车道居中保持性能评价方法研究
2022-02-28端帅王霁宇石蕊俞彦辉崔鹏
端帅 王霁宇 石蕊 俞彦辉 崔鹏



摘要 针对智能驾驶车辆居中保持智能性评价问题,提出一种量化测评居中保持性能技术方法。在车辆开启居中保持功能模式,采用高精度数采设备对车辆在不同曲率路段的行驶状态进行采集,数据分析计算得到车辆在车道居中保持行驶时的中心偏置距离。依据车道中心为基准划分智能区、次智能区、临界区和非智能区四个区域,选用区域持续时间作为评价指标,采用非智能度模型计算不同曲率路段和不同行驶区域的非智能度。结果表明,非智能度计算模型验证了车道居中保持性能,提出了车辆居中保持行驶能力量化指标,为验证和评价车道居中保持能力提供了参考方法。
关键词 车道居中保持;非智能度模型;区域持续时间;量化评价
中图分类号 U463.6;U467 文献标识码 A 文章编号 2096-8949(2022)02-0080-04
0 前言
在智能驾驶技术的研究和开发中需要进行大量的测试、评价和验证,尤其在突出智能驾驶系统任务感知、决策和控制能力方面。智能驾驶车辆系统根据测试环境可以将测试技术分为虚拟仿真测试、封闭场地测试和实际道路测试[1-3]。虚拟仿真测试具备测试场景方便搭建、测试过程可重复、成本高和效率低特点。一般应用于算法开发迭代验证阶段,多应用于控制器、传感器等零部件产品测试和验证。封闭场地测试是在封闭试验场地内完成,测试过程场景有限,按照标准规范进行测试和验证。一般应用于整车级功能和性能验证。实际道路测试具有场景覆盖广,整车系统验证充分有效的特点。实际道路测试目前没有标准的法规作依据。大部分实车验证测试以委托单位提供的测试需求规范作为依据,结合驾驶员和工程师的主观判断进行整车功能验证和评价。
为了满足智能网联汽车测试和评价充分性和有效性的要求,必须有合适的验证方法[4-5]。智能网联汽车验证最有效的方法就是道路测试,让汽车在实际驾驶的复杂场景、工况下进行实车测试。智能驾驶车辆行驶时经过弯道时候传感器和控制器需要协同完成复杂的横纵向耦合运动[6],智能驾驶车辆在不同弯道场景下,驾驶表现不同,弯道曲率半径越小,曲率越大,车辆的行驶能力要求更高。车辆的操控性能评价中有关于车辆转弯居中保持的评估,CCRT车评中有关于车辆在居中保持过程中表现的评价。这些评价以行业专家经验进行驾乘评分。专家的主观评价[7]方法从自动驾驶车辆智能性本身出发,利用专业的知识、经验和判断,通过观察被评价对象的表现或状态,以归纳分析等非量化手段对自动驾驶车辆智能性进行评价[8-10]。评价结果是宏观的智能性水平划分,而非精确的数值。只有当自动驾驶车辆的智能性水平存在显著差异时才能区分出性能优劣,针对自动驾驶车辆产品无法做出智能性水平的详细验证和精确评价,无法为研发方向提供精确性引导。
