机器视觉测量技术在既有公路隧道拱顶沉降监测中的应用
2021-12-17陈必港
■陈必港
(福建省交通科研院有限公司,福州 350004)
隧道拱顶沉降监测通常采用人工监测的方法,如全站仪法、水准仪法。 但对于已开放运营的既有隧道,传统的人工监测方法已经不能满足实际监测的任务要求。 一是因为监测作业过程中需要道路布控,极大地增加了监测成本,且现实条件不允许如此频繁的占道作业;二是隧道中车流量大、车速快,给作业人员人身安全造成了重大隐患;三是每次需要作业人员亲临现场架设仪器、测量,费时费力;四是受天气影响、人为等因素,监测数据时常会存在不连续的现象。 随着科学技术的发展,自动化监测技术应运而生替代了人工监测。 目前主要有近景摄像测量系统、光纤监测系统、多通道无线遥测系统、全站仪自动测量系统、静力水准系统、巴塞特结构收敛系统等[1]。 本文主要探讨近景摄像测量系统类别中的机器视觉测量技术。
机器视觉测量技术,其原理主要是通过机器视觉产品将被摄取目标转换成图像信号,并经图像处理系统转换得到数字化信号,用以判别被摄取目标体特征。 肖和华等[2]提出一种基于光笔式机器视觉测量系统的非接触式沉降监测方法,并引入到路基沉降测量中。 张劼等[3]基于机器视觉理论,对桥梁形变在线监测技术进行了研究与探讨,并运用相应的测试系统,对拱肋与桥塔偏位、桥梁斜拉索振动位移监测等桥梁较为关键的部位的位移情况进行了测量。 卢泉[4]基于机器视觉设计了一套高性能的特殊管道静态参数测量系统,研究了特殊管道测量环境下视觉测量分系统的优化设计、靶标图像的预处理、基于图像测量的高精度定位和静态参数测量的实现等关键技术,并提出了相应的解决方案。 向启安[5]阐述了基于机器视觉的工程安全监测解决方案,并结合贵州六盘水某地质灾害监测、浙江申嘉湖边坡监测项目分析该方案在边坡和滑坡灾害监测预警中的实际应用。 综上所述,现有研究成果鲜有机器视觉测量技术在既有公路隧道拱顶沉降监测中的应用。 因此,本文在阐述机器视觉测量技术原理的基础上,探讨了该技术在既有公路隧道拱顶沉降监测中的应用。
1 机器视觉测量原理
工业相机作为机器视觉的关键组件[4],机器视觉的基本模型就是用工业相机通过小孔成像原理得出的[2],即测量时将空间的某一点坐标成像在相机图像坐标系中,再用图像坐标系中已知坐标的像点来反推空间的该点坐标,具体过程如下:假设空间一点A 的坐标为(X,Y,Z),其在相机图像坐标系中的坐标为(x,y,z),那么从空间坐标系到图像坐标系,有:
式中,R 是3×3 三阶旋转矩阵,T 是三阶的平移向量,两者皆为相机参数,决定了空间绝对坐标系到相机图像坐标系的坐标变换关系,具有唯一性。
由小孔成像模型可知,若不计误差,则有:

式中f 为相机焦距。
同时,图像平面坐标系和相机坐标系具有如下关系:

式中,u0、v0代表像点中线坐标;Nx、Ny代表单位距离内像素点的数量。 将式(2~5)代入式(1),则图像坐标与空间坐标的关系式可以表示为:
式中的Z 为物像距离, 在测量系中是已知的,因此通过式(6)即可测得空间点A 的坐标。
那么在T0、T+1 时刻,A 点的位移变化量为:
式中ΔX、ΔY、ΔZ分别为A 点由T0时刻至T+1时刻在X、Y、Z 方向的位移量。
在上述理论的基础上,采集的信号通过光与电荷信号的转换以及模数的转换,并经过数据传输呈现给用户,测量原理详见图1。

