生物流体驱动系统及其仿生
2022-01-23王影杰刘思佳马文星刘春宝
郝 歆, 王影杰, 刘思佳, 金 苗, 马文星, 任 雷, 刘春宝
(1.吉林大学 机械与航空航天工程学院, 吉林 长春 130022;2.吉林大学 工程仿生教育部重点实验室, 吉林 长春 130022; 3.曼彻斯特大学 机械航天和土木工程学院,英国 曼彻斯特)
引言
从细胞分裂和深海中自卫防御到节肢动物的快速运动,这些生物机理可以简单地描述为利用流体压力变化在密封空间中提供动力传递,这实际上是帕斯卡定律和液压的基础原理。许多生物体在体内或体外使用加压液体来传递能量,拥有生物流体驱动系统。如蜘蛛部分关节使用液压而不是肌肉来伸展步足[1],海星使用一种叫做水管系的系统和管足来移动[2]。此外,软体动物、腔肠动物、脊索动物、蠕虫和一些昆虫幼虫也利用流体驱动。依靠自然选择, 生物流体驱动系统进化为高性能模式。
流体驱动是一项重要的工业技术,具有功率密度比大、输出力和转矩大、动态特性好、布置灵活、控制方式多样化等优点[3-4]。这项技术已广泛应用于机器人,如Atlas[5]、HyQ[6]和下肢外骨骼[7]。但目前的流体驱动系统普遍存在结构复杂、响应时间长、噪音大等问题。尽管机器人的泵、阀、缸等元件已经很紧凑和轻质,但仍然存在高能耗、低效率、体积和重量大等问题,流体驱动机器人尚有无限潜力。因此,有必要研究如何结合新技术、新理论、新方法来提高流体驱动系统的竞争力,并将其应用拓展到新的应用领域。
自然界流体驱动系统用很低的内部压力实现了高效的驱动,对其开展仿生研究可为传统流体驱动的高效率与功率质量比、结构紧凑、运动协调控制、稳定性、可靠性、环境友好性等方面的进一步优化提供参考。因此,以生物流体驱动系统为仿生模型,发现解决流体驱动问题和挑战的新思路和新方法,为解决技术瓶颈提供重要的启发,并有助于开发一种新型的仿生流体驱动系统。
1 生物流体驱动系统的种类
生物流体驱动系统可用于多种运动方式,如多足步行、蠕动爬行、喷射推进、洞穴挖掘等。这些生物驱动原理与许多肌肉驱动的生物体及仿生机器人完全不同。具体讨论几种典型的拥有流体驱动系统的动物,以阐明独特的生物流体驱动系统如何实现生物功能,其流体驱动系统原理如图1所示。
1.1 蜘蛛液压关节步足行走
蜘蛛是典型的节肢动物,步足的7个关节中胫节-跗节和腿节-膝节关节是液压关节,关节中没有伸肌,关节膜内充满液体,通过流体驱动力产生扭矩,使得关节伸展[8]。
蜘蛛的循环系统由血淋巴血管系统、复杂的腔和腔隙、中央泵送器官、心脏和动脉组成。传动压力的来源主要为前体,在关节伸展时,前体背腹肌肉收缩,血淋巴被压缩进入步足中[9]。腔隙是血淋巴快速传输的通道,在关节转动过程中,肌肉、动脉、神经和外骨骼之间的腔隙用来传输血淋巴到关节处或更远的步足节段[10],如图1a所示。蜘蛛身体和步足的压力分布是循环所必需的,步足血淋巴压力略高于前体,前体血淋巴压力略高于后体,但差异不大[11],静止与行走状态的压力有明显差异。