定量评价方法采用数学的方法[11-12],以收集和处理数据资料为依据,以精确的数值概括全部的评价信息,包括独立指标评价方法和联合指标评价方法。定量评价以精准数值表达全部的评价信息,适用于需要对同车辆的智能性优劣做精确分析的场合。评价结果直观明确,利于工程实践和自动驾驶车辆性能逐步提高。
为定量验证和评价智能驾驶车辆居中保持能力,提出一种适用实际道路试验的验证模型和方法,包括模型设计、试验验证和测试评价。验证结果可以客观定量地评价车辆车道居中保持智能性。
1 测试评价方法简述
1.1 车道居中保持评价思想
车道居中保持功能是指车辆始终保持在当前车道的正中间行驶,稳稳的通过直道、弯道,而不是在识别到即将“撞线”(偏离车道)之后系统再进行方向的纠正。车道居中保持也是判断车辆是否达到L2级别辅助驾驶等级的一个重要指标[13]。但是车道居中保持智能度的客观验证和评价还需要进一步研究。在实际道路开启车道居中保持功能行驶时,车辆中心轴线距离车道中心轴线都有随机偏置距离。距离偏置程度能够直观体现车道居中保持功能性能。智能度评价可以通过专家实车感受进行分析和判断,结果具有一定的参考意义。虽然专家主观判断能够给予车辆功能优化指导建议,但是不能够明确车辆居中保持功能的智能化程度。
客观判断车道居中行驶根据偏置车道中心轴线距离判定功能智能化程度,车辆在实际道路行驶时,专家主观评测对车辆居中行驶能力的评价不够科学合理。因此,文章提出一种以持续时间为判定指标的量化评价方法。在评价模型中,相对于行驶中的车道线,车辆行驶轨迹可以被看作以车辆中心为轴线的中心线。城市、城郊道路系统中车速不高、车辆频繁变道且弯道道路较短,此时利用评价模型中的驶入时间作为评价指标不合理,不能够科学地评价智能驾驶车辆的居中保持能力。因此在路况良好的高速公路进行测试可以更好应用评价模型。
1.2 车道智能化区域划分
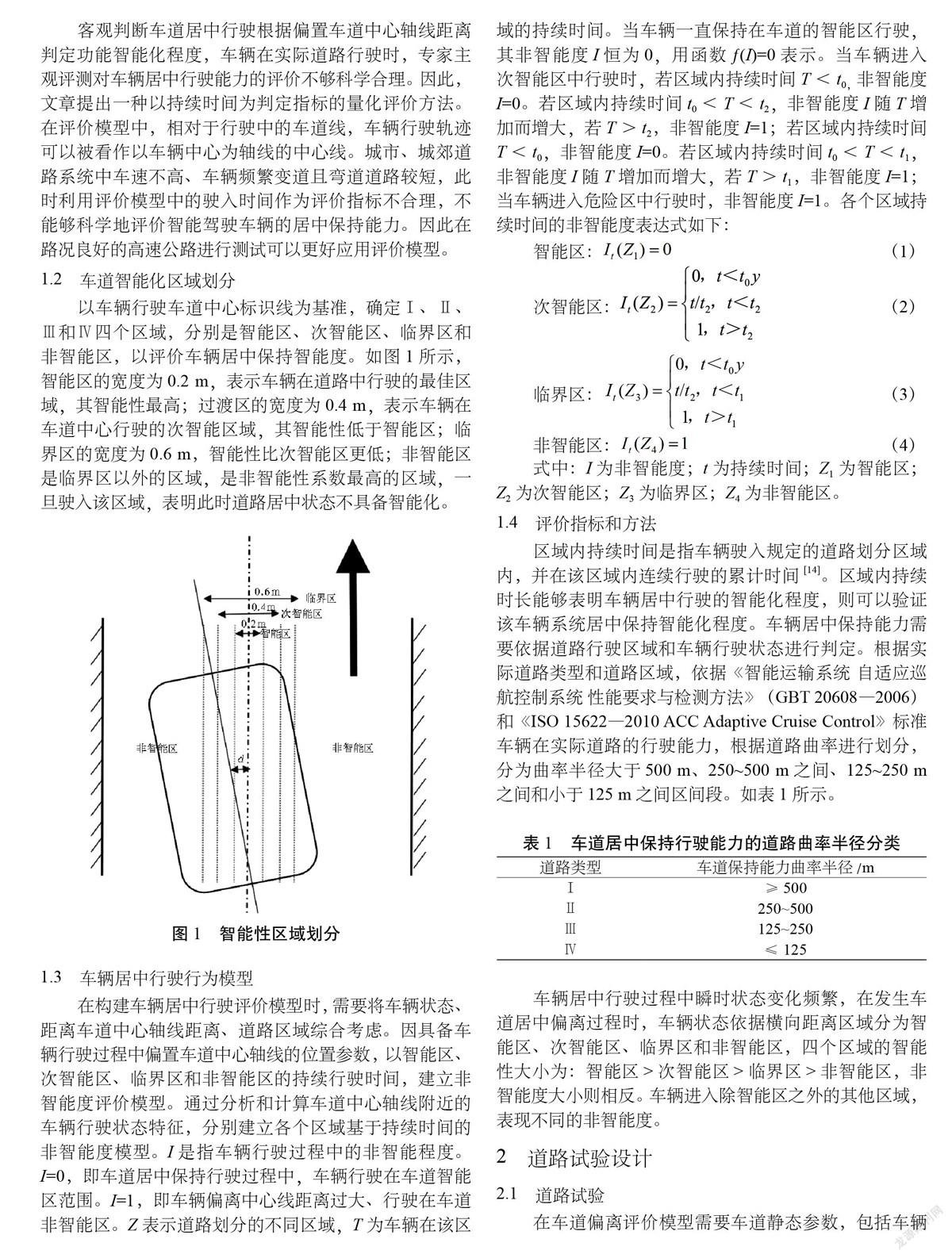
以車辆行驶车道中心标识线为基准,确定Ⅰ、Ⅱ、Ⅲ和Ⅳ四个区域,分别是智能区、次智能区、临界区和非智能区,以评价车辆居中保持智能度。如图1所示,智能区的宽度为0.2 m,表示车辆在道路中行驶的最佳区域,其智能性最高;过渡区的宽度为0.4 m,表示车辆在车道中心行驶的次智能区域,其智能性低于智能区;临界区的宽度为0.6 m,智能性比次智能区更低;非智能区是临界区以外的区域,是非智能性系数最高的区域,一旦驶入该区域,表明此时道路居中状态不具备智能化。
