基于MRF模型的飞机飞行动作识别划分算法*
2022-01-24颜廷龙王凤芹
颜廷龙,李 瑛,王凤芹
(1.海军航空大学岸防兵学院,山东 烟台 264001;2.海军航空大学航空基础学院,山东 烟台 264001)
1 引言
飞行动作的识别和划分一直是飞机健康监控、飞行模拟和飞行品质评估等应用的基础,快速准确地识别飞机的基本飞行动作和复杂飞行动作具有重要意义。由于民航飞机动作更加平稳,识别划分难度小,相关的研究已经比较成熟,而军用战机由于其机动性强、速度快的特点,其飞行动作识别一直以来都是难点问题。
目前,飞机动作识别划分主要分为以下几种方法:一是根据专家的先验知识,预先设定规则,建立知识库识别飞机的机动动作。倪世宏等[1]分析了军用飞机的飞行动作的变化特征,建立了基于专家先验知识和飞行动作特征的知识库来识别飞机的飞行动作,但这种方法的缺点在于面对不同的飞机型号,设置的规则不具有通用性,另外,专家的先验知识可能带有主观误差。二是利用目前的机器学习算法,比如贝叶斯网络、支持向量机和神经网络监督学习算法等。沈一超等[2]基于时间序列的DTW(Dynamic Time Warping)距离和贝叶斯网络推理,提出了一种基于贝叶斯网络的飞行动作识别算法,可以识别复杂飞机动作。这些方法要求预先将带有基本飞行动作标记的飞行时间片段作为训练集[3 - 6],训练一个分类器,区分不同飞行数据,要求事先人工标记训练集,工作量较大,而且模型的通用性不强。
马尔可夫随机场MRF(Markov Random Field)[7]模型是概率图模型的一种,它可以表示时间序列中相邻2个随机变量的相关关系,在飞行数据的时间序列中,可反映相邻时间点的参数的相关性。比如,飞机在t时刻的操纵参数,会影响t+1时刻的姿态参数。因此,本文在飞行动作识别领域,引入马尔可夫随机场模型,提出了一种基于马尔可夫随机场模型的飞机飞行动作识别划分算法,采用基于马尔可夫随机场的时序数据分割聚类算法,将飞行数据序列划分为多个动作类,并且用MRF网络描述其每个动作的特征。
2 飞行动作识别划分模型
2.1 马尔可夫随机场模型
马尔可夫随机场MRF是在随机场的基础上添加马尔可夫性质,使得随机序列变量的分布仅与前一时刻有关。这一性质提供了方便且具有一致性的建模方法,可以用来表示时间序列前后的约束关系。一维的马尔可夫随机场描述随机序列中某一时刻的状态只与前一时刻有关,二维的马尔可夫随机场常常被用在图像分割领域,将时域的马尔可夫特性转换到空间域,每个像元对于除它之外的相邻的像元组成的邻近集团存在依赖性,通过这一性质,进而有效地描述图像的局部统计特征。在多维时间序列上定义MRF网络,将多维时间序列描述为一个由随机变量组成的多层网络,相邻层的网络通过网络节点的边相连,网络各个节点之间的边描述各个变量之间的相关关系。区别于传统飞行动作分类方法依赖于飞行数据序列距离的度量[8],本文算法应用MRF的特性,用MRF网络表示飞行数据序列前后的依赖关系,从而得到更精确的飞行动作分类结果。
2.2 飞行数据时间序列分析
