四旋翼无人机的旋翼空气动力学建模与仿真
2021-11-19向朝兴
向朝兴,茅 健
(上海工程技术大学机械与汽车工程学院,上海 201620)
1 引言
进入21世纪以来,随着控制技术、计算机技术、微型传感器技术、无刷电机技术等领域的迅速发展,多旋翼无人机因具有可空中悬停、垂直起降的优点,能适应于狭小的飞行空间,具有较为广泛的应用前景。多旋翼无人机是一个时变非线性、存在着欠驱动、强耦合的系统,重力及陀螺效应对其影响比较大,而且容易受到外部环境变化的影响,使得模型的气动参数获取较为困难,因此难以建立起精确的数学模型[1]。
旋翼的空气动力学模型能够有效反映出多旋翼无人机的飞行状态,因此建立起多旋翼无人机精确的旋翼空气动力学模型至关重要。旋翼桨叶设计是基于动量叶素法[2,3],将桨叶分割成有限个叶素,对每个叶素气动特性进行气动结构优化设计,最后得出旋翼空气动力学模型。文献[4]利用动量、叶素理论计算了翼型的拉力和扭矩,并对旋翼飞行器的低雷诺数空气动力学特性、数学模型以及姿态进行了研究。文献[5]以Eppler387翼型作为分析对象,以不同雷诺数获取对应不同迎角的升力系数、阻力系数和升阻比,来分析旋翼动力学性能。文献[6]基于动量叶素理论分析了旋翼随迎角改变的气动特征。文献[7]对旋翼流场进行了演示试验,分析了悬停状态下微型旋翼无人机螺旋桨的气动特性和旋翼的悬停性能。文献[8]设计了一套求解旋翼无人机空气动力学问题的数值模拟计算方法,该方法能有效地模拟旋翼与机身的相对运动。文献[9]针对四旋翼飞行器姿态稳定性优化控制进行研究,建立了四旋翼飞行器非线性动力学模型。文献[10]以四旋翼无人机Qball-X4 为研究对象构建其非线性动力学模型,从而研究无人机的姿态控制。
针对目前旋翼空气动力学在无人机稳定性方面研究的不足,本文基于数值模拟方法,对四旋翼无人机建立了旋翼空气动力学模型,搭建数值化的仿真平台,对无人机的飞行状态、姿态角的变化进行了分析,得出了旋翼空气动力学系数与稳定性的关系,为解决四旋翼无人机飞行过程中稳定性的问题提供了依据。
2 旋翼空气动力学模型
2.1 建立坐标系
准确描述无人机的飞行姿态、位置等参数需要一个参照基准,这个参照基准称之为坐标系[11]。忽略机体变形、弹性振动,四旋翼无人机的飞行可当作一个刚体的运动,包含六个自由度,即四旋翼无人机的运动包含其质心沿着三轴的线运动与刚体绕三轴的角运动。
综合考虑四旋翼无人机的受力特点,为便于分析四旋翼无人机姿态描述及受力分析,本文采用地面坐标系与机体坐标系相结合的参考坐标系的方式,对四旋翼无人机进行受力分析,相关坐标系如图1所示:

图1 地面坐标系Og-ZgYgZg与机体坐标系ob-xbybzb
2.2 诱导速度
旋翼的诱导速度,是指由于旋翼的旋转,导致空气在流经旋翼时的速度变化而产生的变化量(包括方向和大小的改变)。
1)四旋翼无人机旋翼悬停时
此时四旋翼无人机的各个旋翼处于轴流状态,此时多旋翼无人机的旋翼桨盘处的诱导速度V10
(1)
ρ表示空气密度,T为滑流区所受到的合外力,R表示桨盘半径。
2)当四旋翼无人机的旋翼处于一般飞行状态时
四旋翼无人机的旋翼处于斜流状态,采用上面的分析方法,可得到此时的旋翼诱导速度。
飞行器以速度V0运动时,可得旋翼的诱导速度
(2)
3 旋翼的相对气流
在空中飞行时,依据不同的飞行状态,旋翼气流状态可分为轴流状态和斜流状态。当旋翼处于轴流状态时,相对气流的方向平行于垂直于旋翼的桨盘平面;当旋翼处于斜流状态时,相对气流的方向与旋翼的桨盘平面的夹角为锐角[12]。
旋翼飞行器的空气动力学特性相对于固定翼飞行器来说,要复杂地多,究其原因,在于旋翼飞行器的空气动力学特性在本质上是非线性的、非定常的[13,14]。
旋翼所处的状态不同时,旋翼的空气动力学特性差别较大,下面以四旋翼无人机处于飞行速率为V0做前飞飞行时为例,研究旋翼的相对气流。
为便于研究旋翼的气流特性,建立如图2所示的旋翼旋转轴系。

