基于电机电流检测的乘用车车门控制模块设计
2021-12-29刘建松徐洋谭伟江松熊秋涵
刘建松,徐洋,谭伟,江松,熊秋涵
(1.重庆邮电大学自动化学院,重庆 400065;2.重庆利龙科技产业(集团)有限公司,重庆 400020)
0 引言
汽车车门控制器是汽车上一个至关重要的部件,不管是传统的燃油车还是逐渐成为主流的电动汽车,都离不开车门控制器这一零部件。同时,由于车门控制器控制着车门门锁及车窗玻璃升降等,因此车门控制器在特定情况下是一个关乎生命与安全的关键部件[1]。所以车门控制器的研发和改进一直是汽车零部件企业中一项具有广阔前景的产业。文中将整个车门控制系统分为车窗、后视镜、门锁三大模块分别进行软硬件的设计与选型,其中车窗的控制逻辑较为复杂,功能也最多,所以将进行重点设计。
1 总体设计方案
文中设计车门控制系统采用的四控制器形式。整个分布式车门控制系统由前后左右4个门模块(DCM)组成[2]。两个前门模块通过CAN总线连接至整车CAN网络上,两个后门控制模块则通过LIN总线连接至前门模块上,该车门模块的系统划分图如图1所示。各个DCM通过响应各开关按键的输入控制信号来控制4个车门上的各个功能,形成一个完整的车门控制系统。系统左前模块除了以控制左前门的车窗、后视镜、门锁为主外,还具有驾驶员对集中控制的主控开关,即可以对右前后视镜,以及汽车前后左右4个车窗进行控制,且对各个车门操作在汽车的行进中起到失效状态,达到控制目的。