基于深度学习的离轴数字全息成像技术
2021-12-14单明广管学亮
单明广,管学亮,刘 磊,钟 志
(哈尔滨工程大学a.信息与通信工程学院;b.先进船舶通信与信息技术工信部重点实验室,哈尔滨 150001)
0 引言
离轴数字全息技术由于参考光与物体光之间存在一定角度,可在频谱空间分离全息的实像、共轭像和零级像,能够有效地解决零级像和共轭像难以去除的问题,因此可以通过一次曝光采集完成全场定量成像测量,具有速度快、实验结构简单等特点。Dashdavaa等[1]提出了一种利用时分复用技术和频谱偏移技术重建离轴数字全息图的方法,该方法通过数字时分复用技术和一张额外的旋转90°的全息图去除零级像,再通过频谱偏移技术提取实像,进而获得高质量的再现像;Liu等[2]提出了一种利用克罗内克积插值法提高离轴数字全息图质量的方法,该方法通过克罗内克积对全息图进行插值操作,从而在原始空间产生混叠频谱,进而抑制零级像,增加再现像的质量。但是这两种传统数字全息重建算法除了需要采集或生成额外全息图外,还需要精确的先验信息,如:入射光波长以及物距;或者复杂的硬件结构,如:马赫曾德尔干涉仪结构[3]。因此,如何针对离轴数字全息系统实现端到端[4]的重建具有重要的研究价值。
