仿昆虫多扑翼飞行器翼的优化设计
2022-01-14余杰
余 杰
(中国飞行试验研究院,陕西 西安710089)
在微型化无人机的发展历程中,扑翼飞行器凭借其较高的机动性、可垂直起降、可悬停和仿生等优势,在军事领域获得了广泛的关注。自然界中的鸟类和昆虫均是靠扑动翅膀飞行,其中鸟类飞行时翅翼的拍动平面基本与飞行平面垂直,拍动频率低且拍动产生的气动力分量大部分向后,从而产生前进速度,迫使气流流过翼翅表面产生升力;昆虫飞行时翅膀的拍动平面基本平行于飞行平面,拍动频率高且气动力分量大部分向上,与旋翼飞机类似[1]。此外,鸟类依靠自身尾翼进行方向控制,而多数昆虫没有尾翼,依靠改变翅膀的运动状态进行控制,因此自然界的昆虫多可进行悬停飞行,而多数鸟类则不行。
由于自然界鸟类和昆虫气动实现方式不同,故基于仿生理念发展的扑翼飞行器出现了仿鸟式扑翼飞行器和仿昆虫式扑翼飞行器。其中仿昆虫式扑翼飞行器能够实现自由悬停,机动性较高,能适应多种飞行环境,但是没有尾翼的结构为其控制系统的实现带来较大难度[2]。2018年代尔夫特大学研制出具有四个扑翼的“DelFly Nimble”飞行器,成功将“多扑翼飞行器”的设计理念带入大众视野[3]。在此基础上本文利用数值计算与实验验证的方法对仿昆虫多扑翼微型飞行器的传动与气动系统进行设计验证与评估,探究气动效率较高的设计方案。
1 仿生扑翼的几何模型与运动模型
1.1 几何模型
