特低渗透油藏抽油决策优化模型
2021-11-27宋新爱刘天时魏航信李国玮
宋新爱,刘天时,魏航信,李国玮
(1.西安石油大学 计算机学院,陕西 西安 710065;2.西安石油大学 机械工程学院,陕西 西安 710065;3.中国石油集团测井有限公司 生产测井中心,陕西 西安 710200)
引 言
特低渗透及致密油藏在我国所占比例越来越大,国内大部分油田已处于后期开发阶段,油田单井产量低,甚至小于1 m3/d。如果采用常规方法采油,抽油机经常处于轻载状态,造成“大马拉小车”,甚至出现空抽。不同学者从不同角度对抽油机间抽方法及采油制度优化进行了研究,以提高抽油效率、节约用电、降低生产成本。例如通过改进的蚁群优化算法确定间抽时间[1];应用抽油机专用变频控制器,有效降低中、低产抽油机井系统能耗[2];研发停机间抽装置,提出停泵不停机间抽优化技术,泵效和有功节电率分别提升32%和50.7%[3];通过监测油井液面、沉没度变化曲线、示功图变化特征以及测量抽油杆负载变化情况等确定低产低效井间抽工作制度[4-7]。从文献中可以看出,常规油井间抽制度主要通过研究IPR曲线或者油井动液面-时间恢复曲线特性,结合示功图特征确定停抽和启抽时间,另外还有利用动液面和套压检测仪通过抽油机变频器和井口电磁阀实现最佳抽油冲次[8]等技术。它们都在不同程度上提高了抽油效率,有着良好的节能效果,但是抽油机频繁启停会造成机械设备、油井杆管、抽油机皮带磨损等问题,而且在实际生产过程中抽油机的启停时间还受到多方面因素的影响。针对上述问题,本文提出基于径向基函数(Radial Basis Function,RBF)神经网络优化抽油决策模型,实现抽油机间抽速度控制。
1 抽油机控制系统结构
在传统的抽油机电机转速控制方法中,往往采用变频调速控制器。变频电机可以动态调节抽油机的冲次、上下行速度,以此来降低电机转速,减少抽取频次。变频器是一个很强的电磁干扰源,在变频过程中逆变时会产生较多的高次谐波干扰电网,甚至造成电网瘫痪。近年来,开关磁阻电机(Switched Reluctance Motor,SRM)凭借结构简易、容错能力强、可靠性高以及调速性能好等优点已在抽油系统中得以应用,是目前较为理想的驱动系统。
在如图1所示的抽油机控制系统结构中,SRM速度控制通常采用单片机、数字信号处理器等高速性能器件完成[9]。控制器根据当前抽油机工况,采用优化抽油算法获得合理的电机转速,并将转速控制信号发送给SRM,进而控制抽油机处于最佳工作状态。控制器的输入端需要考虑地层、油井及抽油泵的工作参数对抽油制度进行影响和制约。针对目前普遍采用的人工间抽制度,控制器的输出主要包括电机转速、阈值转速和停抽时间,合理地控制输出可使抽油机处于最佳工作状态。因此考虑现有的海量抽油机历史间抽工作数据,以及人工神经网络具有处理不确定性信息的能力及自学习、自组织和自适应的特征,可采用人工神经网络实现间抽制度优化。