现阶段的重建算法中,Holo-UNet[5]通过优化U-Net网络结构,修改了不同维度的卷积核大小,提升了重建性能;但是检测速度和检测精度依然存在很大的提升空间。本文提出了一种基于HRU-Net(Holographic Reconstruction U-shaped Network)的离轴数字全息重建算法。该算法首先输入单张全息图;然后通过非对称残差卷积块[6]获得不同尺度的底层特征;接着通过堆叠多个残差块[7]进行全息特征的深度提取;最后通过转置卷积与特征拼接[8]输出高质量的重建图像。
1 离轴数字全息术
本算法的数据集分为两部分,其中,实验振幅全息图通过马赫曾德尔干涉仪结构采集,结构如图1(a)所示;实验相位全息图通过白光衍射显微系统[9]采集,结构如图1(b)所示;最终采集到的两种离轴数字全息图都是通过计算机进行传输与存储的。
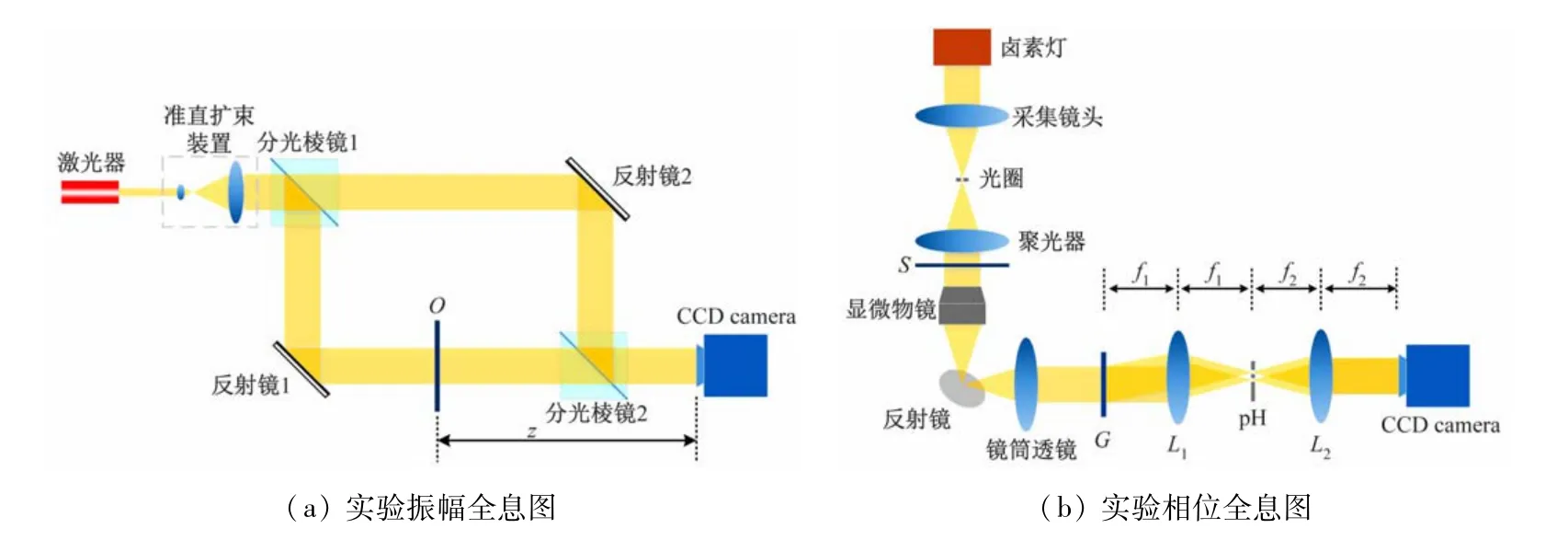
图1 离散数字全息术光路结构
实验中使用的振幅样本和相位样本如图2 所示,通过对这些样品的不同区域进行全息图像采集,得到CCD相机大小(1 024 ×1 280)的全息图,裁剪并制作成分辨率为512 ×512 的全息数据集。

图2 振幅样本和相位样本示意图
2 实验原理
2.1 网络结构
整个网络结构共4 部分(全部由红色虚线框标注),HRU-Net的网络结构如图3 所示,分别是输入全息图、特征提取、特征输出以及输出重建图。
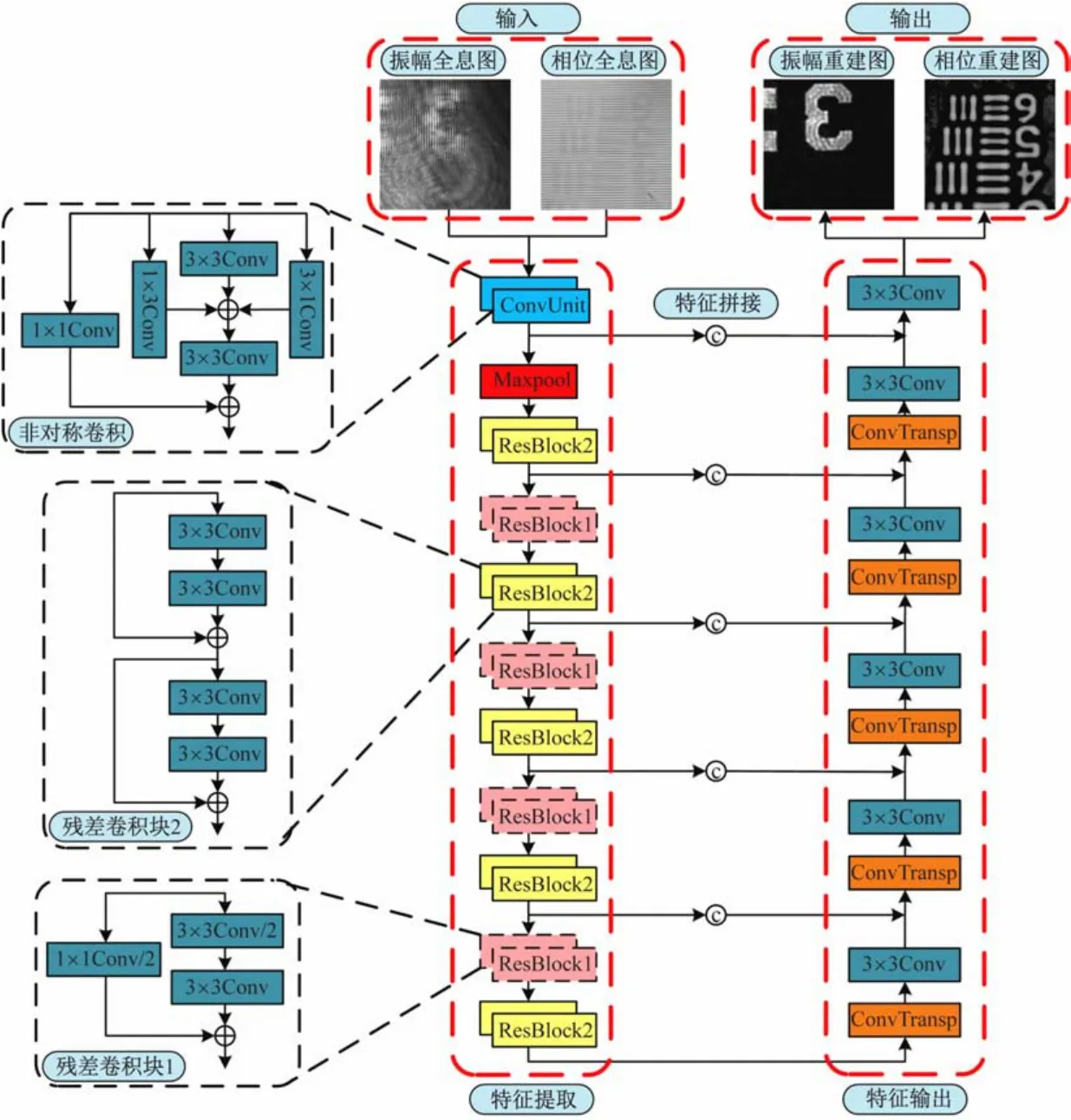
图3 HRU-Net的网络结构示意图