1.3 车辆居中行驶行为模型
在构建车辆居中行驶评价模型时,需要将车辆状态、距离车道中心轴线距离、道路区域综合考虑。因具备车辆行驶过程中偏置车道中心轴线的位置参数,以智能区、次智能区、临界区和非智能区的持续行驶时间,建立非智能度评价模型。通过分析和计算车道中心轴线附近的车辆行驶状态特征,分别建立各个区域基于持续时间的非智能度模型。I是指车辆行驶过程中的非智能程度。I=0,即车道居中保持行驶过程中,车辆行驶在车道智能区范围。I=1,即车辆偏离中心线距离过大、行驶在车道非智能区。Z表示道路划分的不同区域,T为车辆在该区域的持续时间。当车辆一直保持在车道的智能区行驶,其非智能度I恒为0,用函数ƒ(I)=0表示。当车辆进入次智能区中行驶时,若区域内持续时间T
智能区: (1)
次智能区: (2)
临界区: (3)
非智能区: (4)
式中:I为非智能度;t为持续时间;Z1为智能区;Z2为次智能区;Z3为临界区;Z4为非智能区。
1.4 评价指标和方法
区域内持续时间是指车辆驶入规定的道路划分区域内,并在该区域内连续行驶的累计时间[14]。区域内持续时长能够表明车辆居中行驶的智能化程度,则可以验证该车辆系统居中保持智能化程度。车辆居中保持能力需要依据道路行驶区域和车辆行驶状态进行判定。根据实际道路类型和道路区域,依据《智能運输系统 自适应巡航控制系统 性能要求与检测方法》(GBT 20608—2006)和《ISO 15622—2010 ACC Adaptive Cruise Control》标准车辆在实际道路的行驶能力,根据道路曲率进行划分,分为曲率半径大于500 m、250~500 m之间、125~250 m之间和小于125 m之间区间段。如表1所示。
车辆居中行驶过程中瞬时状态变化频繁,在发生车道居中偏离过程时,车辆状态依据横向距离区域分为智能区、次智能区、临界区和非智能区,四个区域的智能性大小为:智能区>次智能区>临界区>非智能区,非智能度大小则相反。车辆进入除智能区之外的其他区域,表现不同的非智能度。
2 道路试验设计
2.1 道路试验
在车道偏离评价模型需要车道静态参数,包括车辆距离左、右侧车道线位置,车道中心轴线位置,车辆中心轴线距离车道中心轴线。