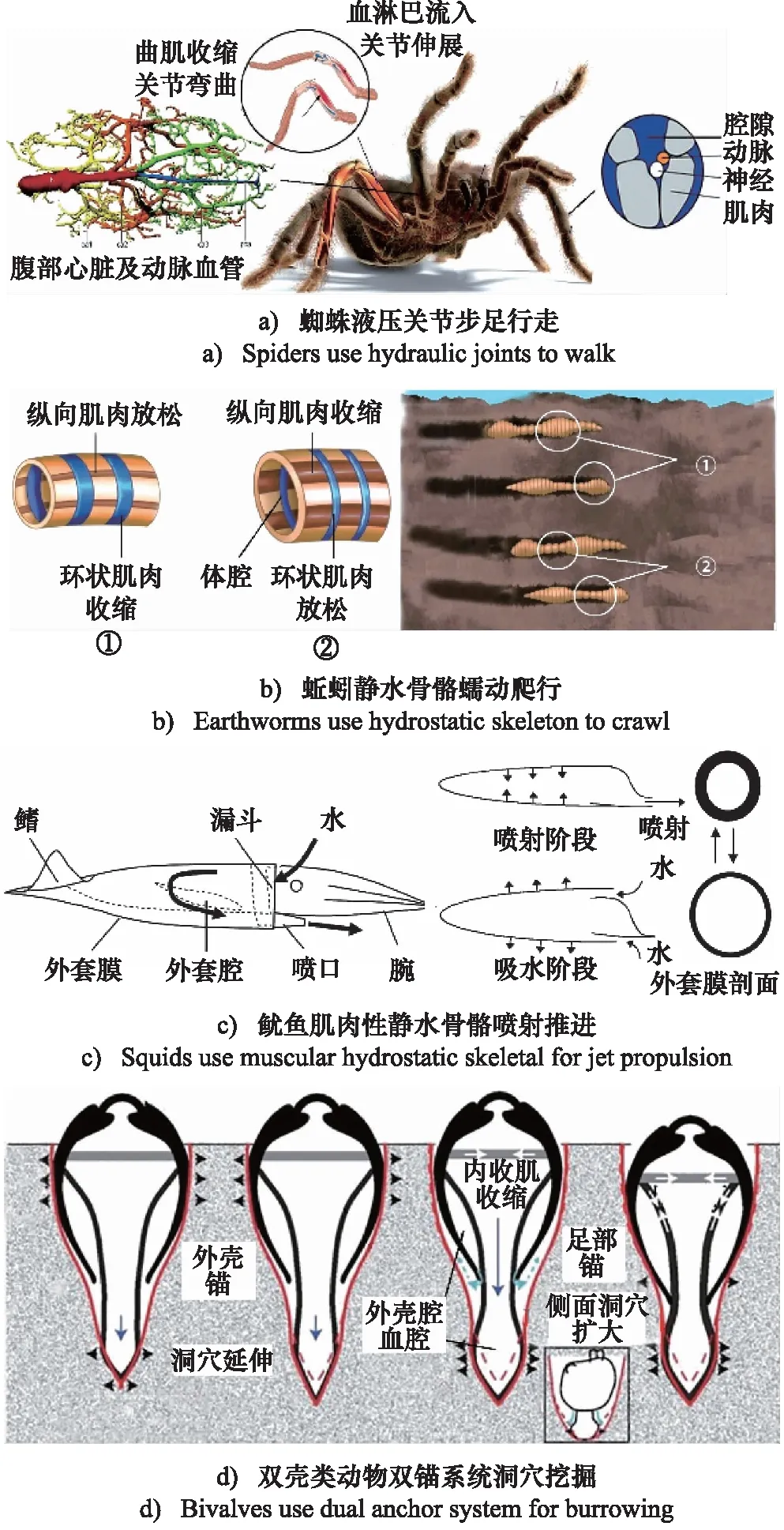
图1 生物流体驱动系统原理图
蜘蛛行动迅速[12-13],存在着高度的智能化,运动感知、实时反馈、快速控制来实现不同介质环境下的运动。作为尚未被彻底研究的智能闭环流体驱动系统,蜘蛛的生物流体驱动系统组织良好,控制精确,并具有快速调整以允许移动的能力,具有实时模式和理想模式之间的快速切换机制,以实现高效传输和移动,可以实现最低的能耗和最大的功能输出。
1.2 蚯蚓静水骨骼蠕动爬行
蚯蚓是典型的软体动物,依靠带有充液腔的静水骨骼来支撑身体[14]。静水骨骼以具有一定压力的液体实现硬骨骼的支撑作用,具有支撑身体结构与进行柔性动作和输出力的能力。这些静水骨骼通常由环形肌和纵向肌组成圆柱形的身体。
蚯蚓有一个清晰的分段结构,称为异界。每个节段都由隔膜隔开,有自己的离散充液腔,每个充液腔中包含了不可压缩液体。如图1b所示[15],蚯蚓的身体起着蠕动泵的作用,体液的体积不变,纵向肌肉的收缩会缩短其身体长度并增加其径向直径,而环状肌肉的收缩会减小其径向直径并延长其身体长度[16]。蚯蚓通过利用其肌肉产生的收缩和扩张产生一种蠕动波,从尾部移动到头部,用于移动和挖洞,这一过程类似于肠道的蠕动。
与硬的骨骼动物相比,拥有静水骨骼的蚯蚓在运动时没有刚性的关节角度变化,只是身体局部的尺寸有变化,可以用很少的肌肉实现运动自如。流线柔软的圆柱形身体使蚯蚓有一个缓冲机制,保护内部器官以免受到冲撞,可以通过狭小的通道和更有效地逃跑、隐藏自己。
1.3 鱿鱼肌肉性静水骨骼喷射推进
海洋动物和陆生动物驱动机制存在明显的差异,陆地动物的机制表现为利用体内的压力变化,工作介质是体液。而海洋动物的机制主要以喷射推进为基础,其工作介质往往是周围的水。
鱿鱼是自然界中最常见的喷射推进器,鱿鱼采用肌肉性静水骨骼和一个大的充液腔来实现喷射推进,迅速实现高加速度[17]。鱿鱼外套膜由一圈环状肌和连接内外被膜的纵向肌组成,外套膜自然围成一个充液腔——外套腔。如图1c所示[18],在喷射之前,喷口闭合,纵向肌收缩,外套膜变薄、膨胀,在外套腔内形成负压,水流进入外套腔而实现充水。外套腔内充满水后,喷口张开,环状肌收缩,外套膜变厚,直径缩小,将外套腔内的水喷出,使鱿鱼受到与水流方向相反的作用力,从而实现运动[19]。
鱿鱼对比普通鱼类,即使在喷射速度小于周围流体速度时,喷射推进也能产生推力。通过以较低的速度喷射较大质量的液体,从而获得较高的推进效率[20];且频率较低,推进噪声极小。
