基于仿真的游乐设施模型优化与加速度测量
2021-11-17项辉宇冷崇杰
项辉宇,李 磊,冷崇杰,徐 锐
(北京工商大学,北京 100048)
1 引言
加速度是游乐设施的一项重要指标,游乐设施的设计既要追求惊险刺激的游乐体验又要保证乘客对加速度的耐受和安全。为使乘客不受到伤害,游乐设施标准要求人体加速的限制在一定范围内,我国人体加速度判定主要依据安全标准GB 8408-2018《大型游乐设施安全规范》[1]进行评价。目前,广泛采用对加速度测量[2]的对象是设备,虽然将加速度测量的坐标原点定在座椅上方人体内脏处,但实际测量时,加速度的测量点固定在设备座椅上;虽然采用加速度传感器或者加速度数据记录仪可以精确测量设备加速度数值,但当游乐设施运行过程中,由于座椅、人体和其它构件的相互作用,导致人体加速度和座椅加速度产生差异,甚至经常会出现人体加速度[3]超过座椅加速度,因此测得的座椅加速度不是真正意义上的人体加速度,依据座椅加速度进行安全性评价具有明显的局限性,因此,有必要建立座椅与人体之间的运动传递模型,明确人体和设备的响应关系,这对判定人体的加速度是否符合要求至关重要。
为了解决这一问题,本文选取如图1所示5环过山车设计方案建立了座椅—乘客传递模型,根据Adams中模拟的到的座椅、下躯干、上躯干、内脏、头部[4]等加速度实验数据并对模型中的参数进行识