系统右前模块(DCM)功能与左前模块相似,具有对右前门后视镜、门锁、车窗的动作控制功能。同时,在主控开关上还设有运行故障指示、车窗升降指示、门锁运行指示、灯光照明等系列LED器件。此外,左前车门、右前车门均配备了后视镜水平调节和垂直调节两个指示LED。由于车窗、后视镜、门锁的执行器均为电机,因此,在电机驱动状态下,电流值适时地转换成电压信号反馈给控制器,可通过检测电机电流来判断电机工作中的位置以及故障情况。

图2 车窗电机电流检测
其中,车窗自动上升时还具有防夹功能,即在玻璃上升过程中遇到障碍物时,会发生防夹反转,防夹力小于100 N。后视镜的内部装置中还配有三组电动机以及驱动器,使其能够多角度进行后视镜上下、左右的调整。当车辆在雨天或雾天行驶过程时,雾气和雨会造成后视镜模糊,影响驾驶人视线。驾驶员可通过开启后视镜内部已配备的加热除霜装置,进行除雾、除霜工作,使其视线清晰,保证驾驶人安全驾驶。门锁模块通过读取车门开关或钥匙开关输入信号来解锁汽车车门。
2 硬件设计
车门控制系统硬件设计的总体要求是控制界面简洁、功能便于实现、具有较好的稳定性和通用性,最大化地降低设计成本。其设计框架如图3所示。车门控制系统在其芯片选择上,采用了NXP公司的S32K142单片机为系统处理核心。该芯片具有稳定性高、抗干扰能力强的优点,是适用于汽车的专用芯片。
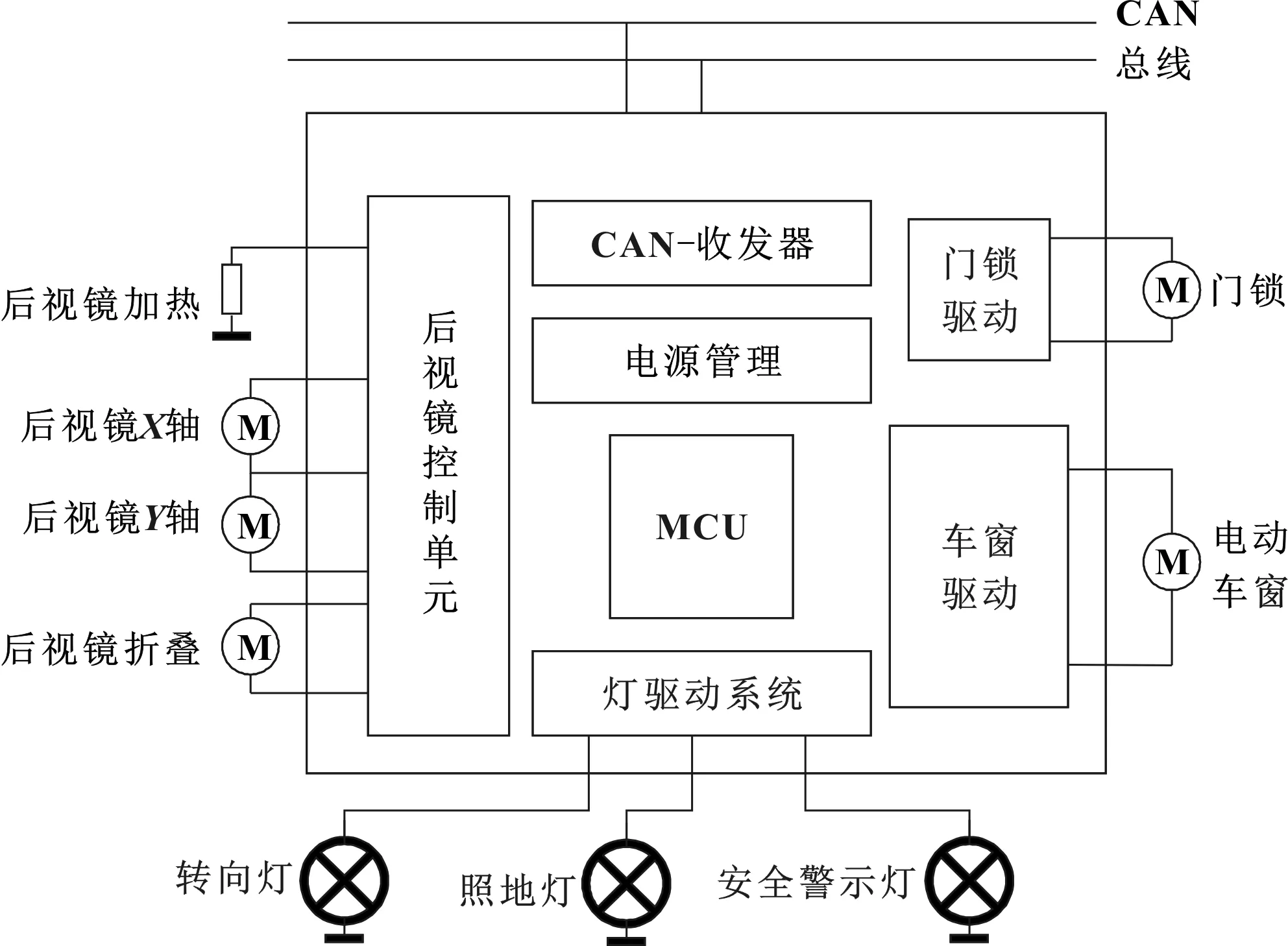
