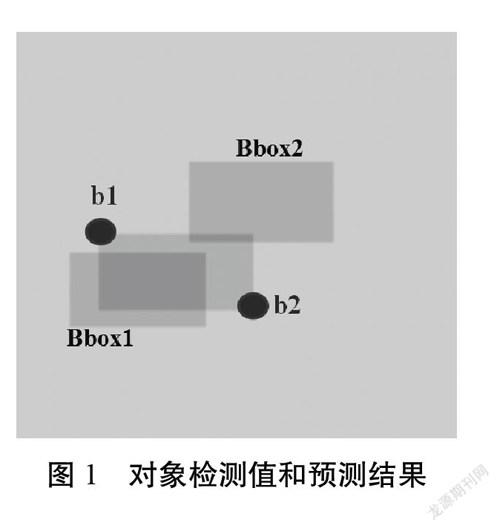
选取友谊路与新华道交叉口早高峰时段航测视频进行实验,模型训练环境为Ubuntu 19.10.1,GCC 9.2.1, NVIDIA 440.100,CUDA V10.2.89,cuDNN 7.6.5,OpenCV 3.2.0,硬件环境NVIDIA GTX980M,显存8 Gb两张。设定訓练样本/批次为16,再分率为4,最大批次设定为50 020。学习率选0.001,训练步数小于30 000次使用初始学习率,小于40 000次时使用60%初始学习率,小于45 000次时使用6%初始学习率,大于45 000到训练结束使用0.6%初始学习率。训练过程中损失曲线如图2所示。
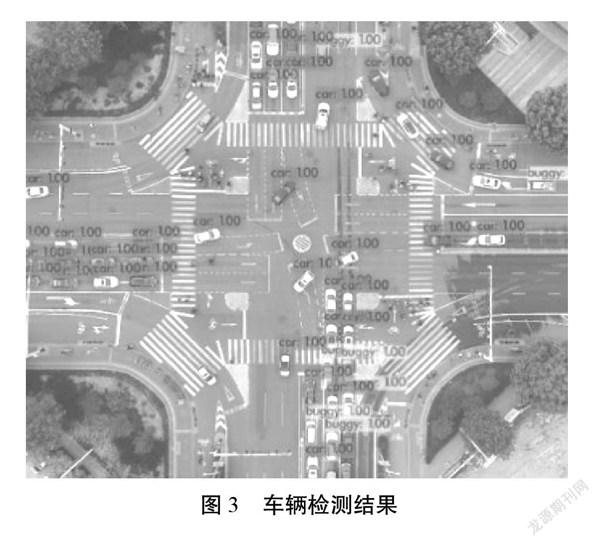
损失函数在震荡多次后收敛于0.045 6,第47 000批时平均损失为0.027 907,损失最少,遂选取模型训练到第47 000次时保存权重进行车辆识别。识别结果见图3,车辆被准确识别,对背景变化有良好的鲁棒性。
车辆对象匹配模型主要存在两类问题:
(1)ID变换(ID switch,IDs)。
(2)ID误匹配(Error Match,EM)。
为检测对象匹配模型效能定义下述评价指标:
不良匹配(Bad Match,BM):IDs+EM,不论是IDs还是EM都会导致最终交通量统计错误,BM用于衡量跟踪模型整体可靠度;
ID变换率(IDs-rate):IDs/BM,用于反应IDs在不良匹配中的占比;
误匹配率(EM-rate):EM/BM,用于反应EM在不良匹配中的占比。
对ID冻结阈值分别取1、3、5、7、9时各评价指标表现如表1。
ID冻结阈值取1时容错范围为0,第一列为没有容错机制下的模型表现,作为对照样本分析。观察发现在3~9范围内不论ID冻结阈值取多大,模型表现均好于直接匹配(对照组)。综合各评价指标表现该实验中选定ID冻结阈值为5,进行后序实验。
如图4:ID值为25的对象车辆正由东向北左转弯,在连续漏检4帧后被重新匹配,实验表明算法留有设计冗余,可一定程度上提升车辆统计准确率。
表2为实验中车辆统计实际交通量,统计准确率及同文献[8]中经典目标检测方法对比情况,布设在停止线的检测器平均统计准确率98.35%,其中右转车道准确率较低为93.1%,布设在交叉口内部待行区域的检测器中通过直行待行检测器的统计准确率为98.8%,相较于文献[8]提出的基于经典目标识别算法的航测视频车辆统计方法,该方法在平均统计精度上提升2.76%。
3 结论
(1)该文提出的车辆统计方法,使用基于深度学习网络的车辆识别算法,实验表明基于YOLOv3训练的车辆识别模型面对道路背景突变问题较经典目标识别算法有更好的鲁棒性。
(2)利用航测法对地观测优势,实现城市交叉口车流量的实时统计,一定程度上提升了目标识别过程中的异常保护能力。
参考文献
[1]陈玉峰,买买提明·艾尼,依再提古丽·阿克甫,等.交叉口交通流的数学建模与数值模拟[J].机械设计与制造,2012(10):256-258.
[2]Papaioannou Panagiotis,Papadopoulos Efthymis,Nikolaidou Anastasia,Politis Ioannis,Basbas Socrates,Kountouri Eleni. Dilemma Zone: Modeling Drivers’ Decision at Signalized Intersections against Aggressiveness and Other Factors Using UAV Technology[J]. Safety,2021(1):11.
[3]康金忠,王桂周,何国金,等.遥感视频卫星运动车辆目标快速检测[J].遥感学报,2020(9):1099-1107.
[4].戚永刚.基于卡尔曼滤波的城市路口车辆检测及分类[J].电视技术,2013(19):241-245.
[5]J.Redmon.Darknet.Open source neural networks in c[EB/OL].2013–2016[20200924].
[6]Redmon J,Divvala S,Girshick R,et al.You only look once:Unified,real-time object detection[C].Proceedings of the IEEE conference on computer vision and pattern recognition.2016:779-788.
[7]Redmon J,Farhadi A.Yolov3:An incremental improvement[J].arXiv preprint arXiv:1804.02767,2018.
[8]張敬,张林,王长伟.基于航拍视频的交叉口车流量统计方法研究[J].计算机仿真,2020(12):117-121.