别,得到完整的传递模型,对设备和人体加速度之间的响应关系提供了模型和量化,在此基础上,可根据检测获取的座椅加速度进行人体特定位置的加速计计算,并进而依据有关标准进行乘载安全性评价 。
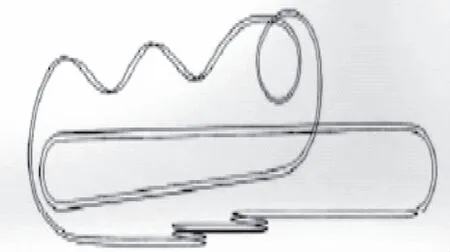
图1 五环过山车轨道
2 人体-座椅传递模型建立
通过预模拟确定人体模型和座椅以及安全压杠之间的定位,实现人-椅模型耦合如图2示。
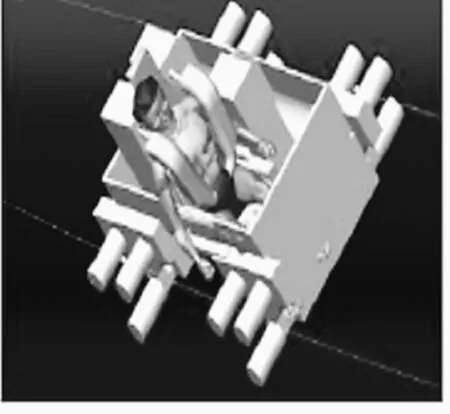
图2 人椅耦合模型
依照标准中对乘客良好束缚的描述,按笛卡尔坐标对人体坐标系做如下规定,身体重心竖直向上方向为Z,前进方向为X,左右方向为Y,XYZ符合右手坐标规则。假定人体在X向和Y向的运动受到限制,本文主要探究Z方向乘客-座椅传递模型的响应关系。在Adams中模拟过山车从最高点开始运行到站台的过程,输出座椅、上躯干、下躯干、内脏、头部的加速仿真数据。依据仿真数据绘制人体加速的随时间变化图像,结果如图3所示。
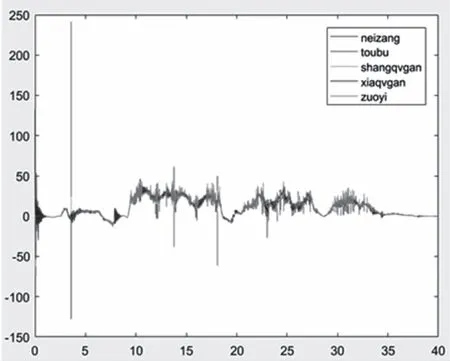
图3 人体不同部位加速度
从输出的结果来看,人体不同部位加速度的响应不同。在Z方向上的响应时间,梯度变化及响应结果存在显著差异。通过仿真进一步说明采用座椅加速度代替人体加速度是不符合实际的。
