基于一致性理论的卫星太阳能帆板分布式振动控制
2021-12-31周威亚邬树楠王恩美
周威亚,邬树楠,王恩美
(大连理工大学航空航天学院,大连 116024)
随着空间任务的复杂程度不断提高,卫星太阳能帆板、星载天线等的结构尺寸逐渐朝着轻量化、大型化和模块化的方向发展,呈现的柔性特征更为明显。卫星在进行轨道机动或者姿态调整时会激发太阳能帆板的振动;此外,受到空间摄动的影响,帆板也可能产生挠性振动。振动发生后很难自行衰减,会对卫星本体的控制产生较大的影响。因此,需要对太阳能帆板进行主动振动控制。
近年来,国内外很多学者都针对空间柔性结构的振动控制问题开展了研究。Wang等[1]利用线性二次型调节控制器实现了对压电智能梁结构的振动控制。Luo等[2]采用比例微分(Proportional derivative,PD)控制完成了大型桁架结构的振动控制。钟美法等[3]在线性二次最优控制器的Riccati方程求解中引入精细积分法,并通过抑制压电层合板的振动分析该方法的有效性。邱志成等[4]基于自适应RBF模糊神经网络控制算法实现了对带有铰接的挠性附件的振动控制。袁秋帆等[5]以低基频挠性附件为研究对象,基于正位置反馈控制原理,设计了太阳帆板振动控制系统。黄永安等[6]针对具有参数不确定性以及受到随机扰动的柔性结构,将神经网络与滑模控制结合,设计了神经网络滑模振动控制方法。苗双全等[7]提出了一种输入成形与自适应滑模控制结合的控制算法,实现了对挠性航天器姿态机动过程中残余振动的抑制。Hu等[8]以空间大型柔性悬臂结构的振动问题为研究背景,设计了自适应控制算法。余臻等[9]提出了一种基于期望补偿的自适应鲁棒主动控制方法,抑制了挠性航天器机动过程中挠性附件产生的振动。以上控制方案均属于集中式控制,无论采用经典控制算法还是现代控制理论,都是将整个结构振动控制的信息一起存入一个中央控制器中处理。虽然能取得较好的控制效果,但系统对于控制器故障的鲁棒性较差。此外控制器求解计算的效率会随着自由度数量的增加而下降。随着像空间太阳能发电卫星等新任务的出现,太阳能帆板的结构尺寸能够达到数百米,需要数量众多的传感器和执行机构来完成控制任务,这会导致系统庞大且复杂[10-11]。
为了提高集中式控制器求解效率,常采用模态截断来减小系统维数,但这也存在观测溢出等问题。若能将太阳能帆板的振动控制系统“化整为零”分解为多个子系统并各自独立控制,则不失为一条新的有效途径。这即为分散式振动控制。与集中式振动控制相比,分散式控制将高维大系统分解成多个低维子系统,实现了对系统的降维。各分散振动控制器只需要帆板结构的局部信息而不需要全部信息,因此能够降低信息处理量、提高求解计算效率。当某个子系统控制器出现故障时,不会影响其他控制器的正常工作,控制系统将更加可靠。此外,采用分散式控制使系统具备良好的扩展性,适用于大型帆板、天线等的在轨装配。目前已有学者开展了相关的研究,Huang等[12]研究了分散化滑模控制方法,实现了大型挠性附件的振动控制。Hu等[13]将大型空间结构划分成相互连接的子结构,设计了一种仅利用子结构局部反馈信息的简单分散自适应控制方法,实现了大型空间结构的振动抑制。文献[14-16]系统地介绍了大型空间结构的分散式控制策略。通过设计的分散化自适应模糊控制方法完成了空间智能桁架、空间薄膜结构的主动振动控制;通过设计的分散式鲁棒控制策略实现了航天器太阳能电池板的主动振动控制,并通过实验验证了分散控制方法的有效性。上述分散式振动控制存在较多优势,但设计各控制器时只使用帆板结构的局部信息,子结构之间的相互作用对系统全局性能的影响是通过调整各控制器的控制增益来处理的。这对处于物理上固定连接的太阳能帆板各子结构之间的相互作用影响而言是一种被动适应的方法。
在分散式控制器设计过程中进一步考虑子结构之间的信息交互,使子结构的受控运动能够相互协同,则会优化全局控制效果并提高系统对故障的鲁棒容错能力。这种方法被称为分布式控制或局部分散式控制[17-18]。Omidi等[19]基于模 态坐标提出了悬臂挠性板结构的分布式协同积分谐振控制方法,并给出了数值结果。相比没有考虑协同交互的完全分散式控制,该方法表现出更好的控制效果。Sun等[20]设计了模态观测器和分布式积分一致性控制器实现太阳能帆板的振动控制。王恩美等[21]基于有限元模型设计了结合卡尔曼滤波的分布式线性二次调节器(Linear quadratic regulator,LQR)振动控制器,在求解效果和鲁棒容错性能等方面通过数值仿真和集中式控制进行了对比分析。目前对于柔性空间结构的分布式主动振动控制方法的研究仍然处于起步阶段,上述研究在控制系统的设计与理论分析上还存在不足。在分布式控制协同交互项的设计上没有给出明确的协议或准则。此外,目前还缺乏对于部分控制器失效情况下的分布式振动控制的理论研究。
针对上述问题,本文提出基于一致性理论的卫星太阳能帆板分布式振动控制方法。根据智能组件的定义建立面向分布式控制的卫星太阳能帆板动力学模型;结合图论和一致性理论设计分布式控制器,并对部分控制器失效的情况进行了理论分析。所设计的分布式振动控制器包含反馈镇定项和一致性协同项,会显著提高系统的动态性能和鲁棒容错能力。最后给出不同的算例仿真,验证所提方法的有效性。
1 卫星太阳能帆板的动力学建模
以卫星太阳能帆板为研究对象,假设帆板由模块化的单元结构组成,忽略之间的连接部件。本文假定帆板展开后为刚性锁定,并认为在振动控制时卫星不作姿态机动。此时,可将帆板视作悬臂板结构进行动力学建模[22]。分布式控制思想是将整体系统分为多个分系统进行独立控制,并通过各独立控制器之间的信息交互实现整体系统的协同控制。因此,首先要建立卫星太阳能帆板的面向分布式控制的动力学模型。借鉴多智能体控制的思想,在考虑帆板模块连接的基础上,根据有限数量的敏感器和作动器将内在固结的太阳能帆板划分为多个可独立控制的子结构;各子结构之间视为链式连接且不包含重叠区域;每个子结构包含一个或多个模块化的帆板单元结构,配置用于主动控制的敏感器、作动器和控制器;子结构中布置的作动器通过输出力或者力矩来抑制帆板产生的振动。同时给出用于建立模型的Oxyz坐标系如图1所示。这样的子结构是基于分布式控制思想而提出的可控结构单元,具备独立感知、计算和执行的能力,子结构之间是物理连接的,而非仅通信连接。文献[23]中称其为智能组件。