为了验证智能车辆居中保持行驶性能评价模型,选取适合评价模型的高速公路不同曲率范围的路段进行实际道路测试。依据《智能运输系统 自适应巡航控制系统 性能要求与检测方法》(GBT 20608—2006)和《ISO 15622—2010 ACC Adaptive Cruise Control》照标准车辆在实际道路的行驶能力,根据道路曲率进行划分,分为曲率半径大于500 m、在250~500 m之间、在125~250 m之间和小于125 m,共四种曲率半径类型。
在高速实际道路试验,以具备车道居中保持功能的量产车型作为试验车,如图2。通过非智能度计算方法对居中保持能力进行验证和评价。车辆长和宽分别为:L=4.694,W=1.85;车辆中心距离车道左、右侧距离作为模型的输入参数。设定b1=±0.1 m,b2=±0.2 m,b3=±0.1 m。
2.2 车辆居中行驶特性分析
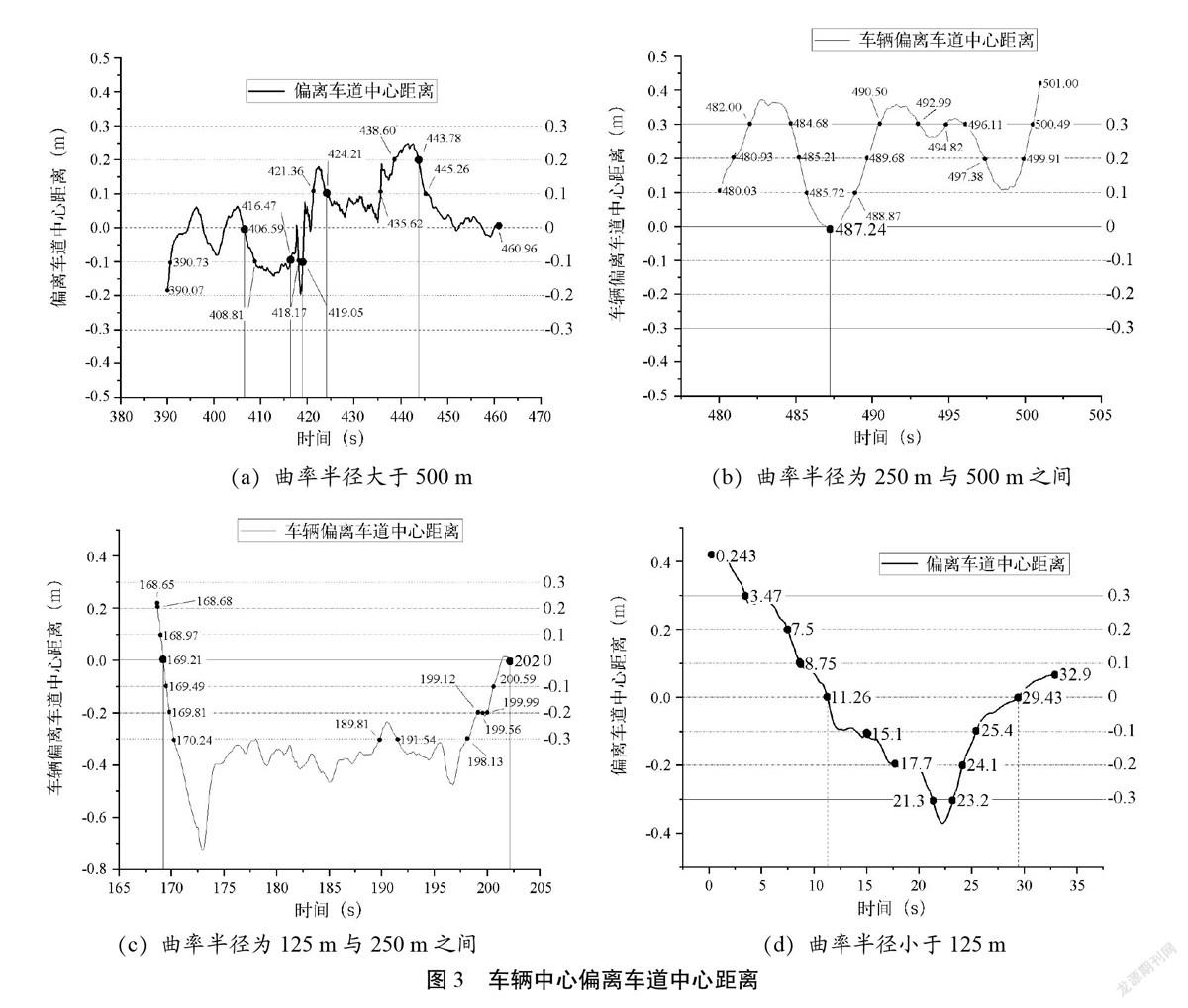
在选取上述四类道路曲率的实际道路进行验证,根据试验车辆车道居中保持行为特征试验数据进行分析和计算,车辆偏离车道中心轴线距离如图3所示。
根据图3可知,偏离车道中心轴线的距离按照每0.1 m刻度分为四个区域,智能区在±0.1 m内;次智能区在0.1~0.2 m和−0.1~0.2 m之间;临界区在0.2~0.3 m和−0.2~(−0.3)m;非智能区在±0.3 m外。道路曲率半径大于500 m的车道道路,车辆偏离车道中心轴线距离整体比较小,主要集中在智能区和次智能区;道路曲率半径在250~500 m之间范围,车辆偏离车道中心轴线距离集中分布在临界区和次智能区而且偏向一侧;道路曲率半径在125~250 m之间范围,车辆偏离车道中心轴线距离集中分布在非次智能区而且偏向一侧。道路曲率半径小于125 m范围内,车辆偏离车道中心距离离散分布在四个区域。
通过车辆居中行驶行为,采用智能度评价模型,四种不同道路曲率半径按照智能区、次智能区、临界区和非智能区的持续时间进行分析和计算,如表2~5所示。
上述表2至表5,分别是道路曲率半径大于500 m、在250~500 m之间、在125~250 m之间和小于125 m时候不同区域的非智能度。不同曲率路段的非智能度依据求取每个路段各个区域的智能度之和平均值计算。道路曲率半径大于500 m、在250~500 m之间、在125~250 m之间和小于125 m时的非智能度分别是0.187、0.628、0.506和0.473。从各个道路曲率路段的非智能度可知,该次试验道路曲率半径大于500 m时,车辆居中保持智能性明显优于其他曲率半径路段。道路曲率半径小于125 m、在125~250 m之间和250~500 m之间时,车辆居中保持智能化程度基本一致。
3 结论