在扑翼飞行器的翼面设计中,扑翼根部与支撑杆件固连,翼面则沿展长方向逐渐扭转变形产生攻角[4]。在扑翼的制作过程中,以翼面与翼根粘接偏角的方法控制翼面紧绷与松弛程度可以间接控制拍动攻角[5],因此扑翼飞行器翼面的运动攻角在安装时就已确定。不同扑翼飞行器由于布局形式、翼面形状和运动机构的不同,该运动攻角的设计值也不同。实际中为获得气动效率最高的攻角设计值,通常需要大量实验测试,因此本文使用数值计算的方法分析多扑翼飞行器攻角对气动力的影响规律。
工程设计上无法对翼的翼面形状、翅脉、羽毛分布等等因素进行准确模仿,因此研究时需要进行适当的简化,将其按照刚性平板翼进行计算,通过将其运动分解为拍动和翻转两个部分来模拟其整体运动过程。先基于DELFLY 的扑翼模将平板翼的矩形形状改进为如图1 所示的多边形,弦长由翼尖至翼根逐渐线性增加,至翼根附近保持弦长不变。扑翼的参数见表1。
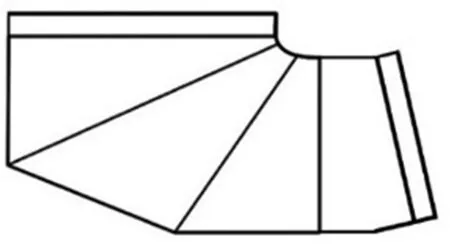
图1 扑翼翼面形状
表1 扑翼几何参数
1.2 运动模型
自然界中昆虫翅膀的运动较为复杂,Ellington[6]等人通过对昆虫运动状态的观察,将翅翼的拍动运动简化为正弦函数,在一个拍动周期中,中间位置拍动速度最大,两侧极限位置拍动速度为零,角速度最大。如图2所示,翅翼向下拍动时,翼面与拍动平面形成夹角,产生升力;翅翼向上拍动时,翼面主动翻转,此时上下翼面互换,攻角保持不变,故能产生相同的升力。扑翼飞行器的翼面运动与蜂鸟翼翅运动规律类似,但在数值仿真中需要进行简化。