图2 旋翼旋转轴系下的相对气流
在OXsYs平面内,设旋翼的诱导速度为V,将相对气流V0沿着前进方向和垂直于前进方向进行分解分解,再除桨尖的线速度ΩR,得
(3)
λ为垂直于飞行器旋翼的平面速度系数,μ为平行于飞行器旋翼平面的速度系数,这两个系数在求解四旋翼无人机的旋翼所受到的空气动力和动力矩时可以起到很好的化简作用。
2.4 旋翼的力与力矩分析
通过对桨叶与旋翼的相对气流分析可知,当样机前飞时,旋翼将受到两个力(阻力D和拉力T)和两个力矩(侧倾力矩L和扭矩Q)的共同作用,并有如下关系[7]
(4)
其中,k表示旋翼桨盘面积补偿系数,Ω为旋翼翼尖转速,R为桨叶半径,CT表示旋翼的拉力系数,CD表示旋翼的阻力系数,CQ表示旋翼的扭矩系数,CL表示旋翼的侧倾力矩系数。
为便于分析,建立如图3所示的叶素坐标系。
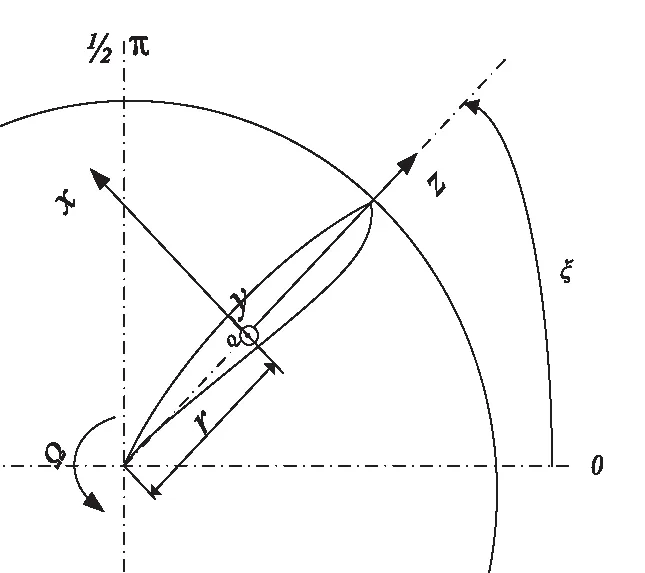
图3 叶素坐标系示意图
如图3所示,取方位角为ξ、距离桨叶中心为r的桨叶微段,其弦长为c,宽度为dr,称此微段为叶素dr。
如图4所示,α迎角,β表示气流的来流角。对叶素dr进行受力分析。叶素受到两个力的作用,分别为垂直于空气流速方向的升力dL和平行于空气流速方向的阻力dD,dL+dD为叶素所受到的合外力,dD和dL的大小分别为[15]