1.4 双壳动物双锚系统洞穴挖掘
双壳类动物依靠壳的开闭与腹部的射流推进实现缓慢运动。而当双壳类动物穴居时,足部的充液腔在利用双锚系统挖掘洞穴中起着重要作用[21-24]。
如图1d所示,双壳动物在挖洞时,当足探测和延伸时,打开的外壳起到锚的作用,而当外壳闭合向下拉入沉积物时,膨胀的足起到锚的作用。双壳动物主要有2个独立的充液腔:血腔和外套腔。外壳当锚时,双壳打开,虹吸管闭合,足部横向肌的收缩完成足部伸展。足部当锚时,内收肌收缩,血液进入足部的血腔,高压力导致了典型的球根状足部,这确保了足部作为一个安全的锚,在足部收缩肌缩回时,将外壳向下拉;外壳闭合,外套腔中压力产生强大的水流,流体喷出通过松开邻近的沙子来帮助外壳的运动。这种双锚系统也描述了许多软体穴居动物的行为[25]。
2 生物流体驱动系统的特征
2.1 系统构成
工程液压系统主要由液压泵(动力元件)、液压缸/液压马达(执行元件)、液压阀(控制元件)、油箱/蓄能器/过滤器/管道和热交换器(辅助元件)等组成。根据不同种类生物流体驱动机理,推断出生物流体驱动系统的存在需要3个必要的特征:动力源、腔体和工作介质。动力源类似于液压泵,腔体类似于液压缸,工作介质类似于液压油。这一概念与流体驱动人工肌肉相似,后者包含可压缩骨骼、柔韧皮肤和流体介质[26]。
生物流体驱动系统的动力源始终是肌肉。肌肉组织是精心安排的,以便可以控制腔体的直径和长度。充液腔常见的肌纤维方向包括环状肌、径向肌和横向肌[27]。此外,许多充液腔的壁是由结缔组织纤维层加强的,这些纤维层可以控制和限制形状变化[28]。环状肌、径向肌和横向肌的收缩会使直径减小,从而增加压力,导致长度的增加。延伸后,纵向肌收缩,直径再次扩大,从而使环状肌、径向肌和横向肌再次伸长,从而导致缩短。因此,纵向肌和环状肌、径向肌和横向肌以类似于节肢动物或脊椎动物关节两侧肌肉的方式起拮抗作用。
工作介质可包括血液、细胞内液或海水。通过工作介质,可以在生物体内产生流体传动,如图2所示,分别为贻贝中海水三维速度剖面的体内循环和外部循环[29],水母游泳时外部压力的变化[30],蜘蛛步足内液体的流动[31]。液体工作介质具有不可压缩性。
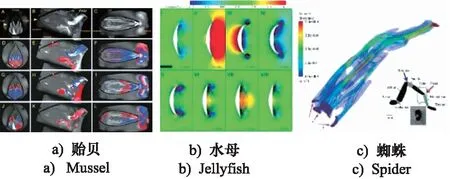
图2 工作介质流动分布图
腔体是流体驱动系统的重要标志。主要包括5种类型:节肢动物步足肌肉和血管包围的腔体,称为腔隙;昆虫幼虫的多功能器官消化腔,称为肠管;头足类、腹足类、双壳类动物中包含的外套腔;其他软体动物,称为体腔或血腔;海洋动物的胃血管腔。封闭腔如体腔,体积没有变化,一个方向伸长,必然有其他方向缩短。非封闭腔如外套腔,随着工作介质体积的变化,腔体体积可能发生改变。
2.2 系统特点