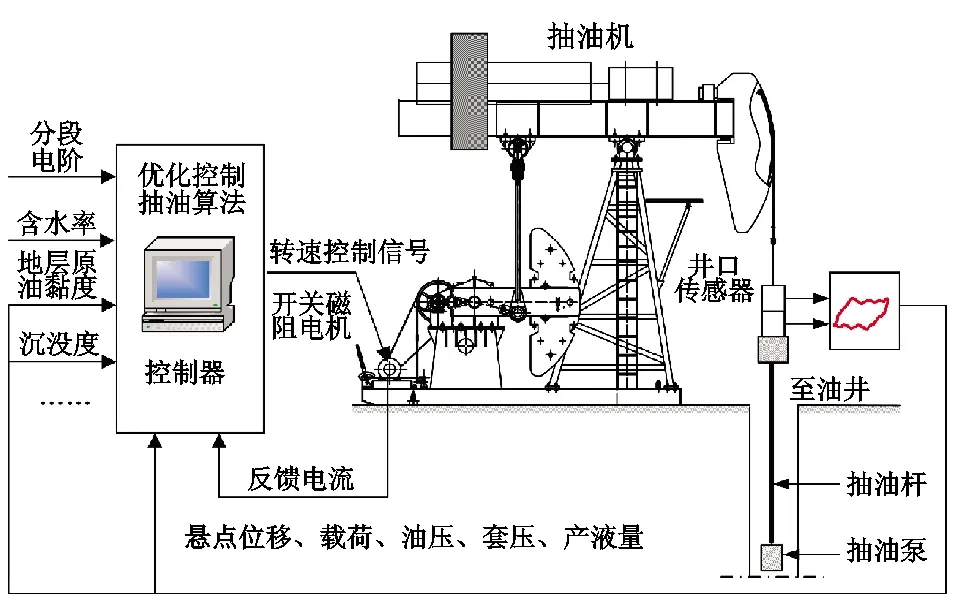
图1 抽油机控制系统结构
2 抽油决策模型
2.1 决策影响因子
如图1所示,在抽油机工作过程中,需要考虑各种可能影响效能的因素,以确定合理的工作制度,如电机电流、沉没度、含水率、地层原油黏度、抽油泵泵径、抽油机冲程、产液量、分段电价以及油井的渗透率等,这些因素都直接影响着抽油机的相关工作参数。
(1)电机电流
由于SRM存在最小转速,所以抽油过程存在两种状态:连续抽油状态和间歇抽油状态。抽油机所处状态由抽油机电机转速与阈值转速确定。阈值转速大于等于电机最小转速并且小于电机最大转速,是抽油机在连续抽油状态的最低转速。电机电流增大表明抽油量增大,电机转速需要加快;反之,电机转速应该减慢。
(2)沉没度
为了分析沉没度对抽油机悬点载荷产生的影响,建立抽油机悬点最大载荷模型:
(1)
(2)
(3)
(4)
式(1)—(4)中:s为光杆冲程,m;n为光杆冲次,min-1;r为曲柄半径,m;l为连杆长度,m;r/l一般为0.25;Wl′为全柱塞面积上作用的液柱载荷,N;Wr′为抽油杆在井液中的浮重,N;Wr为抽油杆在空气中的重量,N;d为抽油杆直径,m;D为抽油泵柱塞直径,m;ρr为抽油杆密度,kg/m3;ρl为井下液体密度,kg/m3;Hf为沉没度,m;L为下泵深度,m。根据式(2)可知,沉没度Hf增大,液柱载荷减小,抽油机悬点最大载荷减小,因此可以增大电动机转速。
(3)含水率
原油中含水率增大,液体密度增大,根据式(2)可以看出,液柱载荷增加,但根据式(3),抽油杆在井液中的重力减小,二者共同作用。悬点载荷变化计算如下:假定含水率从0.3增加到0.4,当抽油泵公称直径为38 mm,下泵深度为1 500 m,沉没度为100 m,抽油杆直径为19 mm,抽油杆密度为7 800 kg/m3时,可以计算出液柱载荷增加了233 N,抽油杆在液体中的重量减小了62.6 N。因此可看出,原油中含水率增大,悬点载荷增加,因此控制电机降速运转将会起到节能增效的作用。
(4)地层原油黏度
原油黏度增加,抽油泵柱塞与泵筒阻尼力增加,原油与油管管壁摩擦力增加,导致悬点载荷变大,电机转速变慢。
(5)抽油泵泵径
根据式(2)可以看出,抽油泵泵径越大,抽油泵柱塞作用面越大,原油对柱塞的作用力越大,导致悬点载荷增加,应控制电机转速变慢。
(6)抽油机冲程
根据式(1)可以看出,抽油机冲程越大,悬点载荷越大,应控制抽油机电机转速变慢。
(7)产液量
在有杆泵系统采油时,油井产液量越大,需增加抽油机冲次,以便将井内原油尽快采出。根据式(1)可以看出,当冲次增大时,悬点载荷增大,但增加幅度很小,而考虑的主要因素是提高系统效率,因此需要增加抽油机电机转速。
