基于SOLIDWORKS与ADAMS的推送料机械系统仿真分析
2021-12-08陆武慧
陆武慧

摘 要:推送料机构作为自动化生产线上重要的构成部分,文中将推送料机构简化为两个曲柄滑块机构构成的机械系统,共同完成自动线对物料的推送过程。针对自动化生产线上推送料关键运动机构,在SOLIDWORKS软件中,建立三维模型,导入到ADAMS软件中通过添加运动副约束,建立出推送料机械系统的虚拟样机模型,通过仿真分析,得到物料的质心运动情况,为实际物理样机的生产和进一步优化提供参数依据。
关键词:推送料;机械系统;仿真;ADAMS
中图分类号:TP24;TP391.9 文献标识码:A 文章編号:1001-5922(2021)11-0136-04
Simulation Analysis of Feeding Mechanical System Based on SOLIDWORKS and ADAMS
Lu Wuhui
(School of General Aviation, Xi an Aeronautical Polytechnic Institute, Xi an 710089, China)
Abstract:As an important constituent of the automatic production line, the push material mechanism is simplified to a mechanical system composed of two crank slider mechanisms to jointly complete the push process of the automatic line to materials in this paper. For the key movement mechanism of the push material on the automatic production line, a 3D model is established in the SOLIDWORKS software and imported into the ADAMS software to establish a virtual prototype model of the motion auxiliary constraint by adding the push material mechanical system. Through simulation analysis, the center of mass motion provides parameter basis for production and further optimization of actual physical prototype.
Key words:push material; mechanical system; simulation; ADAMS