图4 叶素受力分析图
(5)
其中,P为叶素dr所在桨叶处的空气气压值,Cd为桨叶的型阻系数,Cl为叶素的升力系数,P,Cd,Cl的大小分别为[11]
(6)
(7)
(8)
其中,a力常数;α流迎角;Re为雷诺数
将桨叶叶素的拉力dT沿着桨叶径向积分,乘上单个旋翼的叶片数量,取在旋转平面的均值,即得单个旋翼所受到的拉力T。
拉力T的大小的计算结果为
(9)
运用相同的积分方法,得阻力D、扭矩Q和侧倾力矩L的大小的计算结果分别为
(10)
(11)
(12)
结合上述公式,可得多旋翼无人机旋翼的空气动力学系数为
(13)
当无人机处于悬停状态时,飞行速度V0,旋翼旋转轴处的相对气流速度为0,桨尖处的相对气流速度为ΩR,方向与旋翼的旋转方向垂直,此时由式(3)可得μ=0,λ≈0.5;根据式(10)、(12),得出悬停状态时阻力和侧倾力矩为零,则此时CD和CL为0。
3 仿真分析
在四旋翼无人机飞行过程中发现,θ,Φ是很小,但并不是θ≈0,Φ≈0,且在固定ψ的情况下,无人机可以完成任意运动。为了观察无人机在飞行过程中的一个运动学区间,因此在仿真中,设定θ,Φ和ψ∈[-10°,10°]。当无人机处于前行飞行速度V0=sin(t)时,桨盘半径为12cm,飞行时角速度为300rad/s,V为诱导速度,仿真时间为10s:
(14)

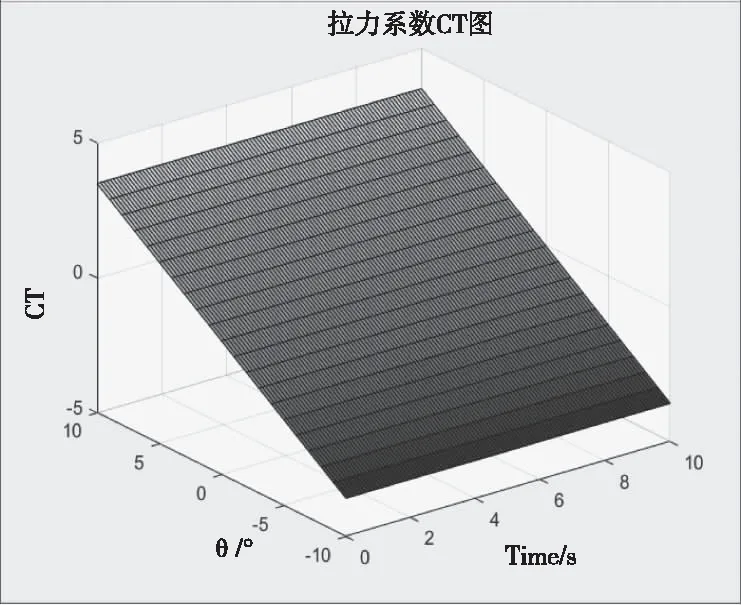
图7 拉力系数CT的变化图

图8 扭矩系数CQ的变化图

图9 侧倾力矩系数CL的变化图
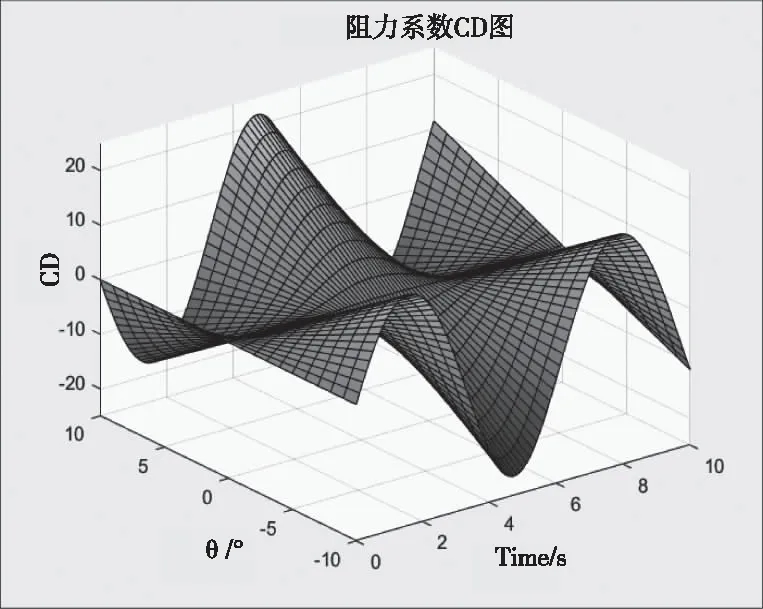
图10 阻力系数CD的变化图
仿真过程中设置仿真时间为10s,拉力系数CT与扭矩系数CQ随着前飞速度的变化而变化的不明显,拉力系数CT会随着前飞速度增加而有小范围的增加,扭矩系数CQ则有小范围的减小;但是它们对姿态角的变化更为明显,当俯仰角变大时,两个系数都增大,CT最大可达3.5左右,CQ最大可达0.7左右;俯仰角变小时,系数都减小。侧倾力矩系数CL会随着前飞速度增加而增加,减小而减小,同时俯仰角变化时,也会随着变化,CL最大可达0.009左右。阻力系数CD是会随前飞速度和俯仰角变化最明显的,当俯仰角为0°时,在0~2s时V0不断增加,而CD变化的不明显,但俯仰角发生变化后,再随着V0增加而增加,最大可达22左右,2s后,前飞速度减小,CD也变小,4s时无人机处于反向飞行状态,CD又反向达到最大值,综合看来,俯仰角在[-5°,5°]是比较好的,此时前飞速度增加,阻力系数也不会变化的太大,相对来说是比较平稳的。
4 实验验证
为了验证仿真结果,搭建了如图11所示的四旋翼无人机样机。