本文采用简化的刚性翼模型,忽略昆虫翅膀运动过程中的扭转和变形,将翼的运动分解为拍动和绕前缘翻转两个部分。拍动过程使用拍动角Φ 来描述,翼的拍动角随时间变化规律可用三角函数来描述:
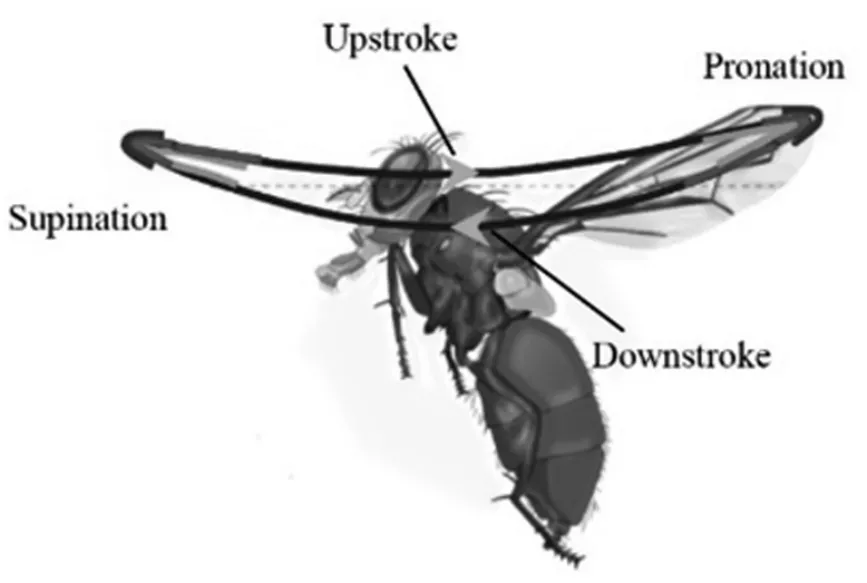
图2 昆虫翅翼拍动轨迹

其中:Φmax和Φmin分别是拍动平面绕OZ 轴转动时与OY轴正向夹角的最大值和最小值,n 是拍动频率。令,Φf=Φmax-Φmin,将式(1)整理得:

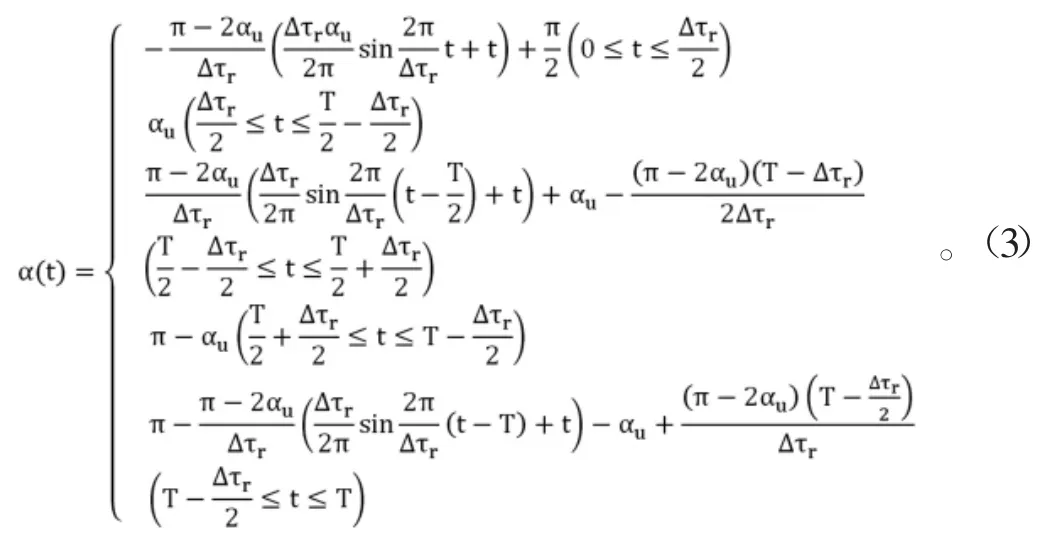
绕前缘的翻转过程使用迎角α 来描述,一个周期内在翼上拍和下拍的极限位置处会发生两次翻转,其余位置迎角基本不变。两次翻转需要的时间相等,在一个周期内的占比均为△τr。而在上拍和下拍的平拍阶段,扑翼迎角α 保持不变,分别为αu和αd,本文中二者相等。基于此,扑翼拍动过程中攻角角度的关系式见式(3)。
将上述扑翼的拍动运动和翻转运动投影在惯性系下,则可得到表达式:

使用高速摄像机拍摄一对翼展为8.5cm,展弦比为1.8 的扑翼在电机输出功率为7.8W 时的拍动状态,根据相对位置关系测量求解可得扑翼拍动幅度Φf为107°,拍动频率n 为24Hz,拍动攻角α 为31°,翻转时间△τr为0.2s。扑翼在一个周期内拍动角和攻角的变化见图3 所示。
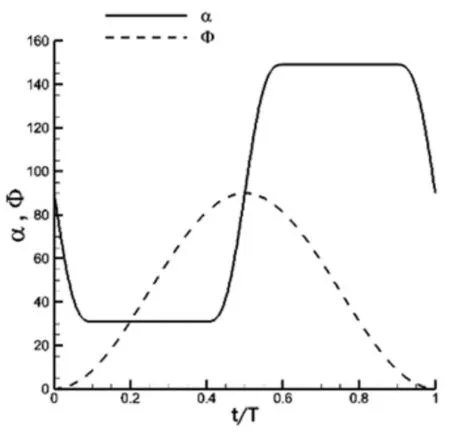