随着经济的发展和科技的不断进步,自动化产品设计越来越得到客户青睐,成为现代生产的主要手段。随着自动化生产线被广泛地应用在国民经济的各个领域,从航空航天、交通运输、机械电子、医疗器械再到生活中的汽车、家电行业、包装行业,产品物料的传送由原来的人工放置过渡到采用机器人或者机械手所代替,目前有对电池盖板自动上料机构进行设计[1]。基于伺服系统的开卷自动线送料系统的方案设计及送料系统的构成研究[2],对易撕盖盖圈送料机构进行建模和运动仿真的研究[3],在不同角度进行了自动线上料机构的研究。自动化生产线的使用不仅可以改善工人的作业环境,还可以减少生产中的失误率和危险性,提高了生产效率、产品质量和材料的利用率等。推送料机构是自动化生产线上重要的一个环节,自动化生产线是根据工艺顺序自动完成全部或部分制造过程的生产系统,传统的推送料过程,往往采用人工送料模式,将板料依次放置在上料平台上,这种手动上料的方式导致生产效率低、产品数据统计错乱等问题,也不能满足迅猛的发展需求和客户的生产效率。采用推送料机构不仅提高了生产效率,还避免人工参与生产所产生的统计失误、危险、误操作等。
1 推送料机械系统运动学分析
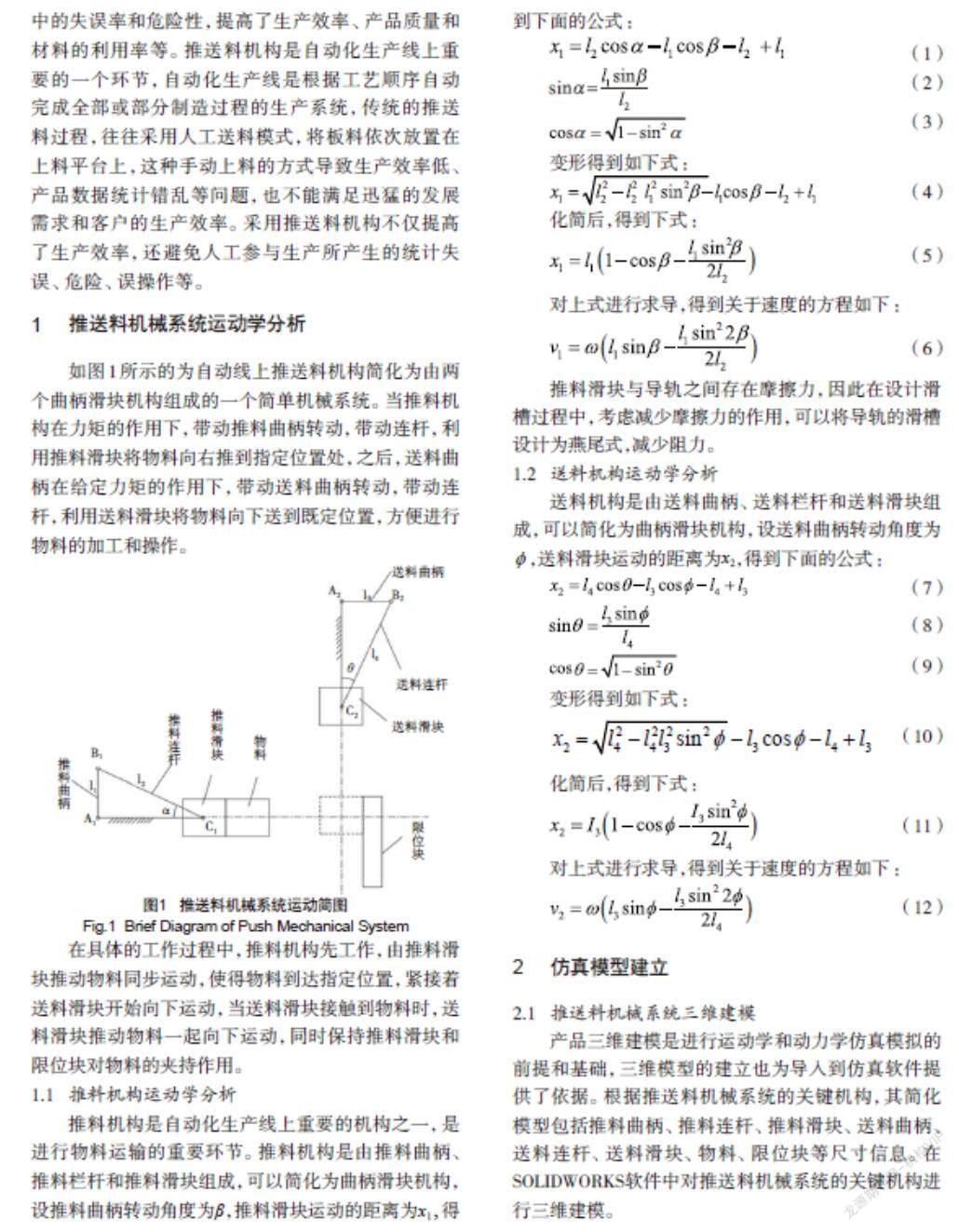
如图1所示的为自动线上推送料机构简化为由两个曲柄滑块机构组成的一个简单机械系统。当推料机构在力矩的作用下,带动推料曲柄转动,带动连杆,利用推料滑块将物料向右推到指定位置处,之后,送料曲柄在给定力矩的作用下,带动送料曲柄转动,带动连杆,利用送料滑块将物料向下送到既定位置,方便进行物料的加工和操作。
在具体的工作过程中,推料机构先工作,由推料滑块推动物料同步运动,使得物料到达指定位置,紧接着送料滑块开始向下运动,当送料滑块接触到物料时,送料滑块推动物料一起向下运动,同时保持推料滑块和限位块对物料的夹持作用。
1.1 推料机构运动学分析
推料机构是自动化生产线上重要的机构之一,是进行物料运输的重要环节。推料机构是由推料曲柄、推料栏杆和推料滑块组成,可以简化为曲柄滑块机构,设推料曲柄转动角度为β,推料滑块运动的距离为x1,得到下面的公式:
变形得到如下式:
化简后,得到下式:
对上式进行求导,得到关于速度的方程如下:
推料滑块与导轨之间存在摩擦力,因此在设计滑槽过程中,考虑减少摩擦力的作用,可以将导轨的滑槽设计为燕尾式,减少阻力。
1.2 送料机构运动学分析
送料机构是由送料曲柄、送料栏杆和送料滑块组成,可以简化为曲柄滑块机构,设送料曲柄转动角度为,送料滑块运动的距离为x2,得到下面的公式:
变形得到如下式:
化简后,得到下式:
对上式进行求导,得到关于速度的方程如下:
2 仿真模型建立
2.1 推送料机械系统三维建模
产品三维建模是进行运动学和动力学仿真模拟的前提和基础,三维模型的建立也为导入到仿真软件提供了依据。根据推送料机械系统的关键机构,其简化模型包括推料曲柄、推料连杆、推料滑块、送料曲柄、送料连杆、送料滑块、物料、限位块等尺寸信息。在SOLIDWORKS软件中对推送料机械系统的关键机构进行三维建模。
当前,虚拟样机技术广泛应用于机械制造、设计研发等多个领域,它充分借助计算机软件,建立产品和设备的三维实体模型,在三维模型的基础上,完成运动学和动力学模型的仿真模拟,为产品的设计、研发和制造提供基础和依据。通过在计算机软件上建立虚拟样机,对其动力学模型进行仿真计算、分析和优化,用仿真的方式创新了传统实际样机的试验环节[4-6]。