除此之外,井口油压和套压对悬点载荷也有一定影响。井口油压很低,因此可以忽略不计。油田现场通常将套管内的天然气排放掉,套压接近零。另外,由于油田现场在不同时段的电价不同,可以考虑控制抽油机在低电价时段进行工作。
2.2 RBF神经网络模型及参数设置
(1)RBF神经网络结构
通过对以上抽油机电机转速决策影响因子进行分析,可知它们与控制系统输出之间存在非常复杂的非线性关系,不能通过显函数表示,这属于多因素优化问题。因此可用人工神经网络对海量历史数据进行自学习,以获得合理的网络结构,进而用于优化抽油决策,使抽油机处于最佳的工作状态。
如图2所示,RBF神经网络是一个具有单隐层的3层前馈网络,输入层由信号源节点组成,隐含层的节点数依据所要描述的问题而定,输出层是对输入模式作出的响应。由于RBF神经网络是一种局部逼近网络,学习速度快,可在一定程度上满足油田现场工作实时性需求。

图2 RBF神经网络结构
激活函数可以使神经网络任意逼近任何非线性函数,最常用的RBF神经网络的激活函数为高斯核函数[10],表示式为:
(5)
其中,Xs表示作用于网络的第s个输入向量,s=1,2,…,N;Cp和σp表示第p个隐含层节点径向基函数的中心参数和扩展常数,p=1,2,…,k。由式(5)可知隐含层节点的输出范围为[0,1],并且输入样本越接近中心,输出值越大。网络输出为:
(6)
其中,yq为输出层第q个节点的输出,q=1,2,…,m;wqp为第p个隐含层节点与第q个输出层节点之间的权值。
(2)网络参数设置
通过对决策模型影响因素进行分析,可以选取以上7个决策因子作为RBF神经网络的输入层,即输入层节点数n为7。采用径向基函数作为隐含层神经元的“基”构成隐含层空间,隐含层节点数k小于或等于训练样本数。本文采用动态k-均值聚类方法确定k值。输出层为抽油机的电机转速、阈值转速和停抽时间,即输出层节点数m为3。
①确定输入向量
Xs=[x1,x2,…,x7]T。
(7)
其中,Xs为网络的第s个输入,s=1,2,…,N,N为训练样本数。
②确定实际输出向量和目标输出向量
Ys=[y1,y2,y3]T,
(8)
Os=[o1,o2,o3]T。
(9)
其中,Ys和Os分别为网络的实际输出和目标输出。实际输出量为“神经网络预测的电机转速增量、阈值转速、停抽时间(减小)的预测值”,目标输出量为现场收集的电机转速增量、阈值转速、停抽时间增量的经验值。
③初始化隐含层至输出层的连接权值[11]
Wq=[wq1,wq2,…,wqp]T,
(10)
(11)
其中,wqp表示第p个隐含层节点至第q个输出层的权值,p=1,2,…,k,q=1,2,3。minoq和maxoq分别是训练样本集中第q个输出节点中所有目标输出的最小值和最大值。