图3 系统硬件设计框架
由于车门控制系统功能复杂,单靠系统基础芯片的部分驱动能力,完全无法满足功能众多的DCM模块需求,因此在地面照明灯、转向灯、盲点检测指示灯、锁车指示DCM灯、后视镜加热、后视镜折叠/复位、后视镜调节、开关照明等一系列功能控制上需用额外一颗驱动芯片加以辅助驱动。
2.1 电机电流处理电路(车窗)
电机电流处理电路如图4所示(以左前窗为例),主要包括两个部分:低通滤波电路、差分放大电路,低通滤波部分主要是为了滤除电机电流中的高频信号和杂波,尽可能地降低或消除其在对电机电流进行分析和处理的过程中带来的影响;差分放大部分采用的是运算放大器,将采集到的电流信号经放大后输入给MCU进行软件算法的处理[4]。
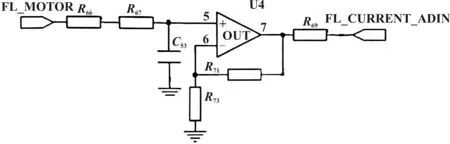
图4 电机电流处理电路
2.2 车窗电机驱动电路
车窗电机驱动电路如图5所示(以左前窗为例),主要包括达林顿晶体管阵列芯片、继电器和采样电阻(10 mΩ)3个部分,外接两个信号,一个是单片机输出的按键信号,作为继电器驱动芯片的输入;另一个是继电器的输出信号,用来控制电机转动。其中,PWR_RLY为线圈供电,D5的作用是防浪涌,电容C73用于滤波,BATT为继电器供电,同时还作为电压反馈信号被单片机的ADC端口采集,目的是为了检测继电器是否异常或电机的工作是否为继电器驱动所致,主要用于继电器黏滞检测[5]。