2.2 推送料机械系统虚拟样机模型建立
动力学仿真软件ADAMS,不仅可以作为机械系统进行运动学和动力学仿真分析的工具,而且它具备多种接口,可以作为虚拟样机的开发工具,适合多种开放性程序类型,为产品和设备样机的二次开发提供平台和基础[7-8]。
通过动力学软件ADAMS建立推送料机械系统的虚拟样机模型,为其进一步分析运动轨迹做好铺垫。在推送料机械系统的三维建模建立基础之上,导出成ADAMS软件能够读取的parasolid格式,在动力学软件ADAMS中导入该格式的推送料机械系统三维模型,对三维模型进行约束添加[9-10]。
具体添加以下约束:(1)在推料曲柄和电机之间建立旋转副,形成铰链;在推料曲柄和推料连杆之间建立旋转副,形成铰链;在推料连杆与推料滑块之间建立旋转副,形成铰链;在送料曲柄和电机之间建立旋转副,形成铰链;在送料曲柄和送料连杆之间建立旋转副,形成铰链;在送料连杆与送料滑块之间建立旋转副,形成铰链。(2)推料滑块与导轨之间建立移动副;送料滑块与导轨之间建立移动副。(3)由于要求物料在被推动向右运动但没有达到要求位置时,送料机构不能运动,所以需要在送料曲柄和大地之间创建1个固连副,限位块与地面之间创建1个固连副。(4)在推料滑块与物料之间创建1个碰撞力,用于当物料被送料机构推动向下运动时,对物料的水平运动进行限制;在送料滑块与物料之间创建1个碰撞力,用于推动物体向下运动;在物料与限位块之间创建1个碰撞力,用来限制物料的水平向右运动。
对三维模型进行约束添加之后,从而建立起推送料机械系统的动力学模型,如图2所示。
3 模型仿真分析
3.1 仿真过程描述
为了实时得到碰撞力,需要创建传感器,来感知物料质心位置和滑块与物料之间碰撞力。在创建仿真过程中,动力学仿真描述的语句为:SIMULATE/DYNAMIC, END=2.5,STEPS=1000;在执行仿真过程中,推料机构推动物料向右运动,而送料机构不动,当物料质心到达指定位置时,传感器感知到状态,并中断当前的仿真,送料机构开始运动,同时要解除感知质心的传感器的作用,从而送料机构才可以开始运动。为此,添加动力学仿真语句:SIMULATE/DYNAMIC, END=2.5,STEPS=1000;在此过程中,虽然感知质心的传感器不再起作用,但由于推料机构和限位块的共同作用,物料仍会保持在设定的位置不动。
当送料机构运动到一定位置时,送料滑块与物料接触产生碰撞力,当该碰撞力达到或者超过50 N,感知碰撞力的传感器发挥作用,中断当前动力學仿真,接下来,物体在送料滑块的推动下要向下运动,需要解除物料与推料滑块之间固连副作用,所以还需要添加仿真描述语句,得到完整的仿真描述语句如图3所示。
选择Simulate\Scripted Controls菜单项,在Simulation Control 对话框中右击Simulation Script Name文本框,在快捷菜单中选择建模和定义号的文件夹名称为Simulation_Script\Guesses\MODEL_sensor.SIM_SCRIPT_1;单击Start Simulation工具按钮,即开始执行仿真过程描述,模型的仿真过程如图4所示。
