一种差分导航信息收发系统的设计及实现
2022-02-27孙伟玮王馨悦门兰宁
孙伟玮,王馨悦,门兰宁
(1.海军装备部,陕西西安 710068;2.西安微电子技术研究所,陕西西安 710054;3.西安中星伟业通信科技有限公司,陕西 西安 710077)
随着2020 年7 月31 日北斗三号全球导航系统的全面建成开通,意味着我国导航设备的应用将出现井喷式增长,相应的对导航设备的需求也日益多元化,如定位方法从静态扩展到动态,服务领域从导航测绘扩展到国民经济的各个领域;性能要求也会越来越高,如定位精度从米级到亚米级甚至毫米级,授时精度由微秒级到纳秒级。在过去十几年的时间里,以GPS 为代表的卫星导航定位技术使高精度测量技术和方式发生了革命性变革,在此背景下,借鉴GPS 的研究经验,文中设计开发了一款基于无线、4G传输,支持北斗、GPS、GLONASS 等导航系统的差分导航信息收发系统,该系统可为近海用户、野外作业用户提供高精度的定位信息[1-4]。
1 差分定位原理
1.1 差分导航信息收发系统的组成因素
差分导航信息收发系统首先需要一个放置在已知点的基准站,其次是通过某种手段接收差分信息的移动站。为了保证差分信息的定位精度,移动站距离基准站不应超过50 km。基准站应尽量处于高处,无遮挡,远离大水体及复杂的电磁环境[5-8]。
1.2 差分定位分类
根据系统所服务的地理范围,差分导航系统可分为局域、区域和广域三大类,分别对应着不同长度的基线距离,一般来说基线距离越长,移动站利用差分信息定位的精度越差,也就是说广域、区域、局域的定位精度是依次降低的。
根据予以差分校正的目标量不同,差分导航可分为位置差分、伪距差分、载波相位平滑后的伪距差分及载波相位差分等[9-12]。
根据用户接收机定位结果的形式不同,差分定位可以分为绝对定位和相对定位。
根据差分信息源数不同,可分为网格差分定位和单基站差分定位[13]。
1.3 差分定位原理
导航接收机的误差主要包括信号传输途中的电离层误差、对流层误差、多径误差、导航星座的卫星时钟误差、星历误差,接收机噪声等。为了提高接收机的定位精度,应尽量消除以上误差。差分定位技术通过基准站的精准定位信息及导航卫星的PVT 信息反推以上各误差,然后通过某种手段传输给移动站导航接收机,进而消除接收机之间公共误差[14-15]。
导航接收机的伪距及载波相位观测方程如(1)、(2)所示:

由此可见通过差分计算可基本消除上述误差,以上误差源对定位结果的影响如表1 所示[3]。

表1 各误差源对定位结果的影响
2 系统设计
2.1 系统概述
该系统为全频点差分导航信息收发系统(包括GPS-L1、BD-B1、BD-B3、GLONASS-R1 等),支持RTCM2.X 及3.0 以上协议、NAEM0183 导航协议。系统主要由基准站、无线电台及发射天线、移动站组成。基准站通过4G 信号直接发送差分信息或通过串口向无线电台输出差分信息,无线电台通过900 MHz 频段无线信号将接收到的差分信息转发出去;移动站通过4G 或无线电的方式将接收到的差分信息用于差分定位。同时移动站还可以通过一路RS422 口或者WiFi 传输方式将差分信息转发出来,因此移动站也可作为一个短距离的差分信息中继站。
2.2 系统框架
基准站主要由电源模块、低噪声放大器、差分信息产生模块、4G 信号收发模块、对外通信模块等组成。组成框架如图1 所示。

图1 基准站组成框架
无线电台主要由电源模块、电台模块、功放、串口通信模块、发射天线组成。设计框图如图2 所示。

图2 无线电台设计框图
移动站主要由电源模块、低噪声放大器、差分信息处理模块、WiFi 模块、4G 模块、无线电收发模块、串口通信模块、天线模块等组成,设计框图如图3 所示。当移动站作为差分信息中继站时,有串口通信模块及WiFi模块两种方式可输出差分信息。
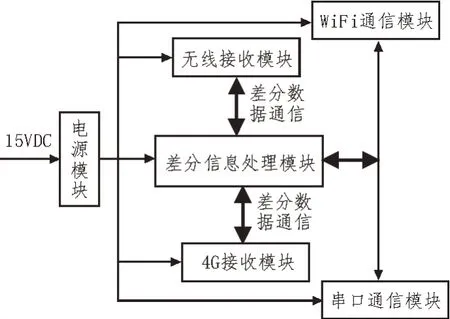
图3 移动站设计框图
2.3 系统实现
设备实物如图4 所示。

图4 系统实物
由于无线电的发射功率较大(1~5 W 可调),为防止其对导航信号及4G 信号的接收造成干扰,在架设系统时应将基准站与无线电台尽量分开架设,该系统设计最远可分开85 m,保证无线电台的发射信号不会影响基准站的信号接收。由于无线信号易受障碍物遮挡,故无线电台应尽量架设到高处空旷且尽量远离基准站的地带。
4G 通信由于使用移动运营商基站,不存在通信距离限制,但根据差分定位的原理,基准站与移动站之间存在空间传输误差相关性要求,因此利用4G 方式传输差分信息,移动站可在基准站方圆50 km 范围内保持差分固定解(高精度定位模式)的输出模式。
无线电的传输差分信息经测试,在城市环境中选择空旷郊区环境,经过跑车试验测试无线电通信距离可达19.5 km,在湖北省的某水库跑船测试水上通信距离可达15 km。
以上两种差分信息的传输方式基本满足陆上、水上多种使用场景,在以上试验场景中,移动站的差分定位精度基本在0.03 m 内,如图5(跑车、跑船数据)所示,比单点定位精度高出两个数量级,如图6所示。

图5 移动站差分定位精度

图6 移动站单点定位跑车精度
3 系统应用
该系统采用4G 及无线电两种差分信息传输方式,增大了该系统的适用范围,4G 传输在基准站和移动站导航信号的空间传输误差参数相关的情况下,摆脱了无线信号传输距离及可视路径上障碍物的约束;无线电传输在移动运营商基站信号较差的海上应用环境中,可继续为移动站提供差分信息,无线电的组网功能可使基准站同时为多个移动站提供差分服务;移动站的中继功能为某些不具备无线或4G 接收功能的导航设备提供了差分定位的可能性。基于该系统的以上特点,该系统可应用于野外测量、驾校考试及各种水上载体的高精度导航定位的应用。
4 结论
该差分导航信息收发系统采用高速率的无线传输及4G 的方式传输差分信息,利用载波双差差分方式,主要消除了卫星导航系统的时钟公差、传输路径上的空间误差等大部分相关误差,通过陆上跑车、湖上跑船试验验证该差分系统的差分定位精度可达到5 cm 以下,大大提高了定位设备的精度。通过高速无线传输、4G 的传输方式及移动站的中继功能扩大了高精度导航设备的适用范围。
