离散数字液压高效防滑刹车算法
2022-01-23靳红涛焦宗夏1
吴 帅, 王 易, 靳红涛, 焦宗夏1,
(1.北京航空航天大学 自动化科学与电气工程学院, 北京 100191;2.北京航空航天大学 前沿科学技术创新研究院, 北京 100191;3.北京航空航天大学 宁波创新研究院, 浙江 宁波 315832)
引言
飞机刹车系统是飞机重要的子系统之一,承担着使飞机减速和停止的任务[1]。由于具有高功率密度的优点,液压刹车系统是目前主流的刹车系统[2]。液压刹车系统包括刹车控制阀、管路、刹车作动器以及刹车盘。刹车控制阀调节刹车压力,刹车作动器在压力作用下挤压刹车盘动盘与静盘摩擦产生刹车力矩, 使机轮减速,进而使飞机减速。刹车压力过高会使刹车力矩变大,机轮减速过快甚至抱死,此时机轮与地面相对滑动,轮胎会过度磨损甚至破裂,这将导致重大事故[3]。
传统液压刹车系统通常采用电液压力伺服阀作为刹车控制阀[4]。电液压力伺服阀多为二级先导结构,通过内部油道反馈刹车压力与先导压力相平衡来实现压力调节[5-7]。刹车过程中温度急剧升高,高温导致液压油碳化,产生大量的颗粒杂质,由于先导级含有微米级精密阻尼孔,容易导致电液压力伺服阀堵塞造成压力失控,导致飞机无法刹车或者爆胎等严重的事故。
数字液压技术是液压技术的一个重要发展方向[8]。数字液压技术的定义为:用调制的离散数字信号直接控制离散流体系统,以实现对系统输出的主动智能控制[9]。数字阀实现方式是采用并联开关阀技术,开关阀是一种二值元件,只有开和关2种状态[10-11],开关阀已经得到了广泛的应用和研究,方洋等[12]对开关阀进行了建模分析,得到了影响开关阀性能的主要因素。数字阀的主要优势是对污染不敏感、鲁棒性高、容错能力强以及成本低[13]。但数字阀的应用也面临着许多挑战,其中实现高精度的控制就是要克服的重要难题[14-15]。