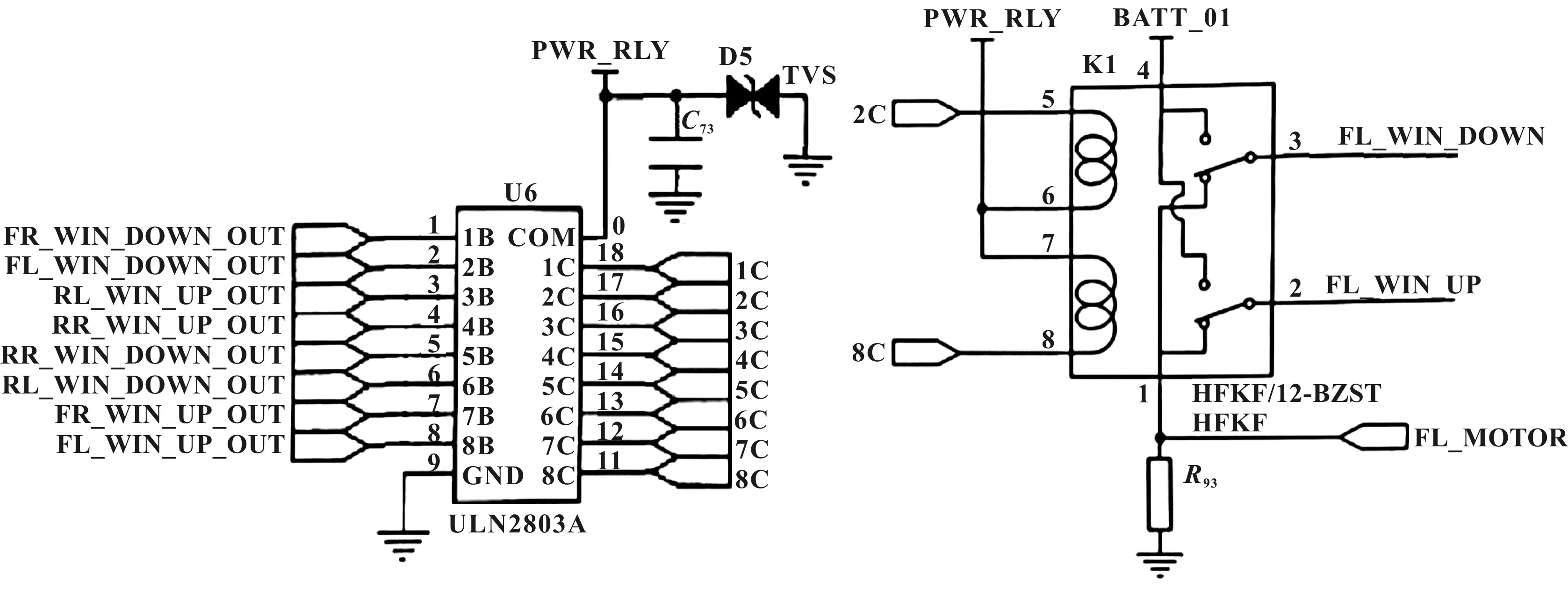
图5 车窗电机驱动电路
2.3 后视镜驱动电路
L9949是ST公司为汽车电子应用而专门开发的车门H桥电机驱动芯片[6],设计中选用它作为车锁电机和后视镜电机的功率驱动芯片。该芯片和单片机之间采用SPI的通信方式,将最大化保证信息传输的实时性。其中,OUT1和OUT2为全桥输出,OUT3—OUT5是半桥输出,除此之外该驱动芯片还配有一个高端输出OUT6,它可以驱动大功率的用电器如后视镜加热电阻丝。
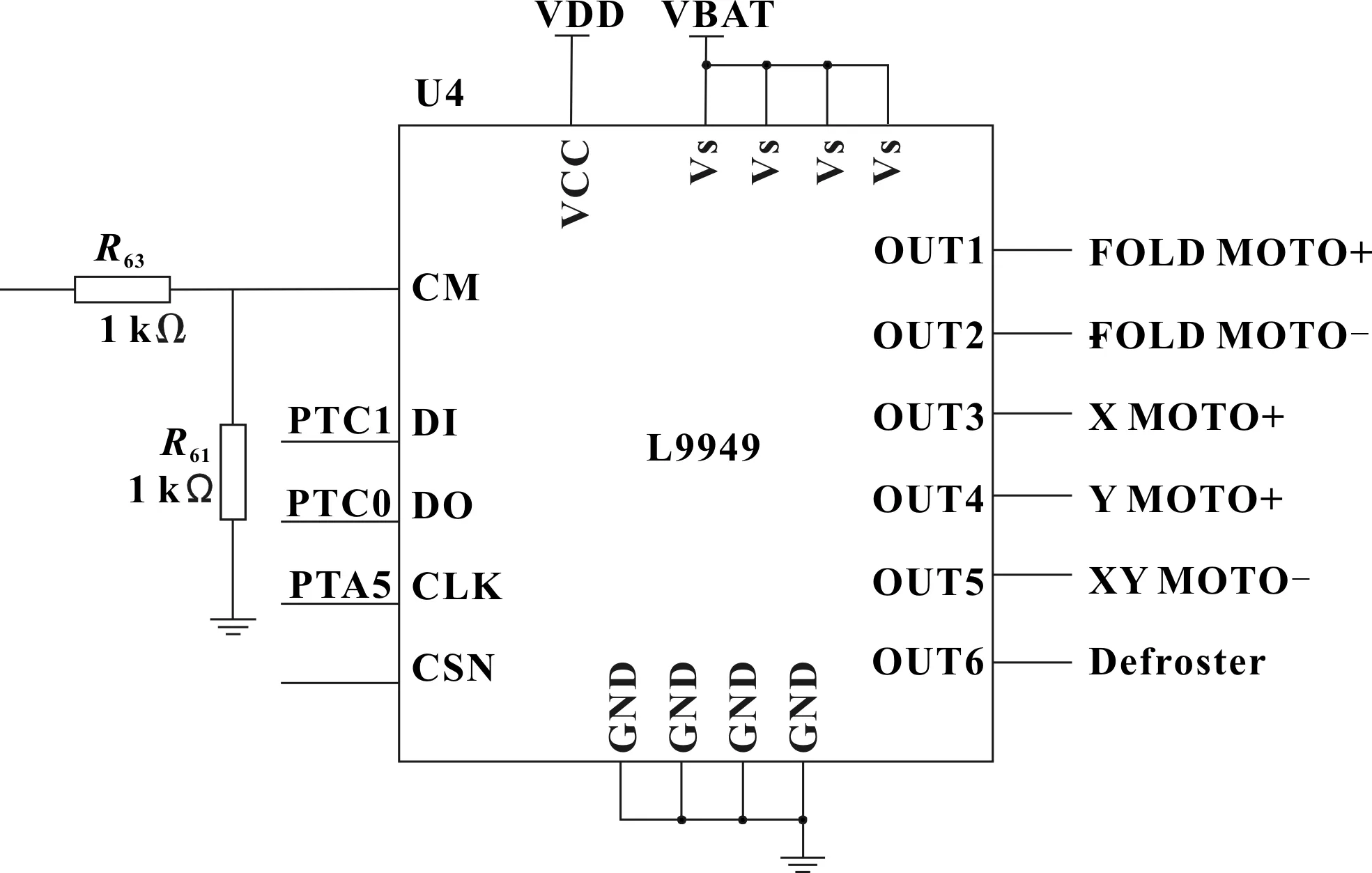
图6 后视镜驱动电路
3 软件算法设计
系统的软件设计主要分为主程序和子程序两部分。软件主程序主要用来完成系统工作过程的数据存储、处理和传送;子程序则是完成具体公民命令的执行程序,分别由系统初始化子程序、中断服务子程序、A/D采样子程序、门锁控制子程序、电机控制子程序和后视镜控制子程序等构成。
左前门控制模块的程序是众多控制模块当中较为复杂的部分,该模块不仅需要配备多个控制按钮以及多个工作命令信息的输入,而且还囊括了车辆所有车窗电机、门锁电机、后视镜的工作信息输入输出。正是因为其具有这种系统代表性,也是研究最具有挑战的部分,所以是文中研究重点方向。