生物体必须获得最大的能量效率和最小的能量消耗才能生存,身体结构具有典型的轻量化特点,通常采用低压产生高功率输出。在生物流体驱动系统中,肌肉力压缩腔体,使其变形。腔内的工作介质将力传递到另一侧,产生变形并传递力。在此过程中动力的产生和传递是由肌肉、腔的大变形耦合在一起的。这一过程类似于工程液压系统中液压泵和执行元件的耦合效应。这种柔性驱动传动一体化集成提供了高效的能量转化与传递。
工程液压系统的工作介质是液压油,传动性能要求其比黏度和抗氧化能力,有极低的降解率,因此液压油泄漏会造成环境污染,工程液压系统还会因为液压泵容积交替时的压力脉动产生一种独特的流体噪声,对环境产生负面影响。生物体能够通过进食从环境中获取能量,且一个生物体可以持续进行日常活动,而无需补充能量(进食)数天。同时在生物流体驱动系统中,生物体利用体液或体外的水作为工作介质,来自自然,不会产生有毒有害物质,既环保又廉价。运动过程中,频率不高,往往噪音极小,充分体现环境友好性。
3 生物驱动传动的仿生应用现状
自然系统是技术创新和工程创造的灵感源泉。在生物流体驱动系统中,发现了许多有价值的功能,揭示生物流体驱动传动、能量转换的内在机理和规律,进而推动新概念、新思想的发现和仿生设计的创造。
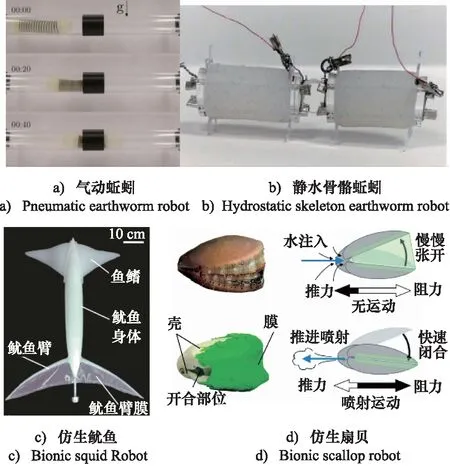
图3 常见气动与液动仿生柔性机器人
由于受到能源、动力、材料和制造方式的限制,现代机器人缺乏驱动、传动、传感和储能等功能的集成,因此无法复制它们的效率和自主性。软材料具有刚度小、柔顺性高等特点[35],可在大范围内任意改变自身形状、尺寸,使软体机器人拥有更安全的人机交互方式和自适应运动,但在自主和无约束运动中,实现驱动、速度和便携之间的性能权衡,仍然存在重大挑战。
2016年,哈佛大学的研究人员成功研制出了一款全柔性的Octobot机器人,如图4a所示,是首例完全由柔性材料组成的自主、无约束仿生章鱼机器人。该机器人由微流体逻辑控制,可以自动调节流体流动。燃料分解产生的气体使流体通道膨胀,从而产生驱动。流体和弹性体结构为完全柔软、自主的机器人奠定了基础[36]。2019年,AUBIN C A等[37]将驱动、液压动力传输和能量存储功能嵌入到无约束的水生软机器人中,提高未来机器人的自主性、效率和多功能性,如图4b所示。

图4 其他流体仿生柔性机器人
2021年,浙江大学李铁风教授团队开发了一种用于深海探索的自主软机器人,如图4c所示,该机器人将动力、控制和驱动在柔性基质中集成,机器人在马里亚纳海沟深度达到10900 m,在中国南海3224 m深的地方自由游泳,实现了在极端条件下设计柔软、轻便设备的潜力[38]。2021年,浙江大学团队依据蜘蛛心脏利用管状心脏将血淋巴泵到足部,从而驱动足部关节伸展机理,开发了一类完全软电子泵,证明软泵作为自由软机器人通用电源的广阔潜力,如图4d所示[39]。