本研究针对飞机刹车需求,设计了一种基于离散数字液压的飞机刹车系统,对飞机刹车系统进行建模并搭建了刹车半实物仿真系统[16],提出了一种基于离散数字液压的防滑刹车算法,并在半实物仿真系统中进行了验证。
1 离散数字液压飞机刹车系统设计
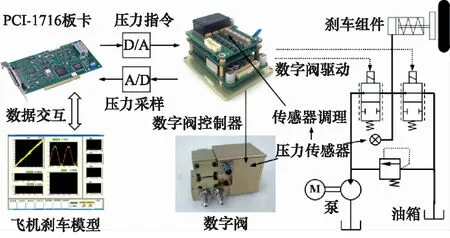
本研究所设计的离散数字飞机液压刹车系统如图1所示,由刹车控制器、数字阀控制器、数字阀、刹车作动器、刹车盘、机轮、压力传感器以及轮速传感器构成。
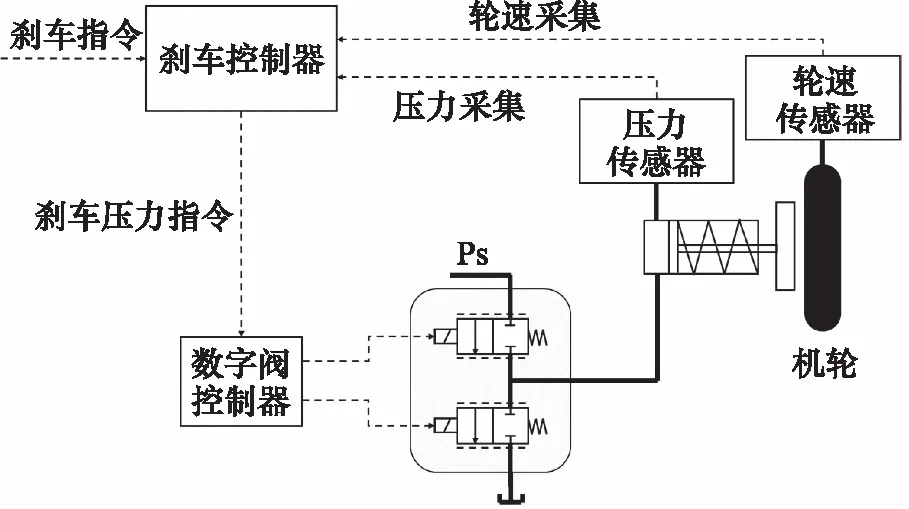
图1 离散数字液压防滑刹车系统框图
刹车控制器接收刹车指令、刹车压力反馈以及轮速反馈,经过防滑刹车算法计算发出刹车压力指令;根据刹车压力指令,数字阀控制器控制数字阀实现刹车压力调节;在刹车压力的作用下,刹车作动器挤压刹车盘动盘与静盘产生摩擦力矩,使机轮减速,从而实现飞机的制动。
本刹车系统中数字阀采用并联数字液压技术,由若干个高速开关阀并联构成高速开关阵列压力伺服阀,如图2所示。
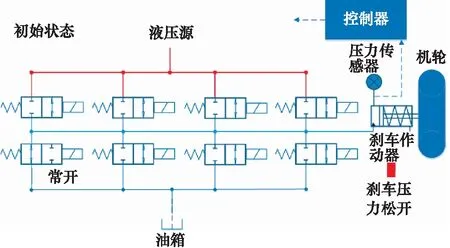
图2 高速开关阵列压力伺服阀原理
考虑到刹车系统高可靠性的要求,采用等值编码的形式组成开关阀阵列。开关阀阵列包括上游开关阀阵列和下游开关阀阵列,下游开关阀阵列中包含1个常开阀,可以保证在意外失电状态下刹车作动器无压力。
初始状态下所有阀都失电,刹车压力为0 MPa。需要升压时,首先将常开降压阀关闭,然后驱动上游开关阀阵列中的开关阀打开,连通液压源与作动器,使刹车压力升高。通过驱动不同数量的上游开关阀,实现不同速度的升压以应对各种工况。当压力调节至目标值时,只驱动常开阀使其关闭,此时刹车容腔不再有油流入和流出,压力维持恒定。需要降压时,常开阀依旧关闭,控制驱动下游开关阀的数量来控制降压的速度。