从输出的结果来看,人体不同部位加速度的响应不同。在Z方向上的响应时间,梯度变化及响应结果存在显著差异。通过仿真进一步说明采用座椅加速度代替人体加速度是不符合实际的。
2.1 模型建立
为研究人体Z方向加速度[5]响应关系,特别是获取人体内脏、头部及上躯干等重要位置的加速度信息,文中建立了垂向3自由度如图4 和4自由度[6]如图5人体-座椅传递模型。其中垂向3自由度模型主要探究座椅-内脏-臀部传递链,垂向4自由度模型探究座椅-臀部躯干-头部传递链。
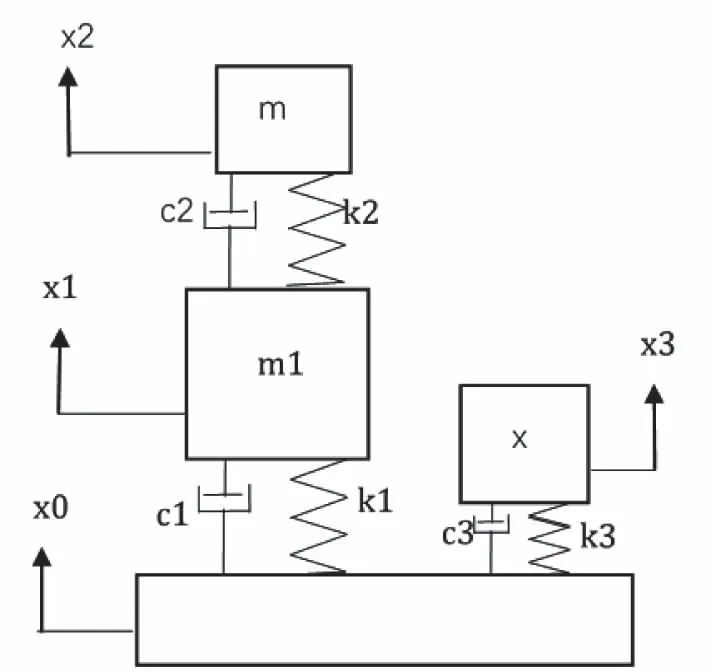
图4 三自由度模型
根据3自由度模型建立传递函数微分方程如式(1)

(1)
在图4中,m1为臀部,m2为内脏,m3为大腿;c1、k1分别为臀部刚度、阻尼;c2、k2分别为内脏刚度、阻尼;x0为座椅位移激励、x1、x2、x3分别为臀部、大腿和内脏产生的位移。
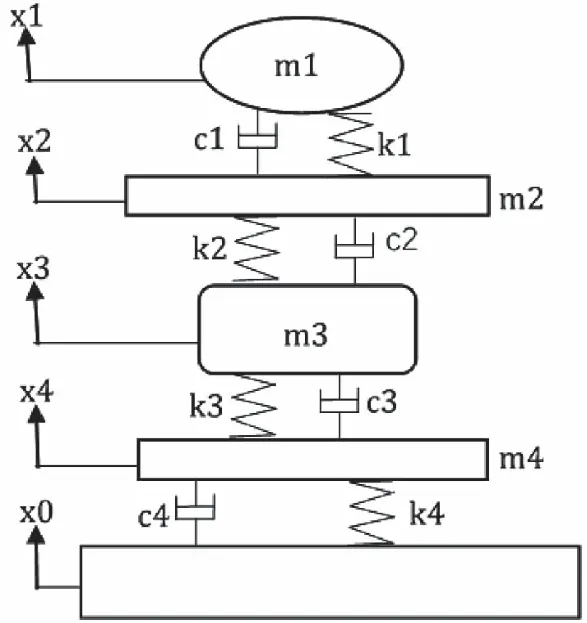
图5 四自由度模型
图5中,m1为头部,m2为上躯干,m3为臀部,m4为下躯干;c1、k1为颈部刚度、阻尼;c2、k2为上躯干刚度、阻尼;c3、k3为臀部刚度、阻尼;c4、k4为下躯干刚度、阻尼;x0为座椅位移激励、x1、x2、x3、x4分别为头部、上躯干、臀部和下躯干产生的位移。
