倾斜摄影测量教学无人机的设计与应用
2021-12-14王星捷袁伟强
王星捷,杜 华,袁伟强
(1.成都理工大学工程技术学院,四川乐山 614007;2.四川经准检验检测集团股份有限公司,四川广安638500)
0 引言
倾斜摄影技术具备了传统的航摄相片和地面影像的双重优势,在测量的过程中,不仅能获取顶面纹理,同时其搭载的倾斜相机能够获取地物的侧面纹理信息。伴随着无人机技术的快速发展,成本低、操作灵活、数据地面分辨率髙、受天气影响小等特点,无人机倾斜摄影测量技术在社会发展的各个方面将发挥着越来越重要的作用[1]。
倾斜摄影测量无人机技术的迅速发展,在很多方面正逐步取代传统的测量,目前已经应用到各个领域。在三维建模领域的研究有高陡崖三维建模[2]、古建筑三维建模[3]、城市精细化三维建模[4]等。在数字测图上的研究有三维模型测图[5]、城区摄影测量[6]和矿区线状地物的构建[7]等。在矿产资源方面的研究有矿产资源监测应用[8]等。在自然灾害方面的研究有崩塌隐患调查评价中的应用[9]等。在工程方面的应用研究有大型水利工程及BIM 建设中的应用[10]等。鉴于倾斜摄影测量技术的重要性,国内大多数高校设置了摄影测量学的课程,由于场地有限以及航飞成本高,导致了该课程的实验教学无法开展。当前倾斜摄影实验教学方面的研究相对较少,仅有李培荣等[11]研究的倾斜摄影测量教学模拟系统设计与应用。模拟系统无法给学生带来真实的效果,以及无法达到无人机倾斜摄影测量技能培养的效果。本文研究市场主流的倾斜摄影无人机参数特点和性能分析,结合学校校园场地条件,设计了倾斜摄影教学无人机,弥补了倾斜摄影实验教学的空白。
1 商用产品在教学应用上的问题
1.1 起飞前检查流程繁琐
大多数的商用倾斜摄影测量无人机的体积大,自重大,不便于携带。野外作业中,需要借助于交通工具进行运输,而校内教学不具备汽车运输这个条件。另外在任务开始前,需要寻找适合起飞的场地、架设天线、拼装飞机、清理周围起飞场地及疏散人群等繁琐的工作。老师的重点是教导学生航测的专业知识,如何规划航线,如何设置高度、如何收集数据以及如何处理数据,而不是将精力放在一整套航测工作上面。
1.2 商用产品在校内飞行条件不具备
市场上多用固定翼或垂直起降固定翼机型来执行航测任务,然而学校场地对于专业的倾斜摄影无人机的起降来说还是相对较小,空旷的场地较少,大型场地只有运动场。学校运动场能为无人机起降提供安全的距离仅100 m,而专业产品中,相对小型的倾斜摄影无人机的安全起降距离一般要大于100 m(见表1)。
通过表1 中的产品的参数对比,学校场地无法满足起降的条件要求。而且校园内环境复杂,校内树木、房屋较多,教学楼密集,飞行器容易与这些障碍发生碰撞,造成安全事故。

表1 商用倾斜摄影测量无人机起降参数
1.3 实验成本高
对于教学来说,专业产品的购置成本较高(见表2),不利于用于日常的教学任务中。

表2 倾斜摄影无人机价格
通过价格对比,可知专业产品非常昂贵,如果在教学中,出现意外,损失较大。在教学中,对无人机的使用比较频繁,采用专业产品,维护成本相对较高。因此,专业产品在高校教学中并不适合。
2 倾斜摄影测量教学无人机设计
对于高校教学来说,无论是常见的固定翼还是新型的垂起固定翼,都显得过于巨大,并且使用环境也受到了诸多限制[12]。因此,采用多旋翼无人机为基础的飞行设计平台[13]。
倾斜摄影测量教学无人机的设计包括硬件系统和软件系统两大部分。
倾斜摄影测量教学无人机硬件系统是航测的基本硬件设备,基础是无人机飞行平台,搭载高像素高分辨率相机,完成对测区的数据采集任务。
倾斜摄影测量教学无人机软件系统包括远程的数据传输系统、起飞航线规划系统、航片数据检测以及地面站飞行控制系统。软件系统基本上包办了航测无人机的任务规划、航线设计、数据采集与传输和航测区域规划等功能。
倾斜摄影测量教学无人机硬件平台由机体载物平台、飞行动力系统、飞行控制系统、电力系统、数据通信系统、地面操控系统、影像拍摄系统和定位导航系统组成。具体设计指标如表3。