3 RBF神经网络模型训练算法
RBF神经网络训练的目的是确定参数,包括隐含层基函数的中心、扩展常数以及隐含层到输出层的权值。通常根据所要描述的问题主要依靠经验来确定隐含层的节点数。根据径向基函数中心选取方法的不同,RBF神经网络有多种学习方法[12-13]。在已知全部输入向量时,采用k-均值聚类法能够比较精确地确定隐含层中心,但在实际应用中难度较大。
3.1 动态确定隐含层基函数中心
本文采用的动态k-均值聚类方法,根据输入样本动态增加k值,调整RBF神经网络隐含层中心。算法步骤如下:
(1)当s=1时,将第一个输入样本作为隐含层第一类基函数中心向量,即C1=X1。
(2)当s≥2时,计算第s个样本Xs距当前所有聚类中心C1,…,Ck的距离,欧氏距离公式为:
(12)
其中,p=1,2,…,k,求出最小距离为:
dmin=mind(sp)。
(13)
(3)将dmin与距离阈值R进行比较,当dmin≤R时,将Xs归入与Cp对应的子类,重新计算该子类均值作为新的中心Cp,计算公式为:
(14)
其中,Sp表示第p个样本子集,Nsp表示Sp中的样本个数。转至步骤(5)。
(4)当d(sp)>R时,将Xs作为新增的聚类中心,即C(p+1)=Xs。
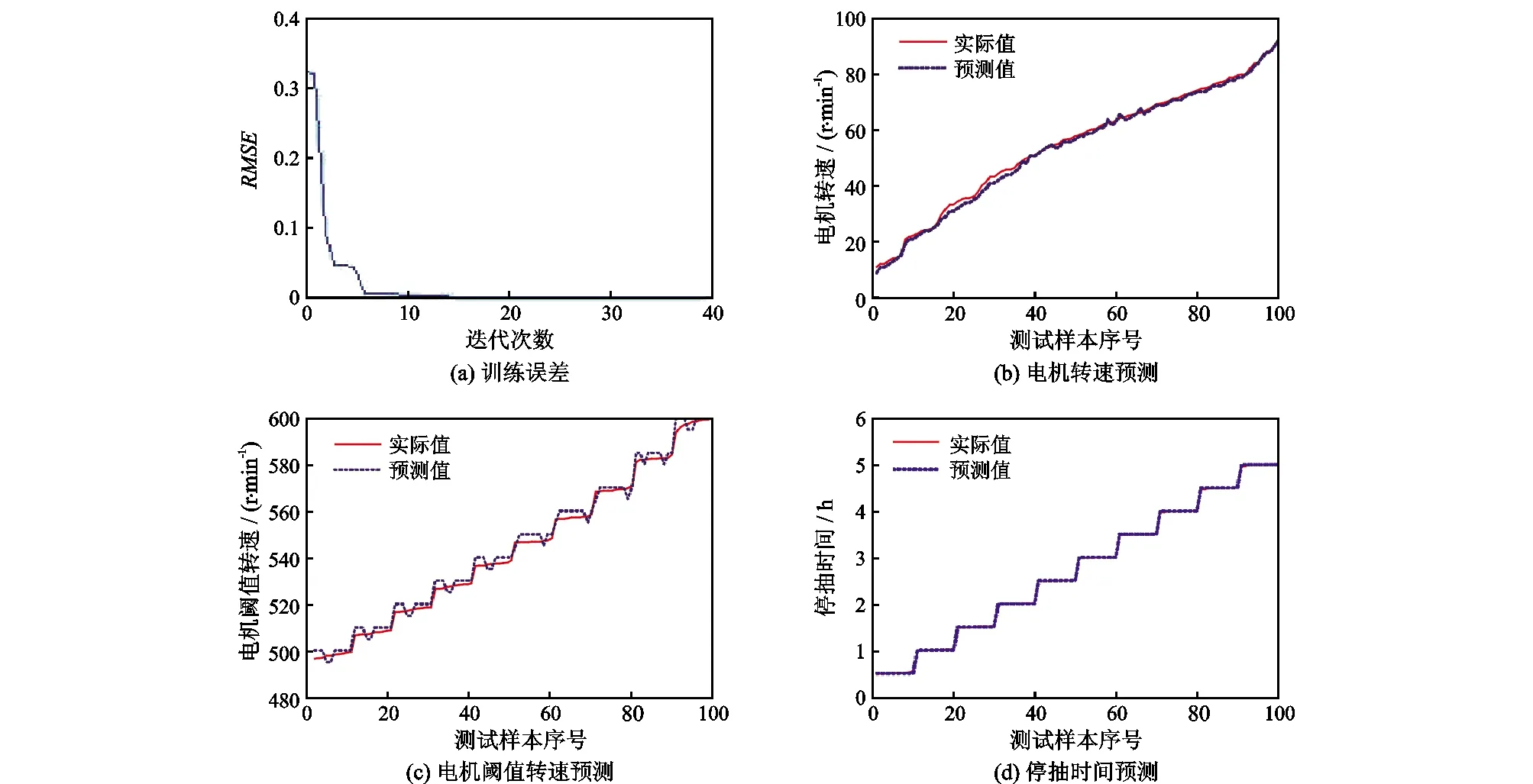
(5)令s=s+1,若s RBF神经网络隐含层节点的扩展常数为聚类中心与属于该子类的样本之间的距离的均值,通常采用均匀宽度,计算公式为: (15) 其中,Dmax为所有Cp两两之间距离的最大值,p=1,2,…,k,k为隐含层节点数。 采用局部梯度下降法,通过迭代训练获得满足系统训练误差的网络权重。算法步骤如下: (1)当t=0时,设置初始权值wqp(0)=0,根据系统精度要求设置网络训练误差E。 (2)当t=1时,利用公式(11)得到wqp。 (3)利用式(5)、(6)、(15)得到第q个输出节点的实际输出值yq。 (4)采用均方根误差RMSE作为RBF神经网络评价函数,计算公式为: (16) 其中,Ys和Os分别为第s个输出节点的实际输出和目标输出。 (5)当RMSE>E时,令t=t+1,即迭代计算新的权值,计算公式为: (17) 其中,η为自适应学习速率,通常选取为0.01~0.8。当η取值较大时可能会降低系统稳定性,而当η太小则导致收敛太慢。α为前两次权值变化调整系数,通常取0.5~1。获得wqp(t)后转至步骤(3)。 (6)当RMSE≤E时,算法结束。此时wqp(t)即为RBF网络权值。 根据现场经验,收集所需样本数据,部分样本数据见表1。样本输入向量为电流增量、产液量增量、沉没度、含水率、原油黏度、泵径、冲程。输出向量为电机转速增量、阈值转速、停抽时间增量。