图1 卫星太阳能帆板简化模型Fig.1 Simplified model of satellite solar panel
根据上述定义,采用4节点板单元建立帆板结构的有限元模型。研究中通过理论计算得到单元结构的刚度阵、质量阵。通过组装得到第i个智能组件的刚度阵和质量阵。考虑阻尼效应,帆板第i个智能组件的动力学方程可表示为

式中:xi为第i个智能组件的节点位移向量;Mi、Ci、Ki分别表示第i个智能组件的质量矩阵、阻尼矩阵和刚度矩阵,结构阻尼采用瑞利阻尼假设;Bi为第i个智能组件控制器的位置矩阵;ui为控制输入。将得到的智能组件的质量阵、阻尼阵、刚度阵进行组装可以得到整体结构的质量阵、阻尼阵、刚度阵。整体结构的动力学方程可表示为

式中:M、C、K分别表示太阳能帆板整体结构的质量矩阵、阻尼矩阵和刚度矩阵;X为整体结构的节点位移向量;B为整体结构控制器的位置矩阵;U为整体结构的控制输入。
2 分布式振动控制系统设计
与分散控制的各自独立工作相比,若各智能组件之间能相互协同则可以更有效地实现振动控制任务,而一致性算法则是分布式控制中的一种有效的协同机制。本节给出基于一致性理论的分布式振动控制系统设计过程及系统的稳定性分析。
2.1 控制器设计中的图论基础
在分布式振动控制系统中,采用图论的基本理论来描述智能组件之间的连接关系,并在此基础上设计各控制器中的一致性协同项[24]。图是由顶点和连接顶点的边所构成的集合,记为Γ={γ,φ,δ},其中γ={γ1,γ2,…,γn}表示所有顶点的集合,边集φ⊆γ×γ表示连接各顶点的边的集合。δ称为邻接关系矩阵