为了增加不同尺度的底层特征信息,更好地重建全息图,本算法引入了非对称卷积结构,通过与残差卷积结合,可以在减少参数和计算量的同时增加非线性因素[10],提高网络结构的表达能力。
由于全息图是16 位整型数据,而重建图是32 位浮点型数据,建立两者之间的像素级映射关系相较于普通数据[11]更复杂,因此网络深度对于全息图像重建任务至关重要。同时为了避免传统卷积神经网络(CNN)[12]的梯度消失/爆炸问题,使用残差卷积块[13]对特征提取部分进行改进,通过融合输入特征与输出特征,加快网络计算速度,增加特征提取效率。残差卷积的公式如下:

考虑到训练时间与实验环境的限制,第1 次降采样采用池化层[14]实现,但是由于池化层只会保留一些主要的特征,如平均值或最大值,以及该主要特征与其他特征之间的相对位置关系,所以会丢失部分特征信息(默认特征图边长减少1/2,特征信息丢失3/4)。因此本算法在后续的降采样中使用残差卷积块1 替代池化层,尽可能地保留输入特征信息。
针对全息图数据较复杂的特性,为了建立像素级映射关系,增加全息图的重建质量,本算法共使用4 次残差卷积块1 和5 次残差卷积块2,整个网络结构总计36 个卷积层[15],极大地增加了网络深度和参数量,提高了网络的泛化能力。
激活函数层有两种实现方式,其中,实验振幅全息图选择ReLU激活函数,其定义为

而实验相位全息图由于重建相位值可能为负,因此选择Leaky ReLU激活函数,其定义为