2 飞机刹车过程建模
飞机地面刹车系统建模主要需考虑飞机的受力过程以及机轮的受力分析两大部分。
2.1 飞机地面刹车过程建模
飞机在滑跑过程中受力如图3所示,飞机机体的动力学方程如下:
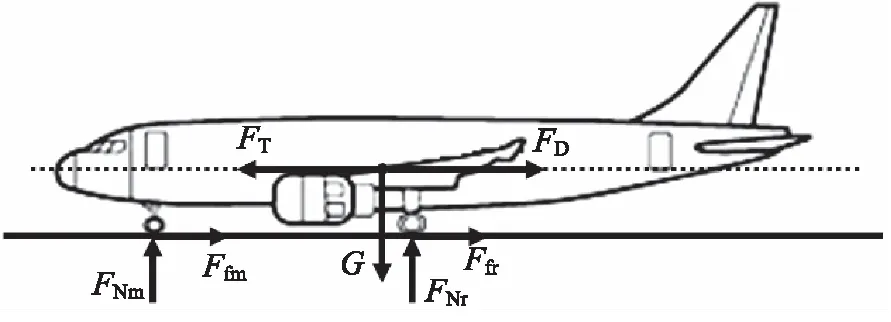
图3 飞机机体受力分析
(1)
图3中,m为飞机质量;v为飞机速度;FT为飞机推力;Ff为地面与飞机制动轮之间的结合力;FD=C2v2为飞机受到的空气阻力;C2为阻力系数。假设在刹车过程中,机体速度与机轮转动中心速度相同,即默认起落架不发生形变且相对位置固定,在制动过程中默认发动机不工作,即推力为0 N。假设3个机轮都起承重作用,机轮不存在侧向力和侧向加速度,其中2个轮起制动作用,且左右制动轮工况相同,则水平速度和受力的关系可简化为:
(2)
式中,Ffr为右制动轮所受摩擦力,机体在垂直方向的受力关系满足:
G=3FNr+Flift
(3)
式中,G为飞机重力;FNr为地面对右制动轮的支持力;Flift=C1v2为飞机受到的升力;C1为升力系数。
2.2 机轮动态模型
刹车压力通过作动器产生刹车力矩使机轮减速,进而使飞机减速刹停。刹车力矩与刹车压力的关系在刹车过程中是复杂非线性的,在此将其简化为:
Mb=Kbpb
(4)
式中,Mb为刹车力矩;Kb=npμpnhApRb是刹车压力增益系数,其中np为摩擦面个数,μp为摩擦系数,nh为刹车作动活塞个数,Ap为活塞面积,Rb为摩擦半径;pb为刹车压力。
摩擦系数μp与刹车盘温度有关,在刹车过程中刹车盘静盘与动盘摩擦,产生大量热量,导致刹车盘温度变化,进而影响摩擦系数μp。根据能量守恒建立刹车盘温度变化的动态方程:
(5)
式中,ω为机轮角速度;k为辐射系数;δ为斯特藩-玻尔兹曼常数;T和T0分别为刹车盘温度和环境温度;Xm为刹车盘质量;XC为刹车盘热容系数。
对机轮进行受力分析,如图4所示,以右制动轮为例,其动力学特性如下:
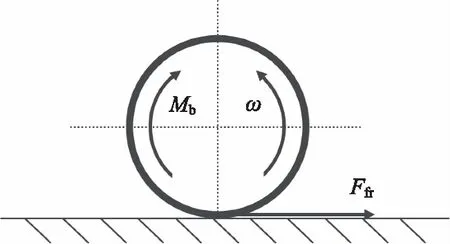
图4 机轮受力分析
(6)
式中,J为机轮转动惯量;R为机轮半径。
用滑移率λ描述机轮的运动状态,用结合力系数μ描述摩擦力和垂直载荷的关系:
(7)
(8)
结合系数μ是一种物理变量的非线性函数,可以用魔术公式做简化表示:
μ=D·sin[C·arctan(Bλ)]
(9)
式中,B为刚度系数;C为形状系数;D为峰值系数,不同路况下具有不同的参数,如表1所示,将参数代入即可得到不用路况的结合系数-滑移率曲线,如图5所示。
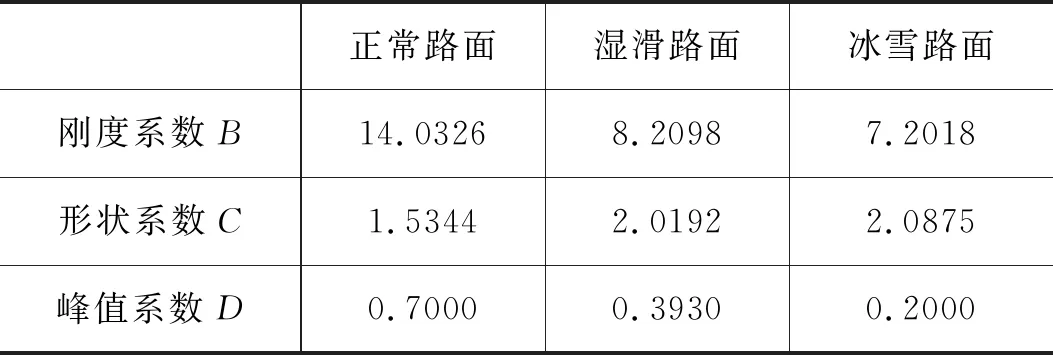
表1 不同路况下的参数
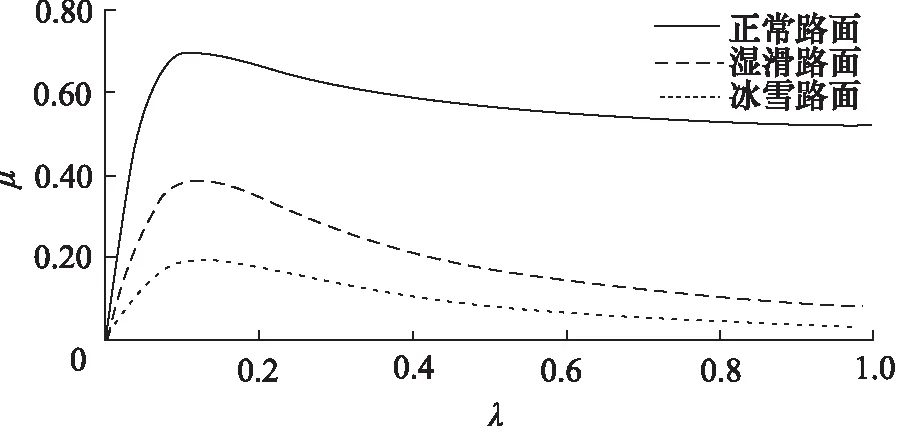
图5 结合系数与滑移率关系
3 离散数字液压防滑刹车算法
本研究提出了一种基于开关阀的最优滑移率刹车控制算法,由前文分析可知,跑道与轮胎之间的结合系数随着滑移率的增加先迅速升高之后缓慢下降。利用结合系数-滑移率的曲线斜率s进行分析:
(10)
显然,当s>0时,代表结合系数随滑移率的增加而增加;当s=0时,结合系数达到最大,此时可以实现最大摩擦力;当s<0时,结合系数随滑移率的增加而减小。