在设计训练数据库时,根据延长油田的现场情况,电流值增量为1~10 A,产液量增量为0.1~1 m3/d,沉没度为10~100 m,含水率为0.2~0.8,地层原油黏度为5~10 mPa·s,抽油泵泵径为Φ32 mm、Φ38 mm、Φ44 mm,抽油机冲程为1.5 m、1.8 m、2.1 m、2.5 m、3.0 m。由于产液量对停抽时间影响较大,而产液量为增量,因此神经网络的输出参数“停抽时间”以增量表示。 表1 决策模型样本数据 根据RBF神经网络性能特点,考虑到样本过多会造成隐层节点数增加,影响训练速度和精度。因此确定采集样本数量为2 000,将95%的数据用于训练神经网络,其余5%数据用于网络验证,观察网络的预测值与实际值的误差,训练使用的输入向量及对应目标输出向量为从油井现场采集的数据样本集。利用Matlab工具对RBF神经网络进行训练得到满足精度要求的网络参数,进而对测试样本进行仿真。 (1)采用最大最小法进行样本归一化处理。归一化函数为mapminmax,参数可使用默认最小值和最大值。 (2)构建和训练三层径向基神经网络,采用3.2节中的动态k-均值聚类方法在创建过程中增加隐含层节点个数。通过多次迭代得到隐含层节点权值,直到满足输出误差。实验分别设置输出误差E为0.000 5和0.000 1,得到两种网络参数,可用于仿真测试对比训练效果。 (3)使用测试样本对网络进行仿真,图3和图4分别为均方误差为0.000 5和0.000 1时的仿真结果。分别经过40次和300次训练,输出误差达到精度要求。当E=0.000 1时,网络输出的电机转速、电机阈值转速和停抽时间预测值更接近实际值。 图3 E=0.000 5时的RBF神经网络仿真结果 图4 E=0.000 1时的RBF神经网络仿真结果 通过采用RBF神经网络对抽油机的实时工作状态进行调整,使抽油机的电机转速、阈值转速、停抽时间达到最优状态,实现了神经网络对抽油机决策模型的优化。 (1)分析了抽油机自动控制系统中抽油决策模型的影响因子,选取电流增量、产液量增量、沉没度、含水率、原油黏度、泵径、冲程作为决策模型的输入量。设置抽油机电机转速增量、阈值转速、停抽时间增量作为决策模型的输出量。 (2)针对优化抽油决策模型,设置了3层RBF神经网络参数;提出了动态k-均值聚类算法,以获取RBF神经网络的隐含层中心;研究了RBF神经网络权重训练算法。采用RBF神经网络优化抽油算法,获得最佳抽油机电机转速、电机阈值转速和停抽时间,从而优化了抽油决策模型。 (3)以油田的海量抽油机历史间抽工作数据作为训练样本和测试样本,对神经网络进行仿真。实验结果表明,RBF神经网络能够快速学习,用于优化抽油决策是合理可行的,可达到抽油机节能降耗的目的。3.2 计算扩展常数
3.3 迭代训练RBF神经网络权重
4 模型仿真实验


5 结 论