如果顶点j有一条边指向顶点i,则有δij=1,否则δij=0,且认为顶点与自身不存在联系。当δij=δji时,系统称为无向图;反之则为有向图。
在航天器或机器人等编队运动控制中,常将每个航天器或机器人当作一个顶点,用上述的拓扑图来描述航天器或机器人之间的感知与通信连接关系。在本文的研究对象或其他大型空间结构中,各智能组件间存在结构上的连接。因此,可以认为其拓扑图是固定的,是依据各智能组件上的连接关系确定的。这样的设计是从结构特点的角度出发,而非仅考虑各控制节点的感知与通信关系。若为了提高闭环系统的鲁棒性,则可以根据不同工况或任务改变拓扑图以实现控制目标。
2.2 控制器设计中的一致性理论基础
一致性是指通过设计合理的分布式控制协议,使得系统中的多个成员就某些关键的量趋于一致。一致性协议表示了系统中各个成员之间的信息传递和交换的过程。而这种信息交换则是分布式协同控制的中心问题。


2.3 分布式协同控制器设计
对于卫星太阳能帆板的分布式振动控制而言,采用多个作动器/传感器进行主动控制时,保证不同位置的作动器输出力之间的一致性十分重要。不同位置的作动器的输出应该具有相位一致性,即同相位或者反相位,否则会相互影响导致控制效果变差。若将每个智能组件看作图中的一个顶点,将不同组件的连接或通信关系当作边,则帆板的各智能组件之间的关系可以被作为一个图,以便于研究其分布式振动控制问题。依据帆板的结构特点,将各智能组件模块之间连接关系的拓扑图设为直线型的连通图;同时考虑到帆板结构的敏感器和作动器多采用布线方式进行安装,采用双向通信对各智能组件的通信影响较小。因此,将文中的智能组件的控制器分为3种:(1)仅右端含有一致性协同信息的控制器;(2)左、右两端均含有一致性协同信息的控制器;(3)仅左端含有一致性协同信息的控制器(图2)。
根据上述定义,同时考虑到实际工程应用中采用测量信息进行控制器设计,本文将卫星太阳能帆板的分布式控制中的一致性协同控制器设计准则定义为

式中:yi和ẏi表示智能组件状态的测量信息;δa和δb分别表示位移和速度一致性项的邻接关系矩阵。在此基础上,提出分布式协同控制器为

式中:k12和kn,n-1分 别表示第1种 和第3种 智 能组件控制器中的增益,ki,i-1=ki,i+1(i=2,…,n-1)表示第2种智能组件控制器中的增益;u1和un分别表示帆板左端和右端的智能组件控制器;ui表示帆板中间智能组件控制器。则整体结构控制器可表示为



2.4 系统稳定性分析
为了分析系统的稳定性,选取如下所示的Lyapunov函数

式中M、K为正定矩阵。对V1求一阶导可得

由式(2)可知

将式(11)代入式(10)可得

将控制器式(7)代入式(12)后可得
令增益满足Kp=K*α-K*δ,则有

式中C为正定的结构阻尼矩阵,则只需令矩阵Kd+K*(δ-α)为半负定。因δ和α已知,Kd和K*为控制器的增益系数矩阵,令其均为对角阵,则存在可设计的参数kdi和k*i使得式(15)成立

式中:kdi为Kd的对角线元素;λi为矩阵δ-α的特征 值。因 此,矩 阵Kd+K*δ-K*α半 负 定,则<0,闭环系统渐近稳定,控制器中所有增益满足上述设计约束条件即可。
2.5 控制器部分失效时的鲁棒稳定性
分布式控制器式(7)包含反馈镇定项和一致性协同项两部分;当不考虑协同项时,则变为如下形式的分散式控制器