特征输出主要由转置卷积以及特征拼接两部分构成。其中,为了实现输入输出等分辨率要求,上采样次数应该与降采样次数相同,即5 次,而为了增加转置卷积的稳定性,在每一层转置卷积后增加一层3 ×3 卷积层;为了增加特征的利用率,增加网络重建性能,将降采样的特征图与对称位置上采样的特征图进行特征拼接,增加重建图的分辨率。
2.2 实验环境
本算法的实验环境为Windows 7 旗舰版,电脑配置为CPU(i7-6800K @ 3.40 GHz),GPU(Geforce GTX 1 080,8 GB显存),32 GB 内存;采集到的全息图按照80∶10∶10 的比例随机分成训练集、验证集和测试集;网络的权重和偏置采用Xavier 初始化器进行初始化;考虑到训练时间和实验环境的限制,每次迭代的批大小设置为2;学习率设置为固定学习率0.000 1;网络结构采用TensorFlow 框架实现;优化算法是Adam 优化器;损失函数为MSE,指网络输出和对应标签的均方误差,定义为

式中:U1代表预测结果;U2表示标签。分辨率为m×n。
2.3 评价指标
用于评估图像重建质量的指标分别是PSNR以及SSIM,其中,PSNR指峰值信噪比,其典型值一般在30~40 dB之间;SSIM 是结构相似度,其典型值一般在-1~+1 之间,
式中:x和是实像和重建图像;C1和C2是常数。
3 实验分析
3.1 实验振幅全息数据