结合系数最大点对应的滑移率称为最优滑移率λop,当滑移率处于最优滑移率左侧时,刹车效率没有达到最佳,而当滑移率处于最优滑移率右侧时,结合系数下降将导致打滑现象。因此控制滑移率可以使飞机能够安全有效得刹车,为了最大化刹车效率,同时确保安全刹车,应当将目标滑移率设定在最优滑移率的附近并选择一个合理的工作区间ε,称为最优工作区间,如图6所示。当滑移率过大时,轮胎打滑,此时应当降低刹车压力,进而降低刹车力矩,使机轮运动中滚动所占的比例增加,滑动所占的比例减小,从而降低滑移率。当滑移率过小时,应当升高刹车压力,从而升高刹车力矩,增加滑移率。通过控制开关阀阵列调节刹车压力,使系统在最优工作区间工作,达到最优化防滑刹车。
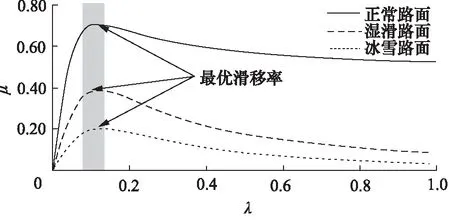
图6 最优滑移率区间
在刹车过程中,每个控制周期实时采集飞机速度以及机轮角速度,计算出滑移率λ,判断是否打滑,其算法流程图如图7所示。如果判断机轮还没有打滑,即:
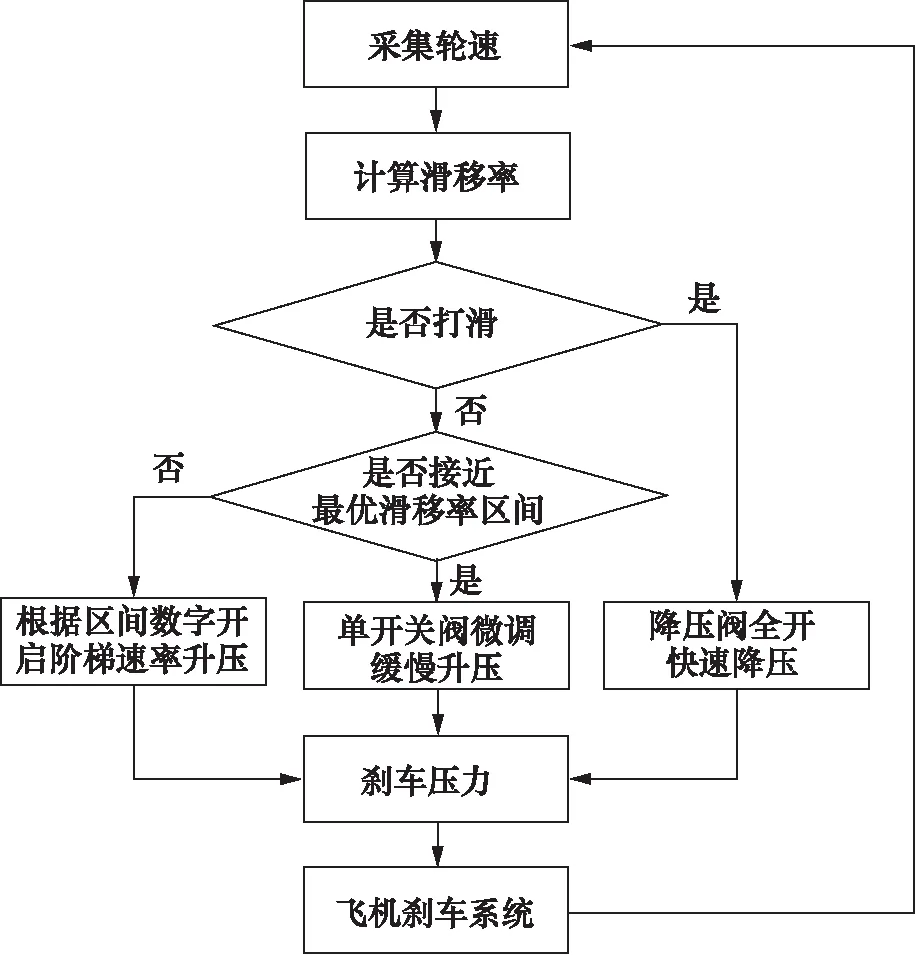
图7 算法流程图
λ<λop-ε
(11)
则可以增加压力提高刹车效率,这个过程又分为两种情况,第一种是距离最优工作区间还比较远,则压力可以快速提升,根据距离最优结合系数的差距,选择开启的开关阀数量,实现阶梯速率升压,可以表示为:
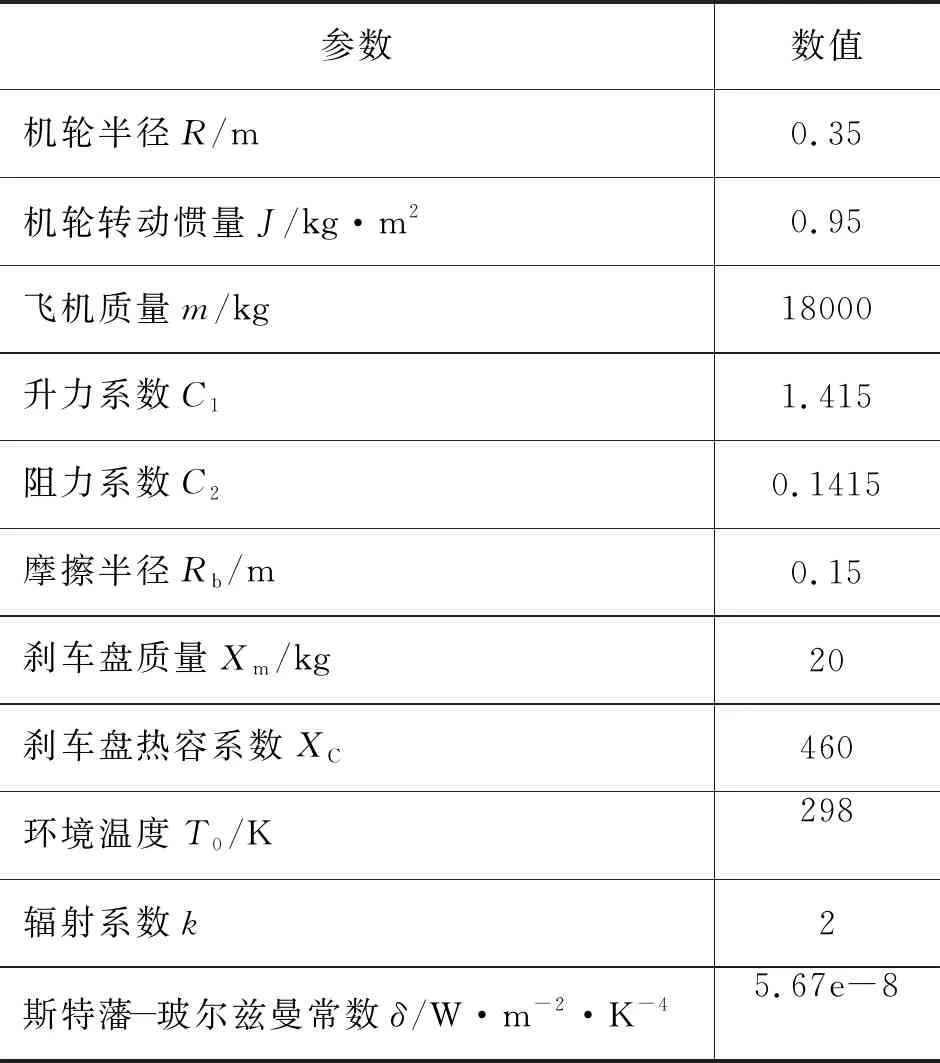
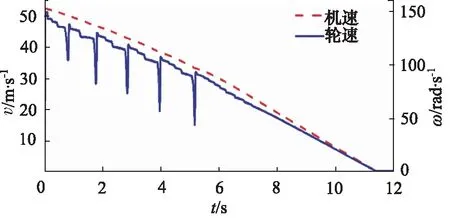
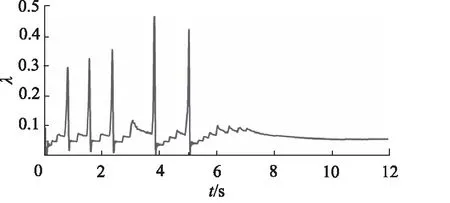
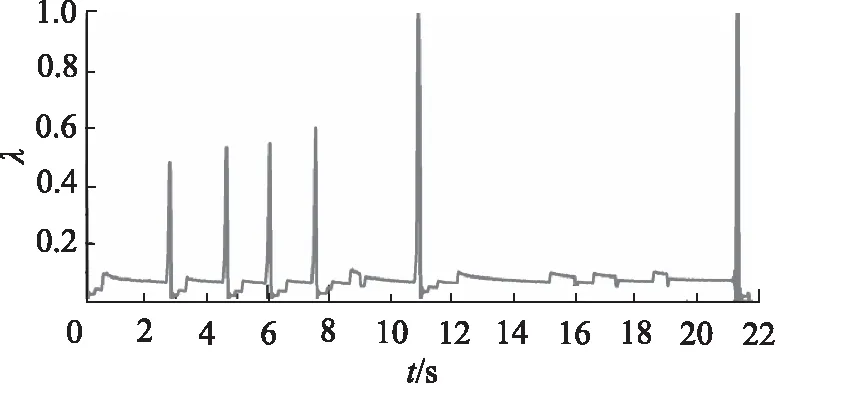
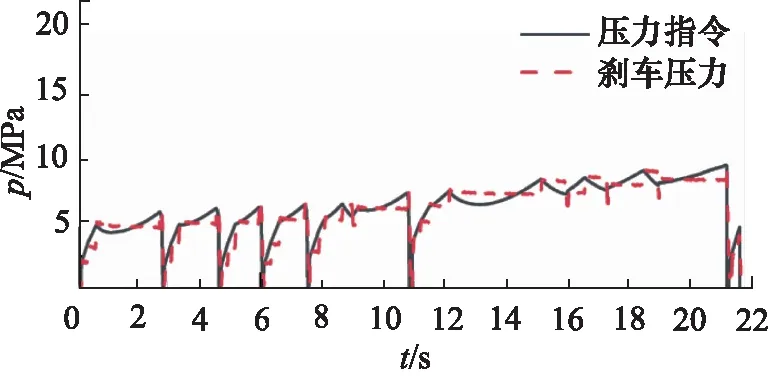