即仅根据每个智能组件的位移和速度来设计控制器,并不考虑不同组件间的交互关系。因此,也可以认为分布式控制器式(7)包含分散式控制器式(16)和一致性协同项两部分。
采用式(16)所示的分散式控制器抑制太阳能帆板振动时,若某个或多个控制器失效则对应位置的控制力为0。这会影响控制效果,严重时可能无法实现对振动的有效抑制。而采用分布式控制器式(7)则能避免这个问题。这是由于控制器中还包含考虑不同智能组件信息交互的协同项,使得在某些分散式控制器失效的位置还会有控制力输出。不妨假设式(7)中无反馈镇定项(亦即分散式控制项输出为0),则分布式控制器变为

选取如下Lyapunov函数

式 中M、K为 正 定 矩 阵。要 使V2>0,只 需XT(BK*αCy-BK*δCy)X≥0,即 矩 阵K*α-K*δ半正定。令

则 矩 阵K+BK*αCy-BK*δCy正 定,即V2>0。对V2求一阶导可得

将式(11)代入式(20)中可得

将控制器式(17)代入式(21)可得

式(22)代入式(19)可以得到V̇2<0。因此控制器部分失效时闭环系统渐近稳定,且需满足上述控制器的设计条件。
注释1如式(7)所示的分布式控制器包含反馈镇定项和一致性协同项两部分,其中反馈镇定项的设计采用了有代表性的比例-微分控制;若将式(2)所示的动力学模型转化成状态空间形式,则亦可以采用最优LQR、模型预测控制(Model predictive control,MPC)等方法设计反馈镇定项;而对于一致性协同项则也可以采用其他形式的一致性算法设计。
注释2如式(22)所示,在不考虑阻尼的情况下,则可以重新选择合适的控制参数K*以及重新定义智能组件的邻接关系使得V̇2<0。即在无阻尼时采用带有一致性协同项的分布式控制仍能保证闭环系统的鲁棒稳定性。
3 数值仿真
将本文提出的基于一致性理论的分布式协同控制方法用于卫星太阳能帆板的振动控制,并与分散式控制进行比较。设计不同情况的数值仿真算例,以验证所提方法的有效性。
仿真中,假设卫星太阳能帆板的材料为铝板,结构相关参数如表1所示;将整体结构划分为4个智能组件,每个智能组件设置1个测量位置。智能组件之间的拓扑关系如图3所示。
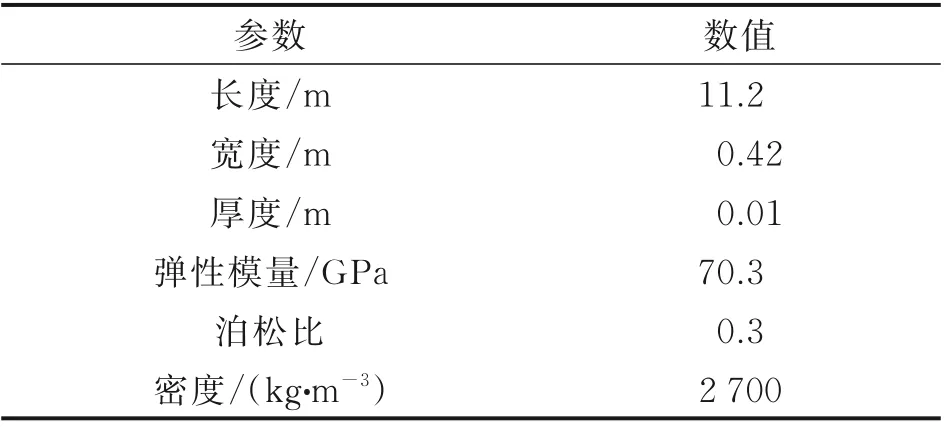
表1 卫星太阳能帆板的相关参数Table1 Parameters of satellite solar panel

图3 卫星太阳能帆板控制器的内部信息拓扑Fig.3 Internal information topology of satellite solar panel controller
(1)算例1
分别在分布式控制器式(7)和忽略一致性协同项的分散式PD控制器式(16)作用下获得控制效果。控制器增益系数由稳定性条件计算得到