根据4自由度[7]模型建立传递函数[8]微分方程如式(2):
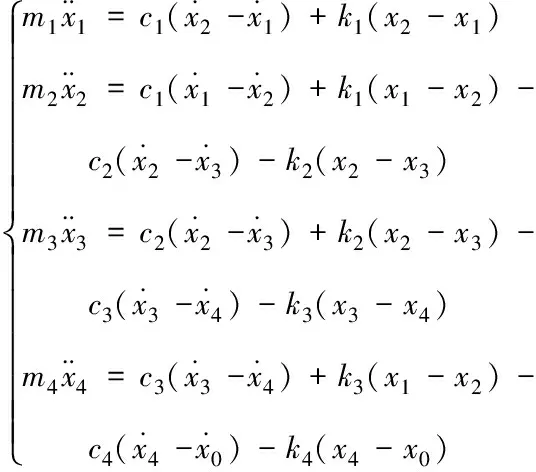
(2)
将式(1)和(2)两组微分方程进行拉普拉斯变换,并令s=jw得到频响函数如式 (3)和(4)如下
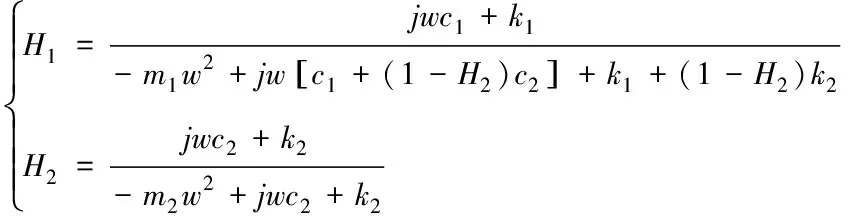
(3)
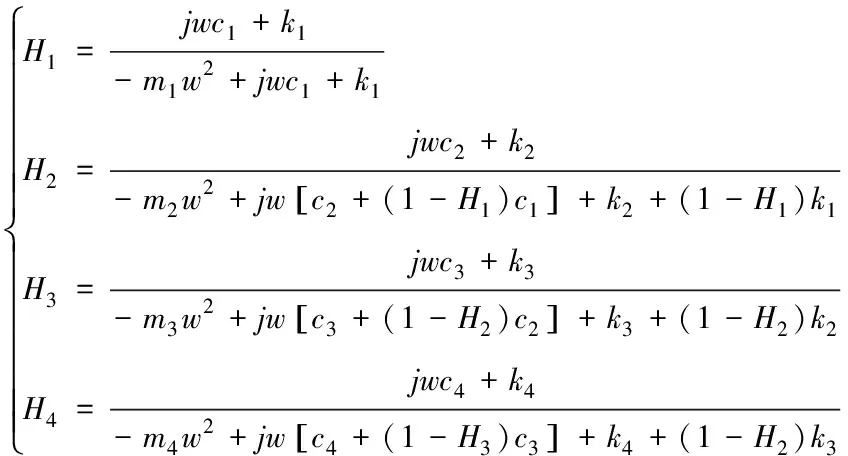
(4)
在上述模型中,人体各部分的质量、刚度和阻尼均为未知参数;因此,将模拟得到的座椅、下躯干、上躯干、头部和内脏的仿真数据作为参数识别的依据,用最小二乘法将模拟结果拟合到上述两个传递模型中,构建参数识别表达式J如式(5)

(5)
式中Hs表示仿真模拟得到的各部分频响函数的幅值,Hm表示建立的数学传递模型的频响函数的理论幅值。
2.2 模型的仿真和优化
针对上述2个人-椅传递模型,Matlab[9]和Isight联合仿真,如图6所示。
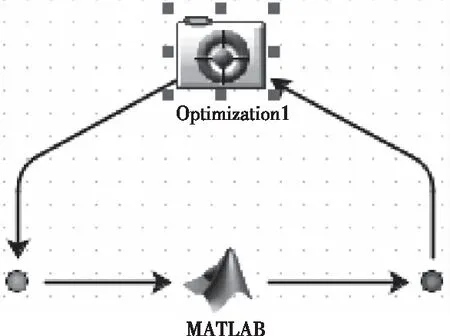
图6 联合仿真模型
为使参数表达式J取得最小值构建最优目标函数,选用Multi_islandGA算法[10]进行参数识别,其中各个参数初值取给定区间范围的中间值。