Nu=[f(s)],λ (12) 式中,Nu为升压开关阀数量;k∈(0,1)为辐射系数;f(s)是一个关于结合系数-滑移率曲线斜率s的关系函数,可以根据需求选取不同的关系函数。本研究中此函数选用一阶线性函数,即: f(s)=as+b (13) 第二种是在接近最优滑移率区间的时候,利用单开关阀采用占空比开启的方式进行流量的微调,实现压力的缓慢上升,趋近最优滑移率,即: Nu=1,k(λop-ε)<λ<(λop-ε) (14) 如果滑移率超出最优工作区间,则认为发生打滑,此时应当开启全部降压阀,迅速降低刹车压力,完成松刹,即: Nd=Ndmax,λ>(λop+ε) (15) 为了验证数字阀刹车系统,本研究建立了半实物仿真刹车系统,搭建的离散数字液压飞机刹车半实物仿真系统如图8所示。飞机和机轮模型采用实时数字仿真的方式实现,实时仿真系统为基于Windows的RTX实时系统。采用龙格库塔法求解微分方程组时,积分步长越短,求得解析值越精确,但同时也会增加运算量。综合考虑仿真结果的精确度和仿真系统的运算量,把积分步长定为RTX时钟周期的1/10,即RTX程序周期为0.0001 s时,龙格库塔积分步长为0.00001 s。在1个时钟周期内,用龙格库塔法进行10次求解,求解结果作为下一时刻飞机状态,从而完成对刹车过程的实时仿真。 图8 离散数字液压飞机刹车半实物仿真系统 数字刹车阀为实物系统。系统压力由紧凑型液压动力单元CytroPac提供,其功率为4 kW,流量可以达到16 L/min,压力可以达到24 MPa。刹车压力由数字阀进行控制,数字阀集成有一个压力传感器,能够实时采集刹车压力并将其反馈至数字阀控制器。数字阀控制器对压力信号进行调理,并将调理后的刹车压力通过A/D转换器传入PCI-1716板卡中,同时通过D/A转换器接收板卡输出的压力指令,利用压力指令和刹车压力进行计算,驱动数字阀实现压力伺服控制。PCI-1716板卡与RTX系统进行交互,实时更新模型输入,RTX系统进行运算求解并将求解值输出至PCI-1716板卡。 