表3 自制倾斜摄影测量无人机设计指标表
2.1 机体载物平台
采用六旋翼作为飞行平台的基本架构,六旋翼无人机具有6 个电动机,虽然本身重量较大,但是其可靠性及抗风性都远高于传统的固定翼无人机。该机使用碳纤维作为机体主要材料,机臂使用21 mm空心碳管制作,重量轻、强度高。机臂与机体之间采用卡扣连接方式,能快速组装或拆卸,极大地方便教学人员的操作。连接件采用6 系铝合金材料制造。
2.2 飞行动力系统
动力系统采用破风无人机动力系统,此系统具有价格低,使用时间长,可靠性高和较为省电的优势,并且螺旋桨与电动机的连接件为M3 螺丝,杜绝了由于转动速度过快,桨叶突然脱落的危险情况发生,提高了飞行安全性。电子调速器使用好盈40 A电调,该电调采用Dshot125 电调协议,电磁干扰更低、油门响应速度更快。
2.3 飞行控制系统
飞行控制系统采用通用的Pixhawk 开源飞控系统,该系统经济又实用,目前多数的飞控系统采用了该系统。飞控板采用IMU分离技术进行设计,避免了在飞行过程中,飞控内部电流之间的干扰,同时减震效果较好,大幅降低飞行平台带来的高频振动,极大地提高飞行稳定性,保障了无人机的安全。为了保证精度要求,飞控板内置了LSM303D 型号的三轴加速度计、L3GD20 型号的三轴数字陀螺仪及MPU6000 型号的磁力计,同时配备MS5611 高精度气压计,以满足±10 cm高精度的定高需求。
2.4 电力系统
电源系统采用22.2 V、16 Ah 锂聚合物电池为动力源,采用雷迅精准高压电流计,通过板载降压模块(UBEC)将电力分配给飞控和6 个电动机以提供动力。这套电源系统可以为无人机提供20 min 左右的续航时间。
2.5 通信系统
通信系统采用915 MHz 数传电台,功率为100 MW,可在使用mavlink 协议时与无人机在1 km 内有效通信,本校内最易干扰飞机的信号源(对讲机),大多采用433 MHz 频段,对数传信号干扰较大,所以采用915 MHz频段的数传电台。
2.6 操控系统
采用国产遥控器天地飞9。采用的是成熟的FHSS调频和DSSS 扩频技术,能应对各种情况下的干扰性,保证飞行操控的稳定性。使用9 通道PCMS 接收机,遥控半径为1 km。优点是技术成熟、价格低廉。
2.7 定位导航系统
采用市面上成熟的M8N导航模块,该模块可以同时接受3 种卫星信号,这里只需要常用的GPS 和北斗卫星信号即可。M8N导航模块中内置了电子罗盘,与飞控板的内置陀螺仪互相配合,保障了无人机导航的安全性。
2.8 影像拍摄系统
影像拍摄系统采用鹰眼飞莹8S运动相机,选购无畸变镜头版本,镜头直径12 mm,焦距32 mm,为定焦镜头。使用5 台运动相机组成一个5 镜头倾斜摄影设备,利用快门线连接5 台相机,接入飞控。
倾斜影像拍摄系统由1 个下视方位相机和4 个倾斜方位相机组成。下视方位相机垂直对地观测,获取垂直影像。与该相机4 个正交方位分别以一定的倾角放置一个相机。针对多种排布可能,通过对地物覆盖范围、倾斜影像分辨率等因素进行计算与仿真,确定较优的排布模式为下视影像长边跨航线、前视、后视影像长边跨航线、左视、右视影像短边跨航线。5 镜头位置设计如图1 所示。