本算法使用的振幅实验数据样本是USAF1951 分辨率板的不同区域。使用角谱法和余弦分值自动聚焦算法来重建和聚焦全息图,使用聚焦重建图像直接作为准确的标签。部分测试结果如图4 所示。图中,(a)~(d)为全息图;(e)~(h)为对应的标签;(i)~(l)为Holo-UNet网络输出;(m)~(p)为本算法的网络输出。结合主观评价和评价指标。可以看到,本算法网络输出的重建质量较好,拥有清晰的边缘和更多细节(见表1)。
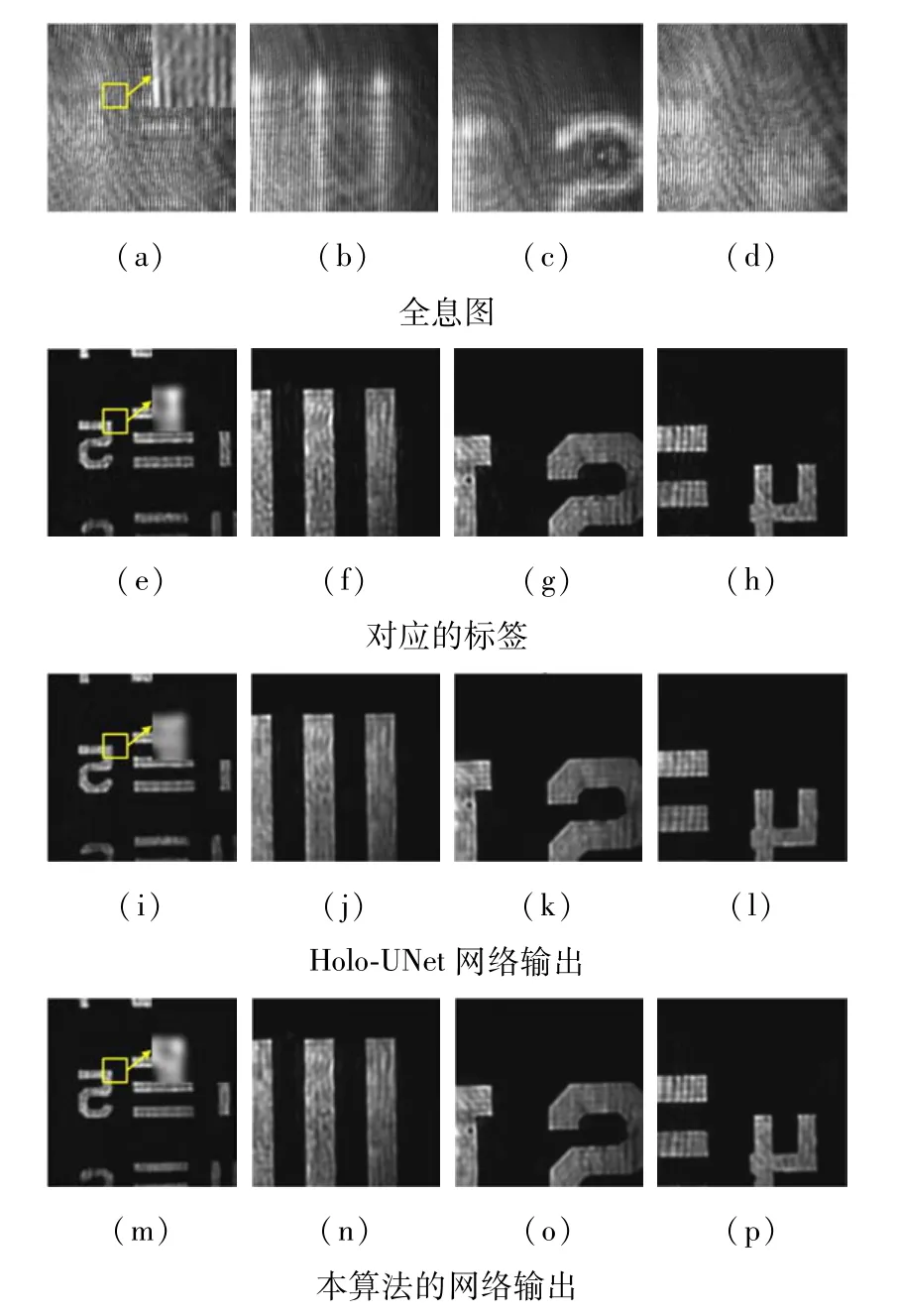
图4 振幅实验全息数据测试结果
3.2 实验相位全息数据
本算法使用的相位实验数据样本是不同区域的血红细胞、相位板、HeLa细胞和相位分辨率板。同样地,使用聚焦重建图像直接作为准确的标签。与振幅实验数据不同的是,由于相位实验数据的相位值可能是负值,Leaky ReLU 激活函数比ReLU 激活函数更有效。部分测试结果如图5 所示。图中:(a)~(d)为全息图;(e)~(h)为对应的标签;(i)~(l)为Holo-UNet网络输出;(m)~(p)为本算法的网络输出。结合主观评价和评价指标,可以看到本算法网络输出的重建质量较好,拥有清晰的边缘和更多的细节(见表1)。
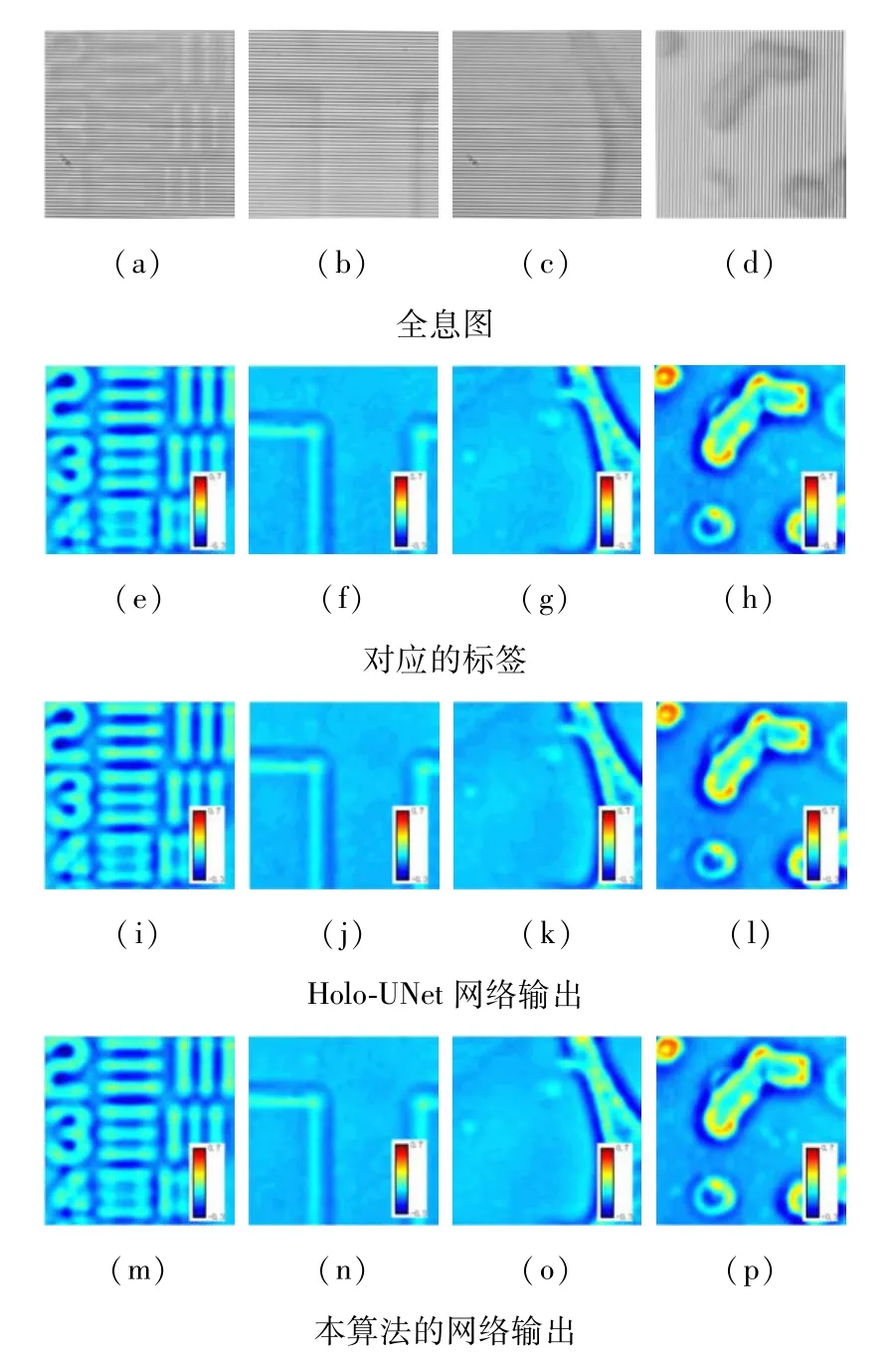
图5 相位实验全息数据测试结果
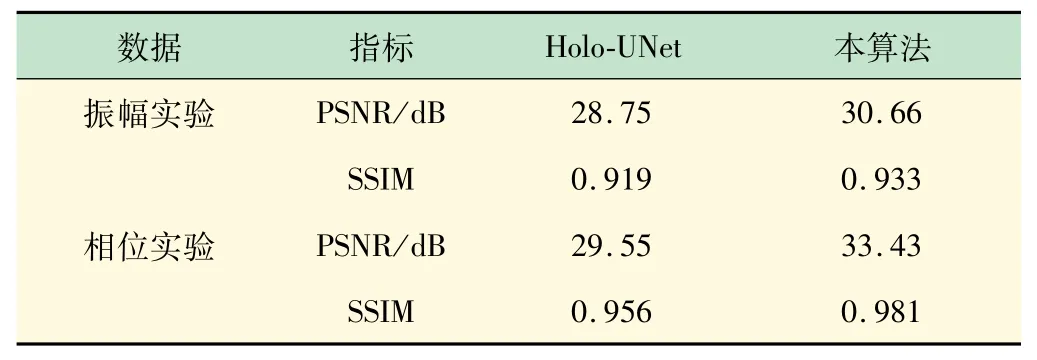