飞行数据是一组离散的时间序列数据,飞行动作识别的准确程度,很大程度取决于各个飞行动作的划分结果,本文提出基于马尔可夫随机场的时间序列分割算法,对飞行数据进行分割和聚类,以完成对飞行动作的划分。设飞机的一组长度为T的飞行数据为x=[x1,x2,x3,…,xT],其中xi(i≤i≤T)为n维向量,表示同一时刻采集的n维飞行数据。设需要将待划分的飞行数据分为K类,针对时间序列的聚类方式,不能仅对单独数据点聚类,还要根据数据前后的相关变化规律进行聚类,因此通过设置一个滑动窗口w,其中w≪T,w数值的选取取决于飞行数据的粒度和预期飞行动作的长度。以t时刻为基准,向前截取窗口大小的数据片段,记为Xt:
Xt=[xt-w+1,…,xt-1,xt]
其中,t=1,2,…,T,Xt为n×w维向量,将原始飞行数据截取长度为w的多个子序列,将此时针对飞行数据的聚类变为对长度为w的多个子序列的聚类,这样在聚类过程中,相邻的子序列更易被划分为同一类,实现时间一致性的目标。
设需要将待划分的飞行数据分为K类,属于第j类的数据段集合记为Pj,其中j=1,2,…,K。每个类用高斯协方差矩阵定义,类的协方差逆矩阵Θj反映各个参数之间的独立性。Θj是一个nw×nw矩阵,由w×w个子矩阵组成,每个子矩阵是大小为n×n的矩阵,位置pq上的子矩阵描述p时刻和q时刻之间,n个维度之间的协方差逆矩阵。由于飞行数据是非时变的,即每一个点的参数值只与相应时间差有关。
2.3 基于MRF模型的飞行动作识别划分算法
MRF模型需要根据统计决策和估计理论中的最优准则确定时间序列分割问题的目标函数,采用一些优化算法可求得满足这些约束条件的MRF最大似然分布[9]。本文采用多元飞行数据时间序列各个维度之间的协方差逆矩阵Θj定义了MRF网络的邻接矩阵,通过估计稀疏的高斯逆协方差矩阵来学习每个聚类的MRF,MRF网络具有多个层,层数对应于定义的短子序列的窗口大小,通过求解带约束的逆协方差逆矩阵估计问题,即可解决飞行动作的分类问题。那么,针对飞行数据时间序列进行划分和识别变为求解每类飞行动作的参数之间的协方差逆矩阵Θ={Θ1,Θ2,…,ΘK}和每类飞行动作的数据段集合P={P1,P2,…,PK}。
用负对数似然函数表示飞行数据段Xt被归为基本动作j类的代价,如式(1)所示:
E(Xt∈Pj)=-ll(Xt,Θi)=
(1)
其中,ll(Xt,Θi) 表示对数似然函数,μi表示矩阵Θi的均值,detΘi表示矩阵Θi的行列式。
考虑飞行数据的连续性,相邻时刻的数据段属于不同类时施加惩罚项β,β越大,相邻的飞行数据子序列被划分为同一类动作的可能性越大。当β=0时,飞行数据子序列可以被单独划分,连续性惩罚项表达式如式(2)所示:
(2)
由于极大似然估计不能产生稀疏解,导致模型的复杂度过高,不方便求解,需要加入稀疏性约束,增加正则化惩罚项,如式(3)所示:
λ‖Θi‖
(3)
其中,λ是正则化参数。稀疏化可以极大地简化网络结构,一定程度上降低了本文算法的复杂性,还可以提高模型的泛化能力,解决模型的过拟合问题。
综上所述,模型的总体优化函数如式(4)所示:
(4)
3 飞行动作识别划分模型的求解方法
MRF模型的总体优化函数求解是一个组合和连续优化问题,飞行动作划分参数的求解和飞行动作类参数协方差逆矩阵的求解互相耦合,是高度非凸的优化问题。解决这一问题的关键在于采用期望最大化EM(Expectation Maximum)算法将总体优化目标转化为飞行动作识别和飞行动作划分2个子问题,交替更新参数,迭代求解,其中飞行动作划分参数使用动态规划算法求解,飞行动作识别参数采用交替方向乘子法ADMM(Alternating Direction Method of Multipliers)求解[10]。