其 中B1,B2,B3,B4分 别 表 示 每 个 智 能 组 件 控 制 器的位置矩阵;E表示单位阵,阻尼系数为0.01 。
首先,给定卫星太阳能帆板施加一个5N的作用力,使帆板产生初始静态变形。这作为仿真的初始状态。仿真结果如图4~6所示。图4(a,b)分别表示位置3控制前后的位移和速度变化曲线。采用分布式控制器式(7)和分散式控制器式(16)分别在约26s和50s实现了帆板95%的振动抑制效果。图5(a,b)分别表示位置4控制前后的位移和速度变化曲线。采用分布式控制器和分散式控制器分别在约26s和50s实现帆板95%的振动抑制效果。图6(a,b)分别给出了分散式控制和分布式控制作用下位置3和位置4的控制力变化曲线。通过对比可以看到在控制力幅值大小相似的情况下,分布式协同控制器由于不同作动器的输出保持了相位一致性要比分散式控制器使得位移和速度收敛的更快;同时由于一致性项的作用,曲线也较为平滑,控制系统具有更好的动态性能。

图4 控制前后位置3的位移和速度曲线Fig.4 Displacement and velocity curves of position3before and after control

图5 控制前后位置4的位移和速度曲线Fig.5 Displacement and velocity curves of position4before and after control

图6 分散控制力和分布式控制力Fig.6 Decentralized control force and distributed control force
(2)算例2

图7(a,b)分别为第3个智能组件控制器反馈镇定项失效时帆板在两类控制器作用下的位移和速度变化曲线。采用分布式控制器式(7)和分散式控制器式(16)分别约在32s和67s实现了帆板95%的振动抑制效果。结果表明,当存在控制器失效的情况下,本文提出的分布式控制器与分散式控制相比,系统状态收敛时间缩短了约35s。

图7 控制器失效时控制前后的位移和速度曲线Fig.7 Displacement and velocity curves before and after controller fails
通过与算例1中的结果比较可知,当存在部分控制器失效的情况下,分散式控制效果发生了明显的下降,稳定所需时间增加了约17s。当采用分布式控制时,由于控制器中协同项的存在,使得位置3处的控制力输出不为0。因此,采用分布式控制依旧能够使系统状态在较短时间收敛,具备更好的鲁棒容错性能。
(3)算例3
假设系统不考虑阻尼作用,在算例2的基础上进一步考虑多个分散式控制器失效的情况,以此验证本文提出的分布式控制器较好的鲁棒容错能力。
假设第2个和第3个智能组件分散式控制器失效情况,亦即采用分布式控制器时,第2个和第3个智能组件控制器中无反馈镇定项,但还存在协同项。图8(a)为2种控制器作用下位置4的位移曲线。如图所示,在多个控制器失效的情况下,采用分散式控制的位移曲线出现了密集的震荡。当假设全部分散式控制器失效,而采用分布式控制器式(7)时还存在一致性协同项,结果如图8(b)所示。在无阻尼且全部控制器失效的情况下,分散式控制器失去了对卫星太阳能帆板的振动抑制;但是本文提出的分布式控制器仍然可以对帆板起到振动抑制的作用。虽然全部反馈镇定项失效,但由于一致性协同项的存在,依然可以通过各组件之间的信息协调使得控制器的输出不为0,从而实现卫星太阳能帆板的振动控制。这表明基于一致性理论的分布式振动控制具有很强的鲁棒容错能力。

图8 控制器失效时控制前后的位移曲线Fig.8 Displacement curves before and after controller fails
4 结 论
针对卫星太阳能帆板的振动控制问题,本文建立了面向分布式控制的动力学模型,提出了基于一致性理论的分布式振动控制方法,给出了稳定性的分析过程,并设计了不同算例验证所提控制方法的有效性和容错性。
研究结果表明:(1)所提出的分布式控制方法通过各智能组件的独立控制以及智能组件之间的协同可以实现帆板整体结构的振动控制,且具备良好的可行性。(2)基于一致性理论的分布式控制器能够明显提高闭环系统的动态性能,系统状态收敛得更快,曲线也较为平滑。这主要是分布式控制器中一致性协同项对系统动态性能的改善。(3)所提出的分布式控制器表现出较好的鲁棒容错性能,部分控制器失效后依然能够借助一致性协同项实现振动控制,保证闭环系统稳定。