电解烟气脱硫采用“双氧水脱硫塔-高效湿式电除尘器”的工艺流程。包含:吸收塔、循环泵、双氧水储槽、药剂计量添加泵、稀硫酸储槽等。尾气由脱硫塔底部进入,经喷淋和填料吸收,与双氧水溶液充分接触和反应,生成稀硫酸。脱硫处理后的烟气经除雾沫后,由塔上部排出。为控制烟气拖尾和进一步降低尾气中的污染物浓度,脱硫烟气经脱硫塔后再串联进入湿式电除尘器后达标排放。工艺流程如图1 所示。
左前门控制模块的软件主要由主程序、系统初始化子程序、中断服务子程序、A/D采样子程序、门锁控制子程序、电机控制子程序和后视镜控制子程序等构成。
3.1 车窗防夹算法
电动车窗防夹功能的实现需要先确定两个核心问题:一是车窗位置的精确判断;二是夹物力的判断。
电动车窗防夹的设计要求,要通过不断地检测电动车窗电机运动速度电流,以及玻璃上升下降位置,从而通过足够多的数据来分析确定电动车窗是否进入防夹区、是否识别到障碍物,以此来判断输出工作命令,并决定是否对电动车窗实施防夹操作[7]。
此外,受到电机电流的影响,其电动车窗会产生固定数量的纹波脉冲,由此发现,纹波脉冲个数与车窗玻璃的行程呈线性关系。图7为电机电流下的纹波脉冲信号,可以计算玻璃整个行程的脉冲个数,取相对值,从而获得玻璃的具体位置信息。
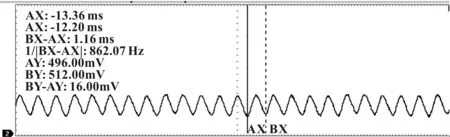
图7 纹波脉冲信号
车窗在上升过程中遇到外界阻力时,电机电流变化非常明显。所以,可以根据电流的变化情况来进行防夹检测,并执行相应操作。