图3 一个周期内扑翼拍动角和攻角变化示意图
2 扑翼飞行器数值计算
2.1 重叠网格模型
本文使用商业软件ANSYS Fluent 对扑翼运动过程中的气动特性进行数值模拟,扑翼的运动方程由UDF 给出。扑翼的三维机翼在厚度方向尺寸极小,因此可将其看作薄板模型,厚度方向尺寸约为展长的2%~3%。由于仿真时需要求解带运动的扑翼瞬态问题,本文选取基于重叠网格的分区混合型网格模型。在网格上的具体划分如图4 所示。
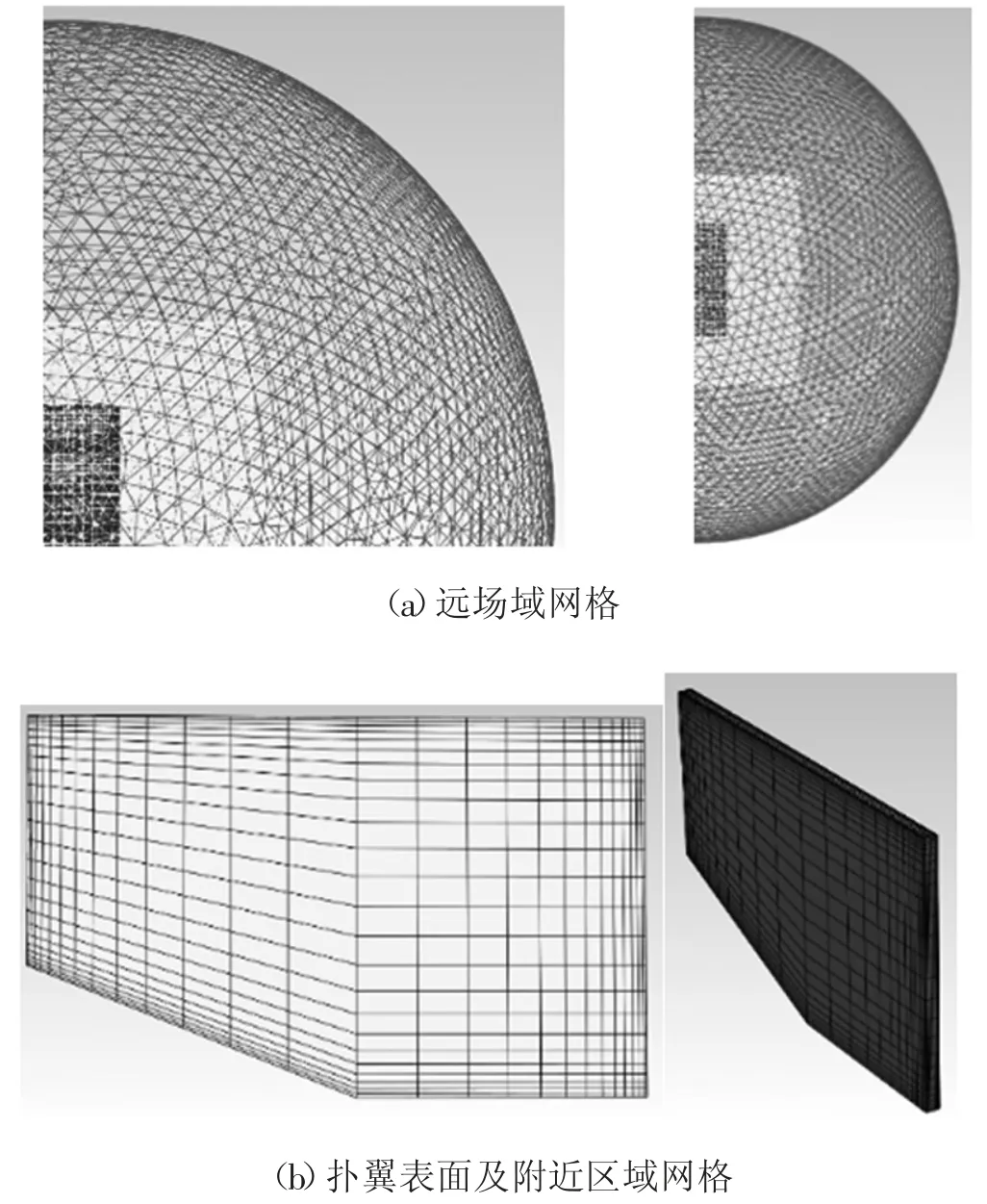
图4 扑翼网格划分示意图
首先在扑翼周围建立圆柱形流场区域并建立结构网格作为计算流场,在扑翼的横截面方向结构网格的边界距离翼面约5 倍弦长,在扑翼展向方向结构网格区域长度约为扑翼展长的3 倍;之后在扑翼的外侧划分出能包含所有圆柱形扑翼流场完整运动的矩形区域并重叠网格;计算流场外直至远场部分自动生成非结构网格。通过分层网格处理,仿真时既能计算复杂瞬态运动问题,又能在很大程度上保证求解结果的准确度。扑翼流场问题求解中通常在δ 的范围内布置10 层网格,δ 的大小由式(5)给出:

式中:l 为扑翼的平均气动弦长,u 为参考速度,其值为u=2Φrn。其中:Φ 为扑翼拍动范围,r 为扑翼二阶矩,n 为扑翼拍动频率。据此求得δ≈0.0083,故第一层网格厚度可设置为0.0004。
2.2 悬停状态下攻角对气动特性的影响