图1 5个镜头的位置示意图
2.9 软件系统
软件系统采用了Mission Planer地面控制软件,控制航飞和数据采集;采用Smart3D[14-15]数据处理倾斜摄影测量数据和三维点云建模软件对三维点云模型进行三维建模。
3 教学实验设计
3.1 任务区域
教学任务设计主要使用倾斜摄影无人机对学校内部分区域进行倾斜摄影测量、空三测量,三维点云模型生成。
实验飞行的区面积约为121 352 m2。西起学院工程训练中心,东至第4 教学楼外围,北到第8 教学楼外围,南到沫若广场。地形大多为平地,地物多为教学楼和绿化树木,地势东西起伏明显,高度由东向西逐步递减。
根据H=(f×GSD)/ɑ计算标准,Firefly6s运动相机的参数,进行行高计算,计算得出行高为110 m。
国家地形航空摄影规范中,要求飞行过程中,航向要保证60%~65%的重叠,特殊情况下最低的不能小于56%,最大的不能超过75%;旁向的重叠率也有规定的要求,一般在30%~35%之间,像片倾角一般情况下不能大于2°,特殊的不能超过4°;旋偏角规定不能大于10°,特殊的不大于12°。
在国家低空数字航空摄影规范中,要求飞行中,其航向重叠率一般在60%~80%之间,特殊的情况下不小于53%;旁向重叠率要保证在15%~60%之间,特殊的情况下不低于8%;像片倾角在5°~12°之间,保证超过8°的航片数量不能超过总航片的10%。
参照国家规范要求,设计了倾斜摄影测量实验。在本次实验中,飞行约为10 min。
3.2 数据采集
航飞测量区域范围内,可以观察到航带数量,控制点基线数为6 条,控制点数量为12 个。通过数传电台和GPS采集控制点信息。控制点与航线位置见图2。
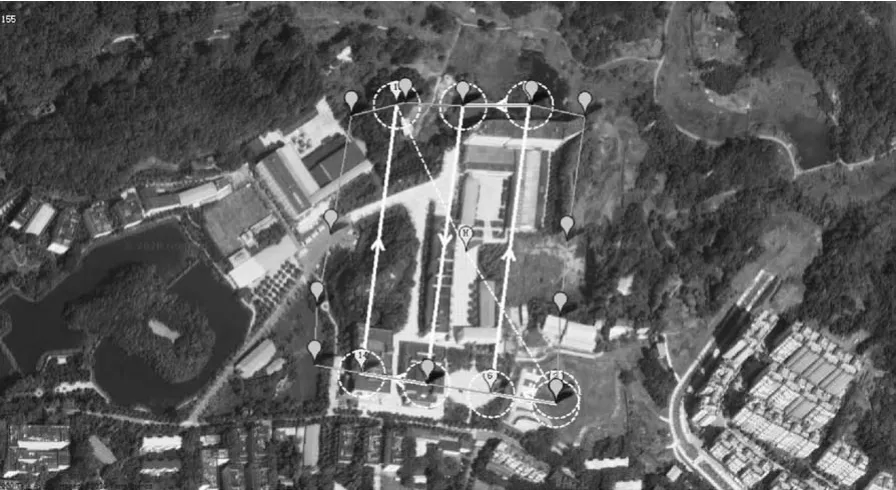
图2 测区航带分布图
将飞控原始数据导出,通过分析整理出所需外方位元素,外方位原始数据和原始图像如图3 和图4所示。

图3 部分原始数据

图4 部分原始图像
4 实验数据处理与分析
在本实验中主要使用Smart3D 软件,这是目前倾斜摄影最常用的空三解算软件,并可以自动生成DSM和数字点云。实验在飞行过程中对角度的控制,以及风速的影响,无法完全到达规范的要求。可能会产生畸变。
考虑到会有畸变的产生,在设计的时候选择了无畸变的运动相机,所以获取到的影像的畸变差相对较小。本文设计的倾斜摄影测量无人机采用的是运动相机,运动相机所搭载的镜头是焦距固定的镜头,也可以认为该畸变差属于系统误差。可以在空三计算过程中,利用软件算法解决。
将原始数据和原始图像导入Smart3D 建模软件,软件默认为WGS84 坐标系,该无人机系统采用的也为WGS84 坐标系,坐标系无需修改。一个控制点一般情况下会在2~3 张航片上同时被刺出,为了保证数据的精度,需要对部分数据点进行修正处理,具体的修正数据点如表4 所示。