表1 不同样本的测试集性能指标
为了深入分析相位恢复的准确性以及全息重建的质量,从测试集中任选一张图对其标有红色虚线的部分进行剖线对比,结果如图6 所示。结合剖线对比图可以再次看出,输出结果与标签结果完全一致,具有较低的相位恢复噪声。图中:(a)为全息图;(b)为对应的标签;(c)为Holo-UNet 网络输出;(d)为本算法的网络输出;(e)和(g)是(b)分别与(c)和(d)在坐标248 的剖线拟合图,(f)和(h)是(b)分别与(c)和(d)的相位误差图。结合主观评价和评价指标,可以看到本算法网络输出的重建质量较好,拥有清晰的边缘和更多的细节。
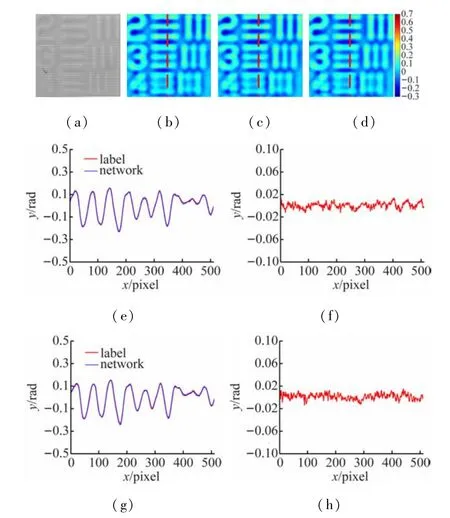
图6 相位实验全息数据剖线对比图
4 结论
本文提出了一种端到端(输入单张全息图,输出单张重建图)的深度神经网络重建框架HRU-Net,用于实现离轴数字全息的图像重建。通过实验振幅图像与实验相位图像对算法进行验证,并引入了优化模块进一步提升算法在图像重建方面的有效性。同时,本算法解决了全息图的分辨率受硬件限制的问题,且在没有先验知识和额外全息图的情况下完成了高质量的图像重建,使得三维测量变得更加方便。除此之外,本算法与Holo-UNet相比,峰值信噪比和结构相似度度更高,有望应用在粒子追踪、超分辨率和无损压缩等多个领域。
办好期刊,用好期刊,提升理念,推进实验室的创新与发展!