扑翼拍动问题的网格无关性验证方法在相关文章[7]中已有详细描述,本文共选取了网格密度、远场边界和计算时间步长三个方面进行验证,观察无量纲量平均升力系数L、平均俯仰力矩系数M、x 和y 方向的平均阻力系数Dx和Dy的变化规律。验证结果表明本算例在数值计算时应采用55 万网格密度、40 倍远场大小、0.005T 时间步长作为网格模型与求解条件,以同时保证计算精度和计算效率。经过上文所述的求解条件设置及网格生成方法,最终求得不同拍动攻角下扑翼的升力系数与阻力系数如表2 所示。
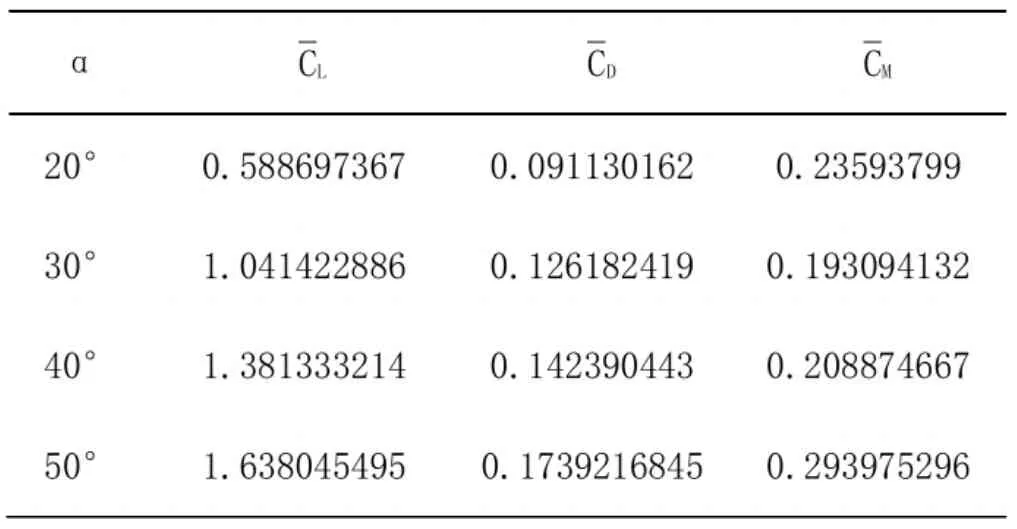
表2 攻角对悬停气动特性的影响
由表2 可知,扑翼攻角从20°增大至50°的过程中,平均升力系数不断增加,但增幅逐渐放缓;平均阻力系数和平均力矩系数也在不断增大,但在40°增大至50°的过程中有明显增幅,在40°附近升阻比最大。为了使扑翼获得更大升力,应使平均升力尽可能大,但增大至一定幅度后其带来的收益逐渐降低。基于此,本文综合选取40°作为扑翼设计攻角。
3 扑翼飞行器翼的优化实验
扑翼的实际拍动过程较为复杂,共涉及扑翼绕翼根的拍动、翼面绕前缘的翻转和翼面的柔性变形三个运动,其中翼面柔性变形的运动难以在数值计算中准确模拟[8]。此外,扑翼的气动效率还受扑翼制作时的薄膜厚度、碳杆布置位置、扑翼安装方式等诸多因素影响。为了探究这些因素对扑翼气动特性的影响,本部分内容将首先介绍仿生扑翼的实物制作方法,之后通过控制变量的实验方法进行验证。