从图8可知,当电动车窗识别到障碍物出现时,其电流变化很明显(图中A、B、C三点),且电流的大小与所受到的阻力成正比关系(A点阻力>B点阻力>C点阻力),但是,所遇阻的电流变化斜率是远小于堵转时的斜率,且电流值也小于电机启动和堵转时的值。根据上述遇阻电流的特性,可以采取面积积分法来判断车窗是否遇阻:所谓面积积分法[8],就是在电机电流曲线上取一段时间Ts,对横轴(时间)与纵轴(电流)围成的矩形面积求积分,若在防夹区域的某个时间内,面积积分S大于防夹阈值S0(通过多次试验取平均值的方法求出车窗受堵时的面积阈值,可通过自适应算法自动更新),则判断为车窗受阻而进行防夹操作。
假设有一底边固定为Ts,高度可变并能沿时间轴移动的矩形框,它底边的位置是由Ts时间段内最小的电流值确定的,如图8中矩形框A所示。在矩形框内,电流曲线的起始时间为t0,此时电流为I0;结束时间为t1,此时电流为I1;任意时间t对应的底边方程为:
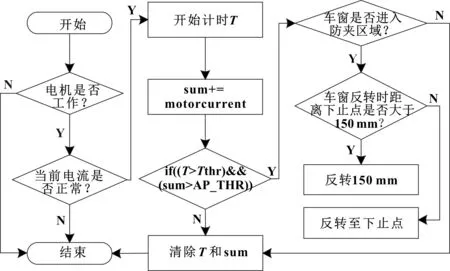
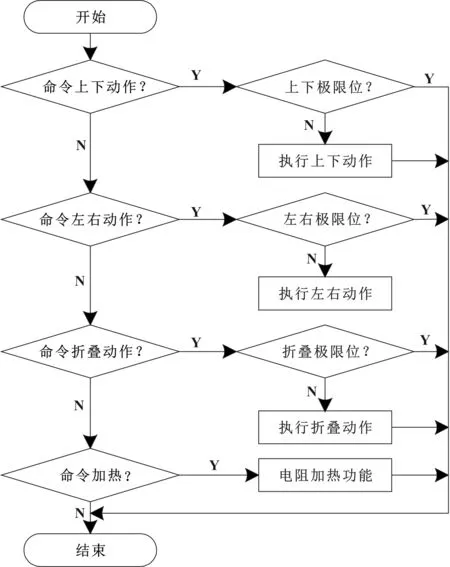
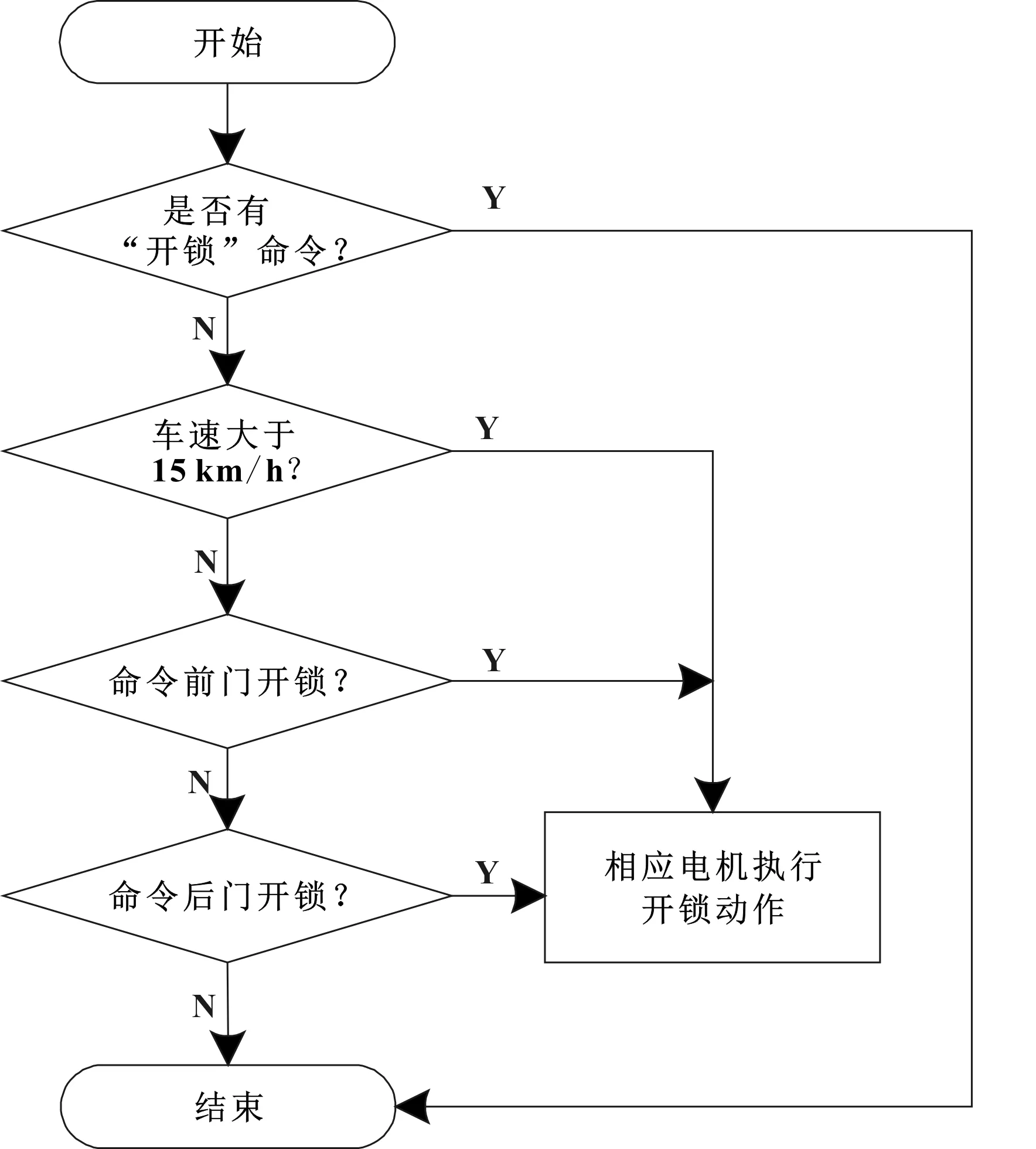
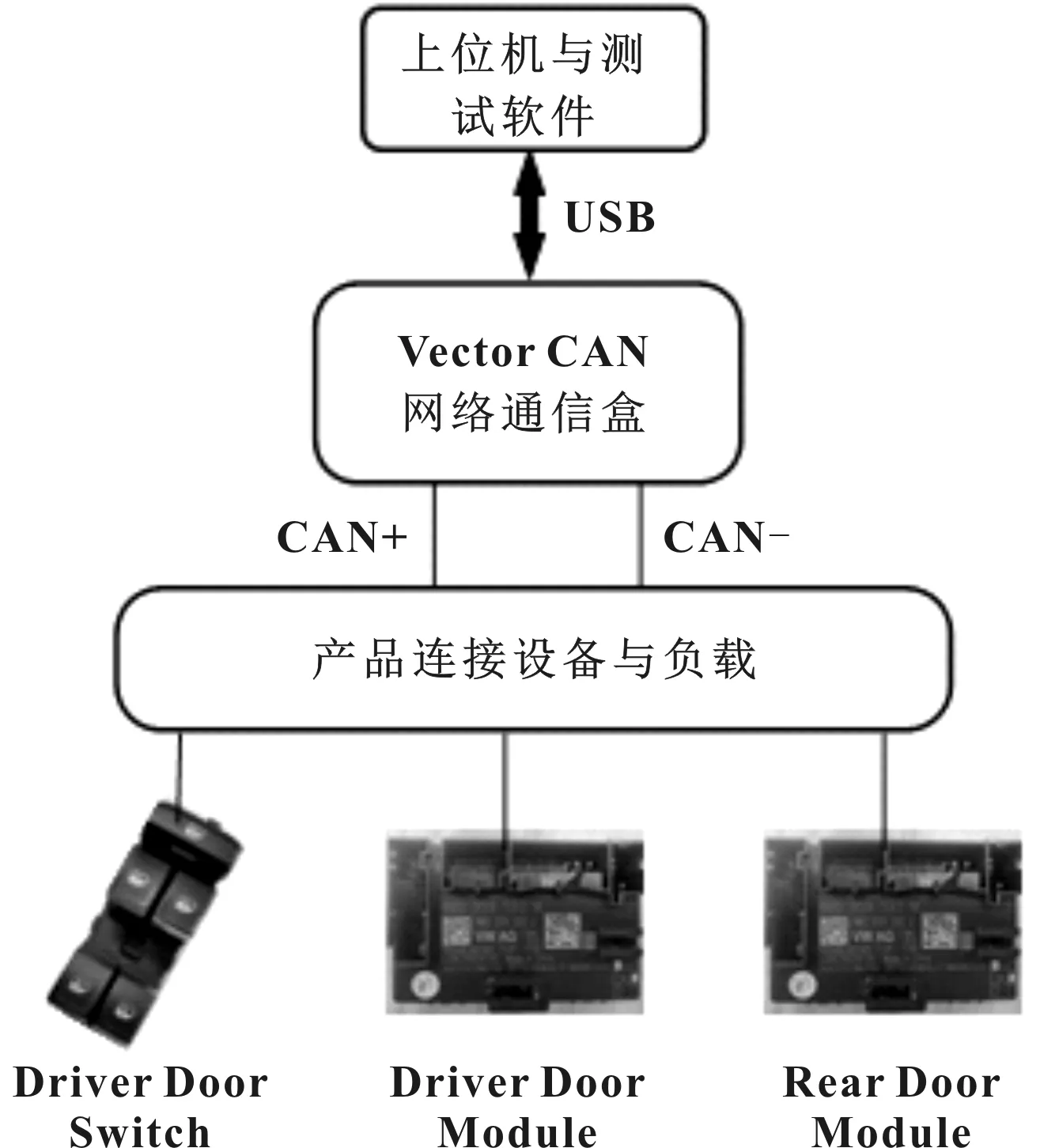
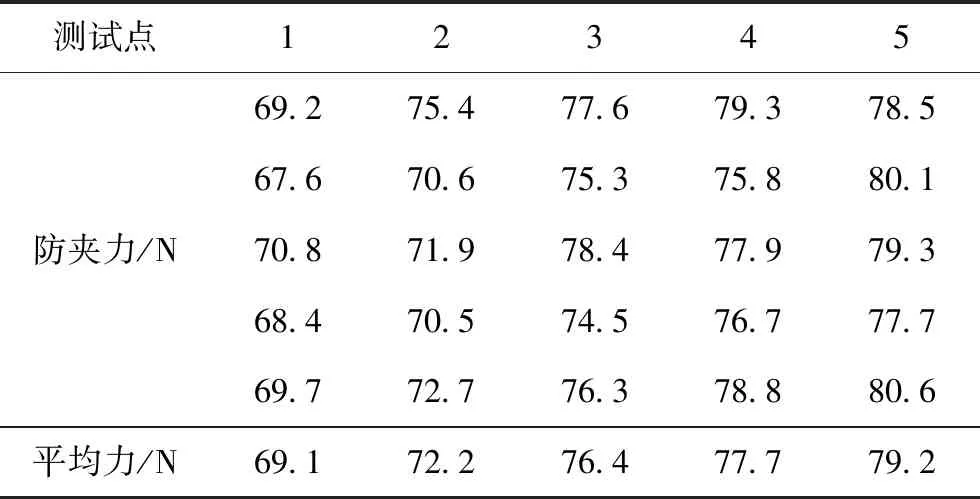