(1)文中提出了车辆居中保持性能评价方法,以车道中心轴线为基准划分四种智能区,采用车辆驶入各个区域的持续时间作为非智能度的评价指标,建立非智能度评价模型。
(2)在车辆居中保持功能运行状态下,以标准依据按照不同曲率类型将实际道路分为小于125 m、125~250 m之间、250~500 m之间和大于500 m之间四类,并对以上不同曲率半径道路进行实车采集,通过计算分析得到试验车在车道居中行驶的智能度分别为0.473、0.506、0.628和0.187。
(3)通过选取实际道路典型曲率半径路段,对车道居中保持能力的测试验证和量化评价,客观评估了车辆车道居中保持能力,提出的量化测评居中保持性能技术方法为验证和评价智能驾驶车辆车道居中保持能力提供了参考和依据。
参考文献
[1]赫炎.智能网联汽车的测试评价[J].世界汽车,2021(1):
96-101.
[2]杨帅,季中豪,杨路鹏,等.基于实车试验的ADAS测试评价方法研究[J].汽车文摘,2020(11):39-46.
[3]李寒洋.浅谈智能网联汽车发展现状及趋势[J].汽车工业研究,2020(1):2-9.
[4]雷斌,张帅,梁荣亮,等.乘用车车道保持辅助主观评价方法研究[J].中国汽车,2020(9):10-13+25.
[5]陈媛媛,杨良义,张强,等.车道偏离预警系统开放道路测试评价方法研究[J].重庆理工大学学报,2020(8):63-69+94.
[6]赵世杰.智能车辆多传感器信息融合方法研究[D].长春:吉林大学,2020.
[7]胡广雪,邵毅明,钟颖,等.基于主客观评价的乘用车自适应巡航系统研究[J].公路与汽运,2019(2):5-9.
[8]陈君毅,李如冰,邢星宇,等.自动驾驶车辆智能性评价研究综述[J].同济大学学报,2019(12):1785-1790+1824.
[9]宋敏.基于国外技术研究方法的弯道驾驶行为特征统计分析[J].汽车技术,2019(12):18-22.
[10]谢旺.智能驾驶测试与评价技术研究综述[C].重庆汽车工程学会2019年论文汇编,2019:115-125.
[11]宋瑞,王羽,郑碧琪,等.基于中国智能汽车大赛平台的汽车智能辅助功能测试评价方法研究[J].汽车工业研究,2018(3):32-35.
[12]何承坤,宋娟,周唯.汽车自动驾驶测评方法研究[J].工业技术创新,2016(2):108-114.
[13]李鹏飞.汽车自适应巡航控制策略及测试场景研究[D].西安:长安大学,2020.
[14]李春梅.车道偏离预警模型及评价算法研究[D].昆明:昆明理工大学,2011.