基于所建立的RTX实时仿真模型,在表2所示参数下,针对不同路面工况进行了实时仿真。 表2 飞机仿真模型参数 正常路面下跑道较为干燥,与轮胎之间结合系数较大,飞机可以更有效地刹停。正常路面时,设飞机初始速度为52 m/s,刹车过程中飞机速度v与机轮角速度ω曲线如图9所示,滑移率曲线如图10所示。可以看出,在干跑道刹车过程中,发生数次浅打滑,并且在打滑之后能够迅速恢复,防止深打滑以及轮胎抱死。 图9 正常路面机速和轮速曲线 图10 正常路面滑移率曲线 正常路面刹车过程中压力跟随曲线如图11所示,可以看出,在每次打滑时,刹车压力迅速下降,打滑状态恢复后刹车压力缓慢上升,最终达到最高刹车压力15 MPa。 图11 正常路面压力跟随曲线 根据仿真结果计算分析,刹车时间为11.13 s,刹车距离为324.51 m,平均减速率能够达到4.58 m/s2,飞机可以快速刹停。 改变魔术方程系数模拟不同的路况,在不同的路况下进行了刹车仿真。湿滑路面刹车仿真结果如图12~图14所示,由于结合系数较低,湿滑路面比正常路面打滑频率更高。湿滑路面下刹车时间为21.67 s,刹车距离为643.38 m,平均减速率为2.35 m/s2,防滑效果有所下降,应适当降低刹车压力。 图12 湿滑路面机速和轮速曲线 图13 湿滑路面滑移率曲线 图14 湿滑路面压力跟随曲线 设计了基于离散数字液压的飞机刹车系统,并对所设计的系统进行了建模,搭建了飞机刹车半实物仿真系统。提出了一种基于离散数字液压的高效防滑刹车算法,针对不同路况进行了刹车仿真。通过对仿真结果的分析, 发现提出的防滑刹车算法能够有效防止机轮打滑及抱死现象,提高了刹车效率。4 半实物仿真验证
4.1 正常路面刹车仿真

4.2 湿滑路面刹车仿真

5 结论