3.1 飞行动作划分的参数求解
针对飞行动作划分的参数Pj的求解问题,首先要给定Θj,此时Pj的优化要考虑2个方面的问题,一是飞行数据段Xi被归为j类的代价,可以用负对数似然函数和表示,即式(1),另一个是飞行数据的连续性约束,应用式(3)表示。2个代价构成典型的流水线问题,可以采用动态规划算法进行求解[11]。
动态规划算法将T个子序列X1,…,XT分配到K个聚类的问题,等效为找到时间戳1~T的最小代价路径,其中节点代价是将该数据段分配给飞行动作的负对数似然函数和,并且每当分类改变时,边的代价为β。
3.2 飞行动作识别参数矩阵的求解
首先要给定一类中所有数据段的集合Pj,通过求最小化负对数似然总和,可以求解Θi,如式(5)所示:
E1+E2
(5)
其中,E1=-|Pj|log det(Θi),E2可以写成迹的形式,如式(6)所示:
(6)
其中,Si是经验协方差,由当前Pj所有数据段计算得到。考虑矩阵的稀疏性,添加一个正则项λ‖Θi‖,所以逆协方差逆矩阵的优化函数如式(7)所示:
(7)

本文采用ADMM算法,ADMM是一种分布式凸优化算法,主要应用在大规模优化任务中[12]。为了使问题更符合ADMM算法的形式,引入变量Z并将原问题重写为等效问题,如式(8)所示。
min(-log detΘ)+tr(SiΘ)+‖λ·Z‖1
subject toΘ=Z,Z∈Γ
(8)
其增广拉格朗日函数为:
Lp(Θ,Z,U)=-log detΘ+tr(SiΘ)+
(9)
(10)
(11)
Uk+1:=Uk+Θk+1-Zk+1
(12)
其中k是迭代参数。
3.3 EM算法求解整体优化问题
本文利用迭代EM算法[13]解决数据段分类和聚类参数协方差逆矩阵的问题。随机初始化集群,并且交替执行E-step和M-step,直到每个簇的分配已经固定,模型已经收敛。本文算法的求解步骤如下所示:
步骤1初始化模型参数Pj,Θi;
步骤2执行E-step,给定Θi,应用动态规划算法将飞行数据分到各个飞行动作类,求解Pj;
步骤3执行M-step,给定Pj,应用ADMM算法更新飞行动作识别参数Θi;
步骤4重复执行步骤2和步骤3,不断地迭代直到算法收敛。
4 实验与结果分析
4.1 实验方法
为了方便验证本文算法的准确性,采用海军某型飞机的50次飞行任务记录的飞行数据进行实验,每次飞行任务的时长大约为1 h,将每次飞行任务的数据划分为10组,共500组。选取其中与飞行动作识别相关的发动机转速、飞行速度、飞行高度、航向角、俯仰角和倾斜角6个参数。为了验证实验结果,飞行数据已经事先采用人工标记各个阶段所属的基本飞行动作,飞行数据的采样间隔均为1 s,算法的参数设置为:滑动窗口大小w设置为5,根据飞行基本动作的种类,将聚类簇的个数K设置为5。
4.2 识别率对比
由于飞机机动平飞的过程占很大一部分,所以单纯使用识别率不足以来评价算法的识别效果,本文使用Macro-F1 值评价各个算法的识别准确率。Macro-F1值计算方式是先计算每一个类的Precison和Recall后,再计算各个类的F1值,然后将各个类的F1值的平均值,其中:
(13)
表1是本文算法(记为MRF)、基于高斯混和模型的聚类算法(记为GMM)[14],基于欧氏距离的DTW算法(记为DTW)[15]、基于自组织图的人工神经网络聚类方法(记为Neural Gas)[16]和k-means算法针对测试样本聚类的Macro-F1值和部分动作识别准确率。
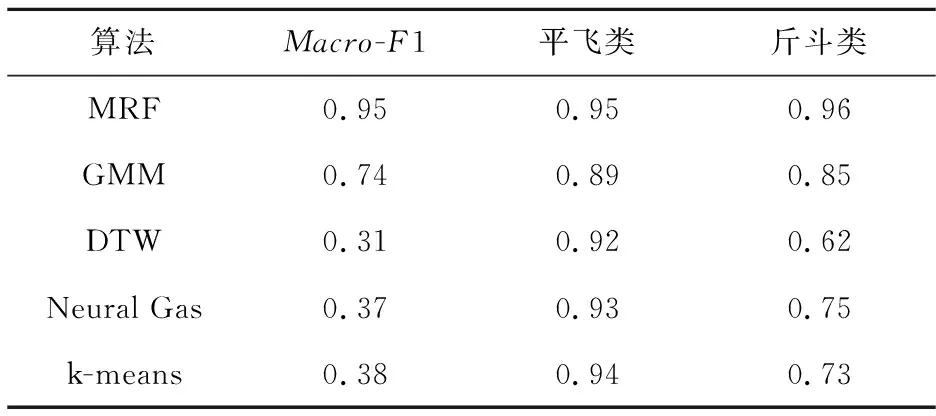
Table 1 Comparison of Macro-F1 values of various algorithms
从表1可以看出,虽然5种算法对平飞的识别准确率都很高,但DTW、k-means、Neural Gas对于斤斗类动作的识别准确率较低。斤斗类的飞行数据变化比较复杂,而这些算法大多使用基于距离的判定规则,无法识别飞行数据表示的本来特征。所以,本文算法在复杂动作的表现上优于其他基于距离的算法。
接下来测试各个算法需要多少样本才能准确聚类,识别飞机动作。图1所示为5种算法的Macro-F1值与样本数量的关系图。如图1所示,本文算法的性能明显优于其他算法,Macro-F1的值为0.91~0.98。与其他基于距离的聚类算法相比,本文算法只需更少的样本就能达到相似的准确率,而基于距离的聚类算法的结果准确率不高,难以对飞机动作进行划分。
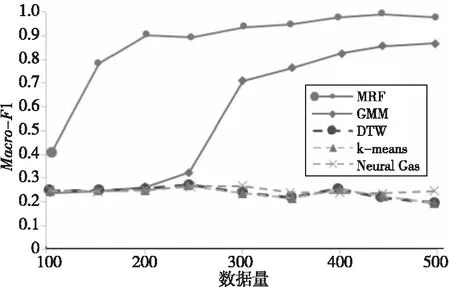
Figure 1 Relationship between Macro-F1 value and data volume图1 Macro-F1值和数据量关系
当有100个样本时,没有一种算法能够准确地识别飞机的动作。但是,随着样本量的增多,基于本文算法的准确率迅速提高。当有200个样本时,本文算法的Macro-F1已经超过0.9。
4.3 模型参数分析
(1)时间一致性参数。
图2所示为本文所提算法和去除算法中时间一致性约束MRF(β=0)的Marco-F1值和数据量之间的关系。由图2可知,由β定义的时间一致性约束在数据量较小时仅具有很小的影响,因为MRF和MRF(β=0)都获得了相似的结果。但是,随着样本数量的增加,MRF(β=0时)的Marco-F1徘徊在0.9附近。这意味着,一旦有足够的样本,飞行数据连续性约束这一参数的设置是提高算法性能的决定性因素。
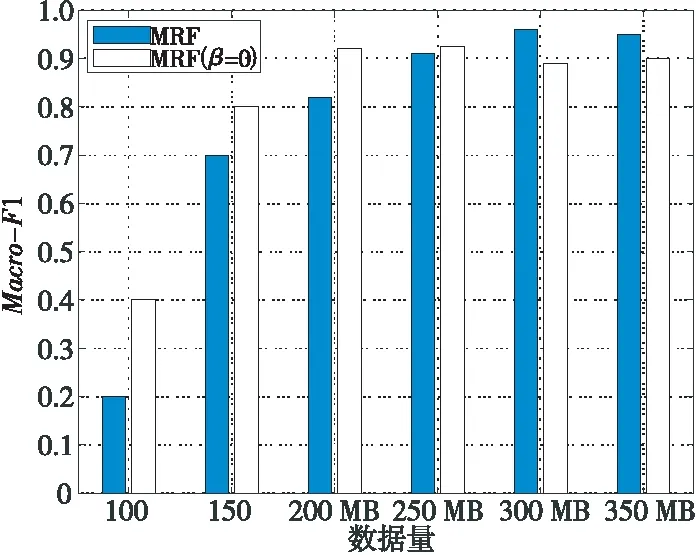
Figure 2 Influence of time consistency parameter 图2 时间一致性参数影响
(2)滑动窗口大小分析。
图3所示为本文算法中滑动窗口大小和Marco-F1值之间的关系,可以观察到算法滑动窗口大小设置为4~15可得到较高Marco-F1聚类准确率评分。只有在窗口大小降至4以下或升至10以上时,算法准确率较低。
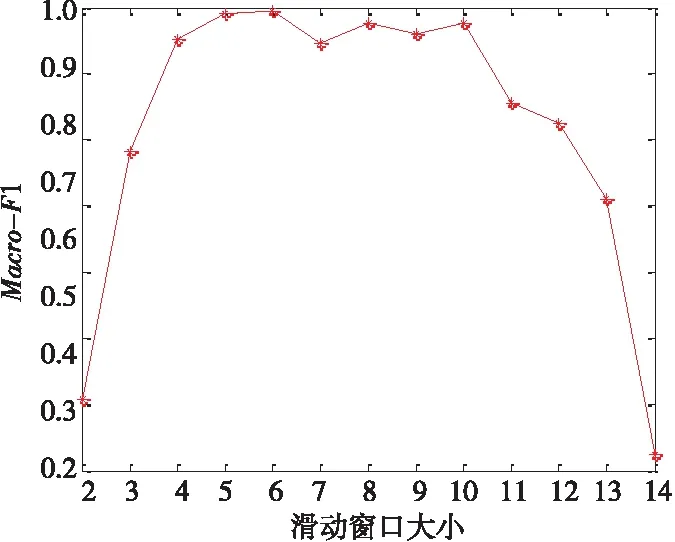
Figure 3 Influence of sliding window size 图3 滑动窗口大小影响
5 结束语
本文研究了基于MRF模型的飞机飞行动作划分和识别算法,算法在对飞行动作准确识别和划分的同时,还提供了结果的可解释性。通过对比其他算法的Macro-F1值表明,本文算法提高了飞行动作识别的准确率。