3.2 验证机构合理性
根据推送料机械系统的机构实际运动过程,对推送料的机构进行运动学仿真计算,测得物料在整个仿真过程中质心位置的变化过程,也是物料质心的运动轨迹。以物料的质心为研究点,其位移曲线平稳流畅,如图5所示,速度曲线光滑平稳,具有周期性,如图6所示。在推送物料的整个过程中,运行过程平稳无死点,验证了推送料机构采用两个曲柄滑块机构的合理性。
通过分析,我们发现,物料在最初的一段时间内,质心运动轨迹Y方向的数值不变,此阶段,是由推料机构推动物料向右移动。因此,Y方向的质心位移不发生变化,直到物料向右运动到指定位置后,送料机构开始运动,在送料滑块的作用下,将物料向下传送,这个时候,物料质心Y方向的位移发生变化。对于质心运动轨迹的速度曲线,速度平稳,呈周期性,在推料机构推动物料向右移动的过程中,类似于匀加速运动。送料机构开始运动,在送料滑块的作用下,速度方向发生改变,直到传送到指定的位置,完成推送动作,符合工程实际情况,也为进一步优化推送料机构提供了参数依据。
4 结语
通过动力学软件ADAMS对推送料机械系统进行三维模型和动力学仿真模型建立,并得出了物料质心的运动轨迹曲线和运动速度曲线,符合工程实际情况。仿真结果表明:在推送物料的整个过程中,运行过程平稳无死点,验证了推送料机构采用两个曲柄滑块机构的合理性,证明仿真的正确性。利用动力学分析软件实现了对推送料机械系统的仿真分析研究,有助于提高产品设计的准确性,为进一步优化推送料机械系统提供了参数依据和基础。
参考文献
[1]刘军华. 电池盖板自动上料机构设计[J]. 焊接,2017(11):65-68+72.
[2]张友兵,舒章钧,史旅华,等. 基于伺服系统的开卷自动线送料系统[J]. 制造技术与机床,2005(08):43-47.
[3]唐静静,阮竞兰,刘 乘. 易撕盖盖圈送料机构的建模及运动仿真[J]. 包装与食品机械,2011,29(06):35-38.
[4]申团辉,冯静安,王卫兵,等. 基于ADAMS的移栽机末端执行器虚拟设计及参数优化[J]. 机械设计,2019,36(10):46-51.
[5]李 涛,陈光耀,张志猛. 基于Matlab/Simulink的整车ABS控制算法仿真研究[J]. 粘接,2020,42(06):82-85+104.
[6]张金铮,王 琪,金琦淳,等. 基于ADAMS的三角履带机构动力学仿真分析[J]. 江苏科技大学学报(自然科学版),2019,33(02):56-61.
[7]李海岗,司景萍,吴喜骊,等. 基于ADAMS的矿用车举升机构仿真研究[J]. 煤矿机械,2019,40(02):160-162.
[8]王飞雁,范元勋. 基于无急回特性扇门装置的优化设计及仿真[J]. 机械制造与自动化,2019,48(02):98-100+104.
[9]黄 妮,戴作强. 基于间隙误差的HCPE运动精度仿真分析[J]. 机械制造与自动化,2019,48(06):86-89.
[10]李海军,王 雷,方轶. 基于ADAMS的内埋式导弹发射俯仰角变化仿真分析[J]. 液压与气动,2020(01):159-162.