3.1 仿生扑翼的制作
仿生扑翼由柔性薄膜与碳杆组合而成,柔性薄膜构成翼面,碳杆排列成翅脉。其中主梁和根部碳杆由直径1mm 的碳杆组成,翅脉由直径0.5mm 的碳杆组成,柔性塑料膜为厚度0.5mm 的聚酰亚胺薄膜,碳杆和薄膜之间通过胶水粘连在一起。由于扑翼全程通过手工制作,为了保证可重复性,制作时应主要留意以下三个影响因素,尽量避免人工误差对扑翼带来的影响:
3.1.1 翼面形状
扑翼翼面由一张较大薄膜手工裁剪而成,因此往往存在手工误差使得翼面积不同,最终影响升力的大小。
3.1.2 胶水
碳杆和翼面的粘连靠涂抹胶水实现,而胶水的用量不同则会影响扑翼的重量,从而影响其运动时候的惯性功耗。
3.1.3 碳杆粘连的准确度
碳杆与翼面粘连位置的准确度对翼面张紧力有直接影响,继而会影响到扑翼运动时的惯性功耗和可以产生的升力大小。
3.2 优化实验
3.2.1 不同翼展对气动特性的影响
保持翼面形状不变增大翼展,则翼面积也会随之增加,较大的翼面积一方面会产生更大的气动力,另一方面会带来更大的惯性力。实际中受限于电机、电池等动力系统,过大的翼面积可能造成气动载荷过大,拍动频率降低,最终导致气动力反而降低。本文测试了不同翼展对扑翼气动特性的影响如图5 所示。观察可知,在相同电压下,升力与翼展基本成正相关;相同功率下,8.5mm 翼展可产生的升力最高,其效率也最高。因此本文最终选取8.5mm 作为多扑翼飞行器扑翼的翼展。