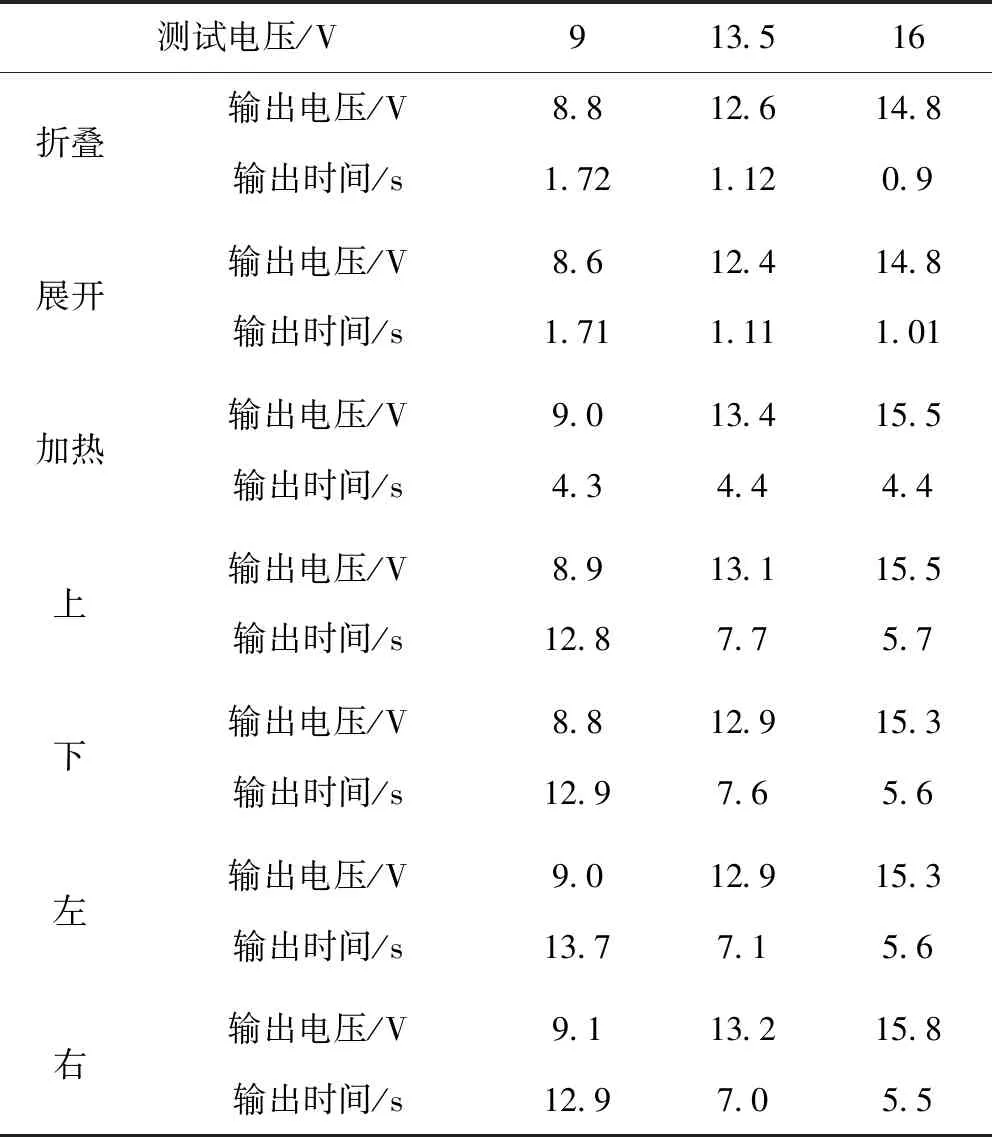
I(t)=min(t),t0 (1) 在确定的时间T=t1-t0内,电流曲线与该矩形框的底边及两条高所围成的面积为: (2) 若在时间T内S>S0,则判断车窗受堵,并执行相应防夹操作。车窗防夹功能的软件流程图如图9所示。 图9 电流防夹软件流程 后视镜内部配备的电机,在设计上,采用的是组合式开关,组合开关由左右后视镜和上下、左右角度组合而成,驾驶员通过组合式开关,即可实现左右后视镜,以及上下、左右角度的视角调整。 车辆的门锁为二级安全件,设计选用直流电机来作为门锁的执行机构,通过检测状态信号来控制门锁的开闭,即中控锁的解闭锁、童锁的解闭锁等动作。门锁控制模块还设计5个独立的微动触点,即车门打开和关闭信息、上锁和解锁信息、锁闭车门信息、安全锁生效信息和锁闭车门安全锁失效信息。 当中央门锁处于打开状态时,其门锁是无法上锁的,或是门锁处于失效状态;当中央门锁安全锁处于打开状态,其门锁不具有安全锁功能,安全锁电机处在关闭位置,门锁不能解锁。后视镜和门锁的控制流程如图10和图11所示。 图10 后视镜控制流程 图11 门锁控制流程 在文中设计时,通过设计一台连接器设备和负载设备,将前后车门控制器连接到同一台测试设备上。通过相应的车门控制开关和上位机软件来发送模拟或数字消息给各个控制模块,不仅能够方便地测试单个车门控制器的功能,还可以检验前后车门控制器间的匹配度,以便及早发现问题并进行相应的改善。 