表4 部分修正数据
通过数据修正处理后,将修正的数据导入Smart3D软件,通过空三计算和生成密集点云模型。数据精度分析报告如图5 所示。

图5 精度分析报告
通过对质量检测报告中的控制点误差统计的分析,如点G03,其X、Y、Z误差为30 mm,2 mm,9 mm,学校的地形基本属于平地,对照国家的《数字航空摄影测量空中三角测量规范》中对1∶2 000 测图精度要求:平面位置误差值小于0.7 m,图5 中的数据X、Y、Z的误差均小于0.7 m,证明本次实验数据精度要求符合国家规范标准,实验结果有效。软件生成密集点三维云模型如图6 所示。
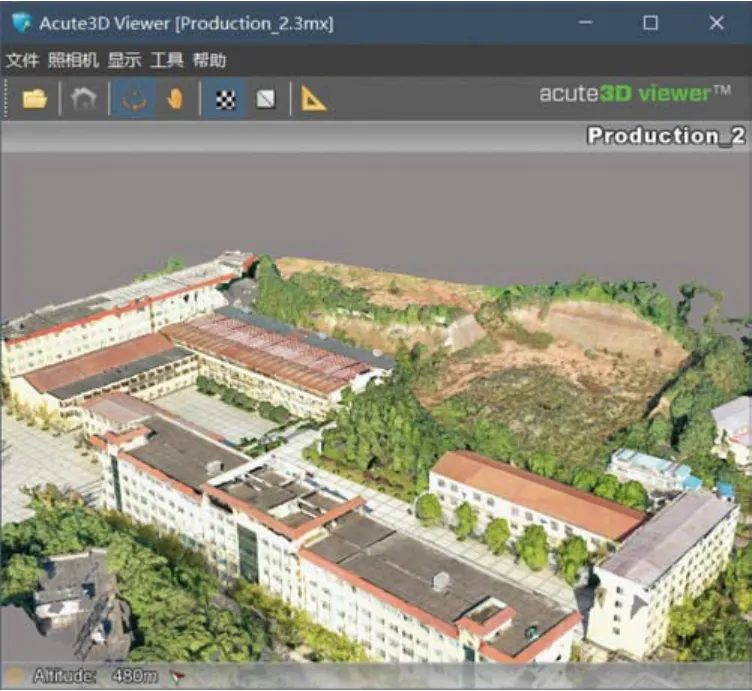
图6 三维点云模型
从图6 生成的三维点云模型,可以看出本次倾斜摄影测量生成的三维模型效果真实度高,模型精细程度较好,三维模型的纹理贴合度高,能很好地反映各类地物,满足了实验教学数据处理的需求。
5 结语
在分析了当前倾斜摄影无人机产品的特点、校园场地的特点以及在摄影测量实验教学中的缺陷的基础上,设计了一种低成本、高性能及高精度的倾斜摄影测量教学无人机。根据校园的场地情况和实习教学的需求,对倾斜摄影无人机的主要性能参数进行了分析,综合了高性能和低成本,选择合适的硬件设备和设计合理的相机系统,完成了倾斜摄影测量教学无人机的设计,并选择了合适的空三数据和三维点云模型处理软件系统。根据倾斜摄影测量相关的国家规范要求进行实验教学任务设计,进行了具体教学应用。经过数据采集、误差处理、数据分析和三维模型处理,从实验数据分析结果,得出的本次实验各项数据符合国家《数字航空摄影测量空中三角测量规范》的要求,生成的三维点云模型,精度较高、纹理清晰、地物清晰可辨,完成了摄影测量实习教学的内容。使用结果表明,设计的倾斜摄影测量无人机可靠、实用,可有效满足摄影测量实习教学的要求。
·名人名言·
想像力比知识更重要,因为知识是有限的,而想像力概括着世界的一切,推动着进步,并且是知识进化的源泉。严格地说,想像力是科学研究中的实在因素。
——爱因斯坦