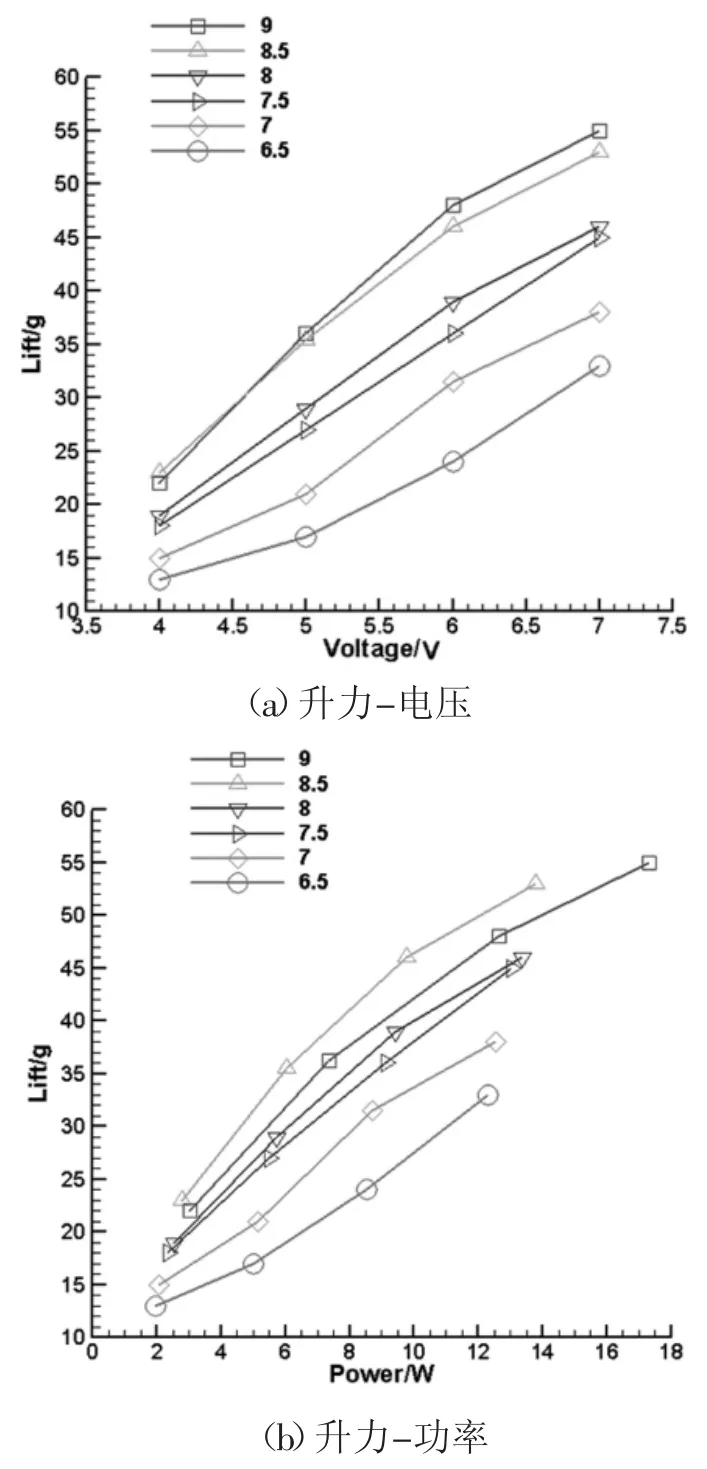
图5 不同翼展气动特性对比
3.2.2 不同薄膜厚度对气动特性的影响
不同薄膜厚度通过影响扑翼重量、拍动攻角、翼面柔性变形等从而影响气动升力大小,本文选取了0.25mm、0.5mm 和0.75mm 三种不同厚度的聚酰亚胺薄膜制作扑翼,继而探究其对气动升力的影响,结果如下。
由图6 可知,0.075mm 的薄膜重量较大,且翼面柔性不够,气动效率最低;0.025mm 和0.05mm 相比,1.6W 以下时0.05mm 厚度扑翼效率更高,1.6W 以上时0.025mm 厚度扑翼效率更高。考虑到实际应用时0.025mm 的薄膜翼由于厚度较小在高频运动时进场发生翼膜破裂的情况,最终选用0.05mm 的聚酰亚胺薄膜作为制作扑翼的材料。
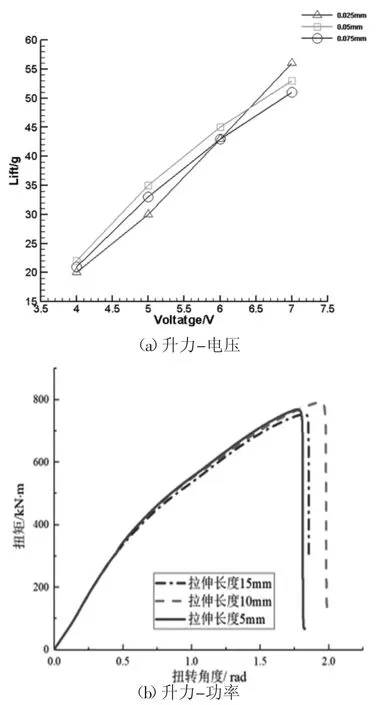
图6 不同薄膜厚度气动特性对比
3.2.3 不同扑翼安装方式对气动特性的影响
扑翼薄膜与主梁间的不同安装方式将会影响扑翼绕前缘翻转的容易度,从而影响到拍动时的扑翼攻角。为了使得翼面的翻转过程更平滑,摩擦阻力更小,本文探究了一种新型扑翼安装方式(简称为袖筒式),即为将翼面与前缘相连的部分粘出一个圆筒,将主梁套入圆筒中,如图7 所示,这种安装方式可以实现扑翼翼面与主梁间的自由翻转,使扑翼在高速拍动过程中更容易产生柔性变形。通过实验测试结果(见图8)表明,该方法与将翼面与主梁完全粘死的传统方法相比拥有更好的气动特性。