图12是系统测试框图,使用上位机软件,通过Vector公司的CAN诊断工具来测试与诊断连接前后车门控制模块。可以连接在产品测试设备上的车门开关来控制车门控制器的相应功能。 图12 系统测试框图 首先是车窗防夹力的测试。以左前车窗为测试对象,多次测试后,防夹成功率在99%以上,并记录了5个不同点的防夹力,每个点测试了5个数据,防夹力变化见表1。 表1 车窗玻璃防夹力变化 从表1中的数据可以看出,在车窗的不同点进行防夹时,防夹力基本上在80 N以下变化,满足设计要求。 其次是对后视镜模块的功能测试。通过主架位置的开关总成上的物理按键来控制后视镜的折叠与打开、上下左右方向的调整,以及后视镜加热等功能,确保后视镜各项功能均正常工作。同时测试后视镜折叠、加热以及各个方向调节时在不同电压输入条件下的工作情况和输出能力,确保输出信号参数满足设计要求。 表2为后视镜输出参数测试结果。由此可知,测试全部合格。 表2 后视镜输出参数测试 通过对各个电机电流的检测,设计了一款多功能车门控制系统,该控制系统具有车窗自动升降及防夹、后视镜调节和加热、门锁电动解闭锁等功能,其中车窗的防夹功能符合GB 7258—2017标准的要求,防夹力普遍低于100 N,且后视镜电机和门锁电机均正常工作,达到了智能化控制的目的。
3.2 后视镜和中控锁控制
4 系统测试与验证
5 结束语