同时,该团队开发了一类软体电动流体驱动器(SEFAs),直接将电能转化为驱动器的机械能,通过电响应流体驱动外部弹性体变形,如图4e所示。SEFAs在便携性、可控性、驱动性、通用性、安全性和快速响应等方面表现出优异的综合性能[40]。仿生物系统的集成性和自主特性,为柔性机器人领域带来了革命性的变化,拥有更安全的人机交互方式和无约束运动能力。
4 仿生研究的发展趋势
随着仿生学科热度越来越高,仿生机器人从单纯的结构仿生[41],发展到功能仿生[42]、功能表面仿生,再到如今进一步发展到感知仿生、智能仿生。基于生物学原理,仿生机器人集成力觉、触觉、视觉、嗅觉、听觉等感知系统,独立完成信息感知-信号传递-信息处理,可实现仿生感知、人机交互系统与智能控制原理的有机结合。
4.1 驱动系统环境友好化
(1) 驱动效率高:利用体内或体外的液体来进行各种活动,通常采用低压产生高功率输出,实现低速但高效的驱动模式;
(2) 无污染:驱动系统所采用的工作介质与生活环境中的工作介质相同,如用过滤后的淡水或海水代替矿物油作为系统工作介质。因此, 系统在工作介质的排放过程中不会污染环境,而是会使介质回到原来的环境中。
4.2 柔性驱动传动系统集成一体化
(1) 肌肉和流体之间的相互作用对机器人的运动能力起着决定性的作用。相互作用过程中涉及的结构、材料、密封、振动、噪声抑制机制等方面的研究,对于不同的工程需要,都是值得深入研究的课题。
(2) 驱动、传动、控制一体化是仿生机器人的不断追求。随着仿生学、智能制造、智能材料的不断发展,这种集成技术可以通过新的制造方法将柔性驱动器,柔性阀、柔性传感系统和流体集成在一起,使系统具有体积小、重量轻、能耗低、可靠性高和智能化的特点。
4.3 智能化和高性能化
拥有智能自主系统的机器人是航空航天、军事、医疗和工业发展的不断需求。如图5所示[43],利用柔性驱动器、柔性传感器、柔性泵、柔性阀和信息处理与控制等进行智能化机器人系统集成。尤其是仿生柔性机器人涉及到仿生学、材料学、机械和力学等多学科交叉,以及仿生设计、智能制造、材料、电子、传感、能源、多模态动作和智能控制等技术融合,向高性能和智能化方向不断发展。
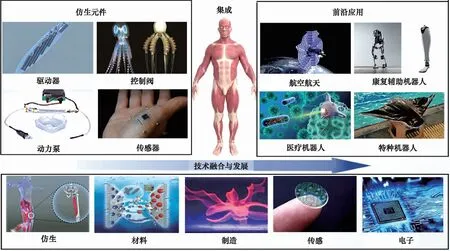
图5 机器人的融合与发展
5 结论
本研究综述了典型的流体驱动的生物和运动原理,总结了生物流体驱动系统存在的3个基本特征,即动力源、腔体和工作介质。同时总结了生物流体驱动系统的特点,结合特征和特点讨论了流体驱动系统仿生应用,并总结和探讨了仿生生物柔性机器人驱动系统环境友好化和柔性驱动传动系统集成一体化的自主性趋势,为仿生物机器人发展的提供新方向和新思路。