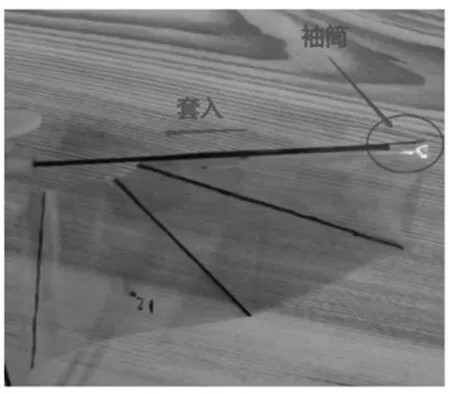
图7 袖筒式安装方式
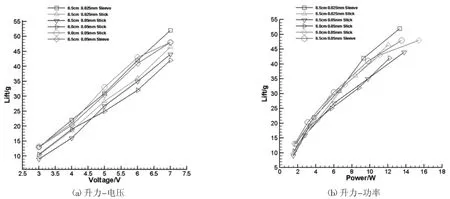
图8 不同扑翼安装方式气动特性对比
3.3 优化结果分析
通过仿真与实验手段,本文确定了多扑翼飞行器的翼面关键参数,确定了不同材料和安装方法对气动特性的影响,最终制作完成的扑翼运动时高速摄像结果如图9。从高速摄像结果可以看出,平拍阶段翼面发生理想的柔性变形并维持一定的有效攻角拍动,在上拍结束、下拍开始的翻转阶段扑翼翼面在前缘的带动下先贴合再逐渐分开。最终制作出的扑翼在额定工作状态(7V,26Hz)可以产生48g 有效升力,气动升力功耗约为4.3g/W,满足设计状态(起飞重量60g,拍动频率24Hz)的起飞需求。
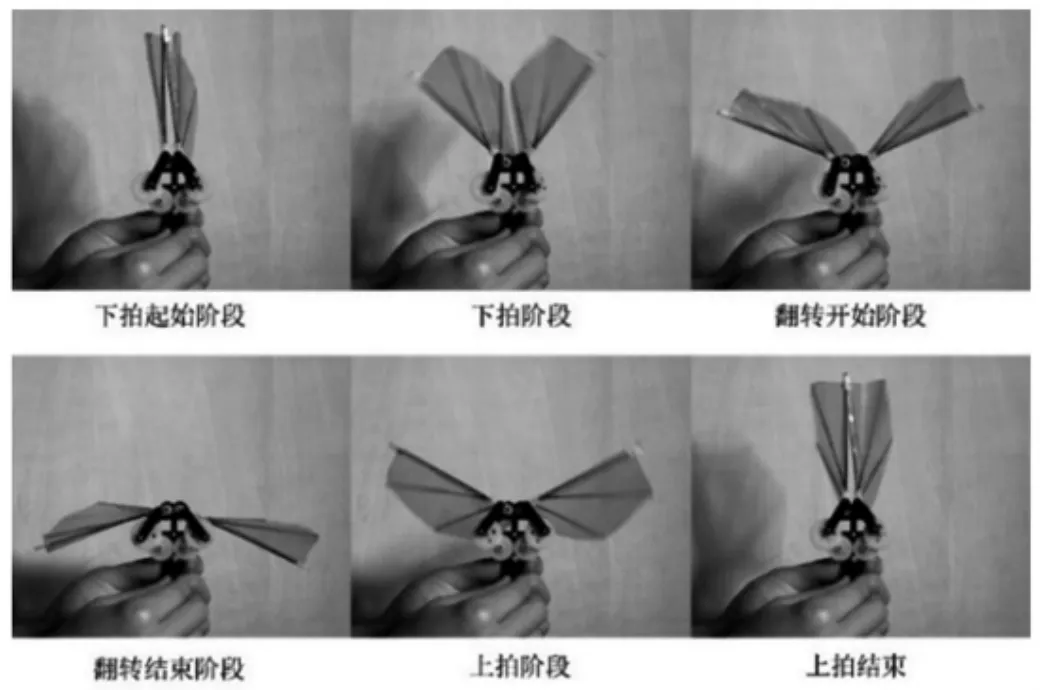
图9 扑翼一个周期的拍动示意图
4 结束语
本文对扑翼的翼面形状进行简化并得到扑翼的几何模型,根据自然界昆虫飞行时翅膀的拍动规律简化得到扑翼的运动模型,针对高频运动扑翼的气动仿真计算使用了重叠网格模型,在此基础上计算出悬停时不同攻角下气动特性的变化规律。此外,还通过实验手段探究了扑翼制作安装过程中部分因素对气动效率的影响,确定了气动效率较高的扑翼制作方案。该方案已在实验室的扑翼飞行器中成功应用并完成室外飞行,可为其他扑翼类飞行器翼的设计提供经验。