图11 四旋翼无人机样机
对无人机飞行状况进行验证,通过实际飞行检测,得到图13的飞行稳定性曲线图。
(15)
S表示四旋翼无人机飞行稳定性系数。在实际飞行过程当中,飞行高度为90m,前飞速度为8m/s,环境为无风、晴朗;以阻力系数CD作为评判四旋翼无人机飞行稳定的一个重要因素,从图12中可看出,阻力系数在10°时候是波动最大,在0°时波动最小,由此结合图13,当俯仰角为10°至5°范围时,四旋翼无人机飞行稳定性系数有所降低;当俯仰角为[-5°,5°]时,四旋翼无人机飞行稳定性系数开始增大;当俯仰角取0°时,四旋翼无人机飞行稳定性系数最大,此时四旋翼无人机飞行最平稳。
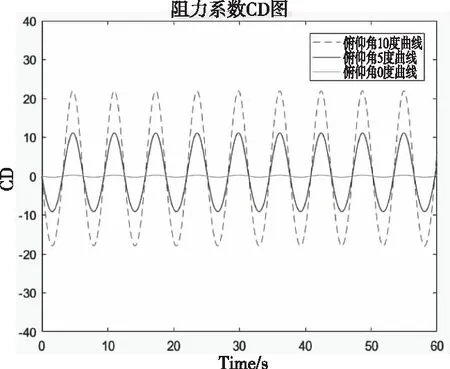
图12 阻力系数CD图
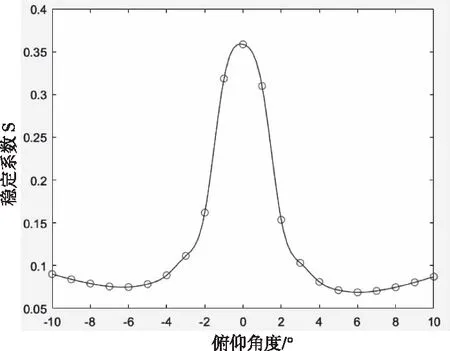
图13 飞行稳定性曲线图
无人机在悬停状态时,由于CD=CL=0,结合式(15)可得出,S为无穷大;故无人机悬停时,在满足俯仰角的区间内,稳定性都是最好的。
5 结论
四旋翼无人机旋翼的空气动力学系数不仅与旋翼的几何参数有关,而且与旋翼无人机所处的飞行状态也有关系。要想无人机保持良好的飞行稳定性,可适当提高旋翼的转速和前飞速度,尽量使得无人机在一个较小的姿态角范围内飞行,因为旋翼转速增大,拉力T也增大;前飞速度增加,则阻力会有一定的增加,但若俯仰角保持在[-5°,5°]内,则阻力不会增加太大,可以使得无人机有良好的飞行状态,而侧倾力矩系数相对较小,所以侧倾力矩增加的较为缓慢,但前飞速度不宜过大,否则侧倾力矩超过临界值会导致无人机侧翻而失控,甚至引起坠机。通过实际飞行测试,验证了四旋翼无人机飞行时姿态角保持在一个较小的范围内,飞行速度的适当增大会有利于提高无人机的飞行稳定性,也为无人机的应用提供了理论依据。