图1 机器视觉测量原理
2 工程应用
2.1 工程概况
某新建高铁在DK237+524~+574 里程处上跨既有公路隧道,高铁路肩顶部距离隧道拱部衬砌外缘最小净距约2 m, 公路隧道原结构设计未考虑上跨铁路荷载和影响,铁路施工及运营期间铁路及公路安全均不能保证, 因此需对交叉影响段公路隧道衬砌结构采取“置换加固”方案处理,即拆除公路隧道交叉影响段并对公路隧道结构进行重建加强。 为保证隧道结构安全,置换加固过程中及置换加固后一段时间都需要进行拱顶沉降监测。 本文研究的是机器视觉技术在置换加固后的监测过程。
2.2 监测方案
采用TH-ISM-ST 型机器视觉测量仪, 配合TH-DQG-BM01 数据箱和90×90 标准靶标,在新建高铁与既有公路隧道交叉影响段左洞拱顶处共布设3 个测点, 各测点所在位置分别为:1# 监测点为ZK19+275;2# 监测点为ZK19+290;3# 监测点为ZK19+300。 测点布设如图2 所示。
所有监测设备每1 h 采集1 次数据,每天24 h不间断采集。 为减少过往车辆振动对测点数据产生的影响及减小外界温度的影响,在进行分析时取每日0 点左右的数据为当日的分析数据,其余时间点数据为突发情况时的参考数据。 监测方案具体内容如表1 所示。
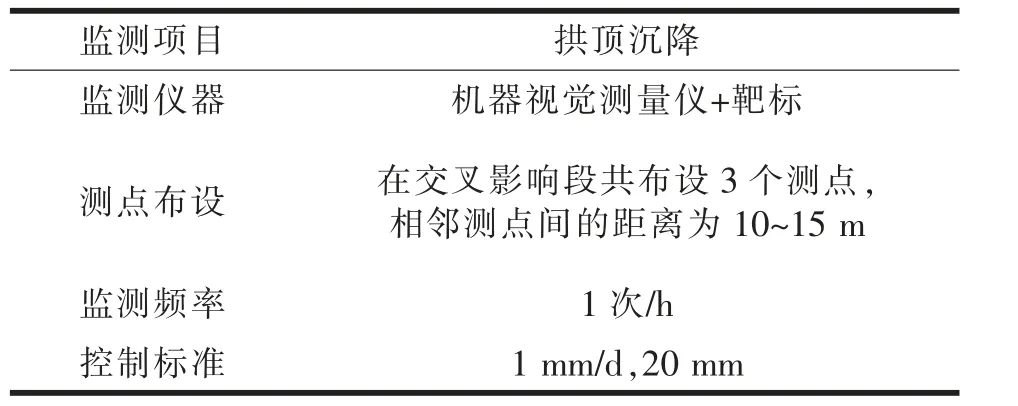
表1 拱顶沉降监测方案
仪器安装调试完毕,后期工作均通过云平台实现,该平台具有数据查看、存储与分析、结构物状态预警、报警、报表自动化生成、人员与设备管理等功能,其工作界面如图3 所示。
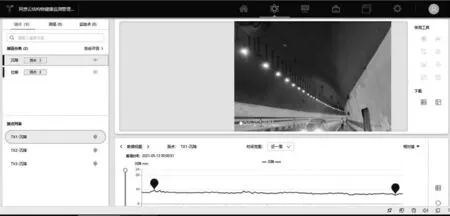
图3 云平台工作界面
2.3 监测结果精度分析
监测时间段为2021 年5 月20 日-6 月28 日。监测期间内,对每个监测点每日0:00-23:59 的测量值分别计算中误差后再计算其算数平均值。
经计算,各测点仪器观测值中误差均值统计结果如表2 所示。 由表2 中可知,各测点中误差均值均小于±0.30 mm, 能够满足实际测量精度要求,也进一步证明机器视觉测量技术在既有公路隧道拱顶沉降监测中应用的可行性。

表2 各测点中误差均值统计
2.4 监测结果应用分析
从图4 可以看出,3 个监测点波动值最大为5.60 mm, 最小为3.20 mm,3 个监测点监测数据总体变化趋势平稳,无明显波动迹象,且后续有回落的迹象,说明隧道结构无明显变形。

图4 各测点拱顶沉降累计值变化曲线
同时,云平台自带预警、报警功能,当监测值达到或超过预警、报警阈值时,云平台会自动向用户发送警示信息。本次以拱顶沉降日变化量1 mm/d 作为报警阈值,以0.8 倍的日变化量为预警阈值。 监测期间,未收到警示信息,进一步说明监测结果正常。
3 机器视觉在既有公路隧道中的应用较之于其他工程的难点问题
(1)通视不佳。 一是隧道为近封闭空间,在里面作业通视本身不如路基、桥梁等工程良好。 二是隧道经常会存在变曲线的情况,这就导致每台仪器覆盖的监测点数有限,也给仪器安装调试带来了很大的困难。
(2)仪器受外界干扰因素多。 既有公路隧道内,车流量大、尾气多、热气重,这些因素都有可能会影响仪器的测量精度。
(3)仪器维护、管理难度大。 在仪器使用过程中,随时可能出现数据传输信号中断、数据不稳定的情况,需要监测人员进入隧道内检查。 为保障人员人身安全,需要协调各方对道路进行布控,从而增加了维护、管理难度。
4 结语
基于机器视觉测量技术及移动通讯传输技术,可实现自动化监测。 本文将机器视觉测量技术应用于既有公路隧道拱顶沉降监测中,取得了良好的应用效果。 但其中仍存在一定的不足之处,在今后的工作中需进一步完善:(1)监测工作是在隧道置换加固后开展的,隧道已恢复交通,无法进行人工监测,导致机器视觉测量结果未能与人工监测结果相比较,监测结果无法保证;(2)本次监测仅在新建高铁与既有公路隧道交叉影响段(变形区)布设测点,未考虑在远离交叉影响段(非变形区)布设测点,导致监测结果无对比性;(3)机器视觉测量技术利用了光在空气中的传播。 隧道内车流量大、尾气多、热气重,会导致大气的非均匀性分布。 当光在这样的环境中传播时,其传播方向会偏离直线传播,本研究未能从技术层面深层次地分析这方面对测量精度的影响。