MATLAB负责接收各参数值并计算目标函数值,ISIGHT模块[11]负责对目标函数进行评判和产生新的参数值,将获得的所有目标函数值进行比较,选择最小的J对应的未知参数,从而完成对目标函数的识别。用曲线拟合优度ε,式(6)来评价上述两个模型拟合的优劣,最终的到完整的传递模型。

(6)
结合人体质量分布的实际情况,各个待识别参数的取值[12]范围如式(7)和(8),在该围内拟合以求快速收敛。
针对3自由度模型为
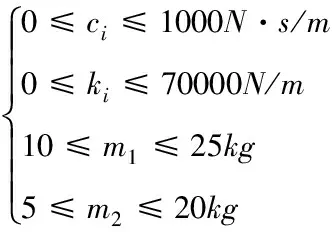
(7)
针对4自由度模型为
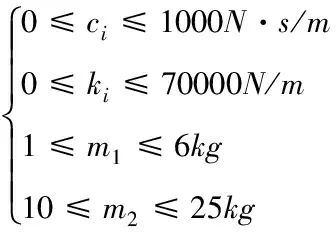
(8)
式中i=1,2,3,4。
其中3自由度模型的初值及运行结果如图7所示。
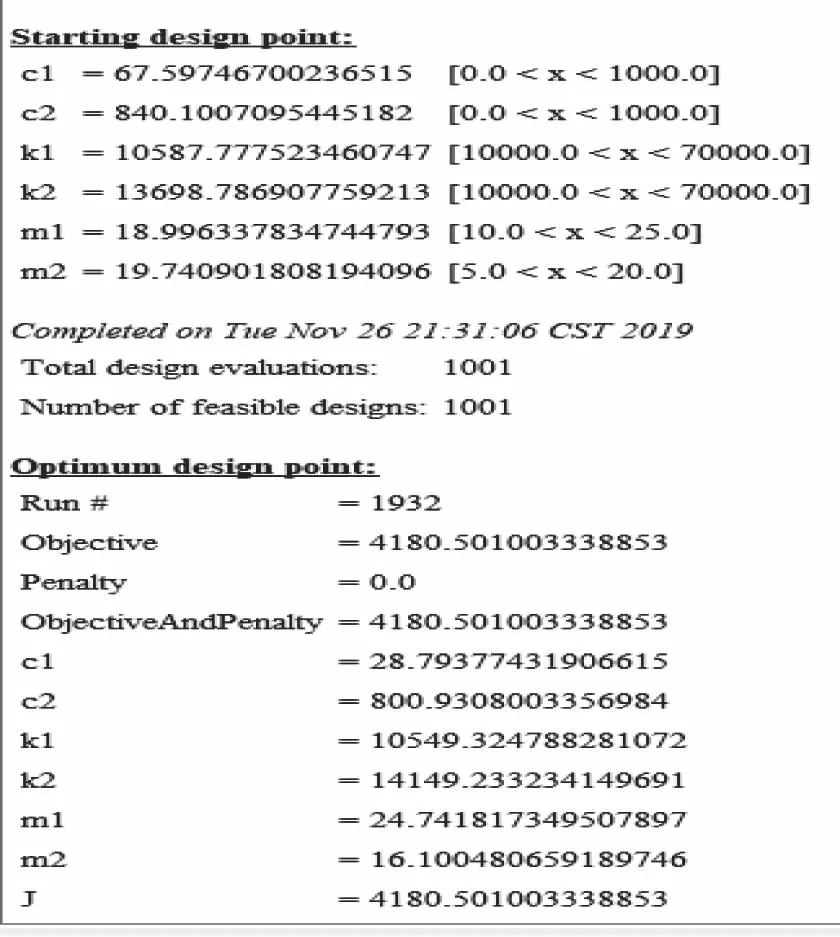
图7 三自由度仿真结果
将3自由度和4自由度传递模型在Simulink中进行模型搭建如图8和图9。
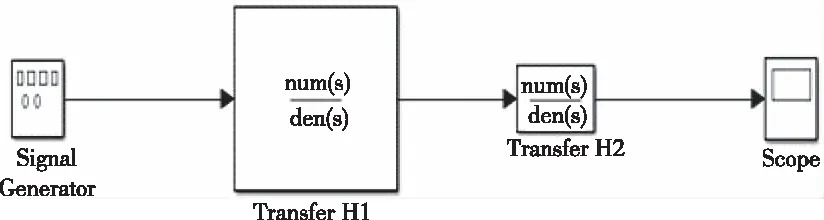
图8 三自由度模型
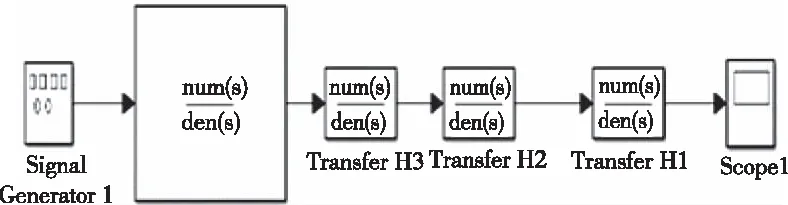
图9 四自由度模型
根据联合仿真得到各参数的具体取值如表1和表2所示
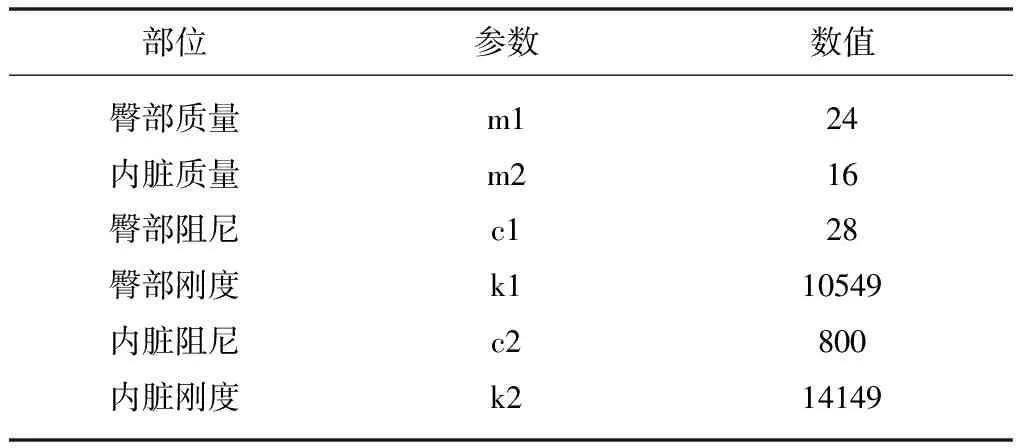
表1 三自由度模型参数
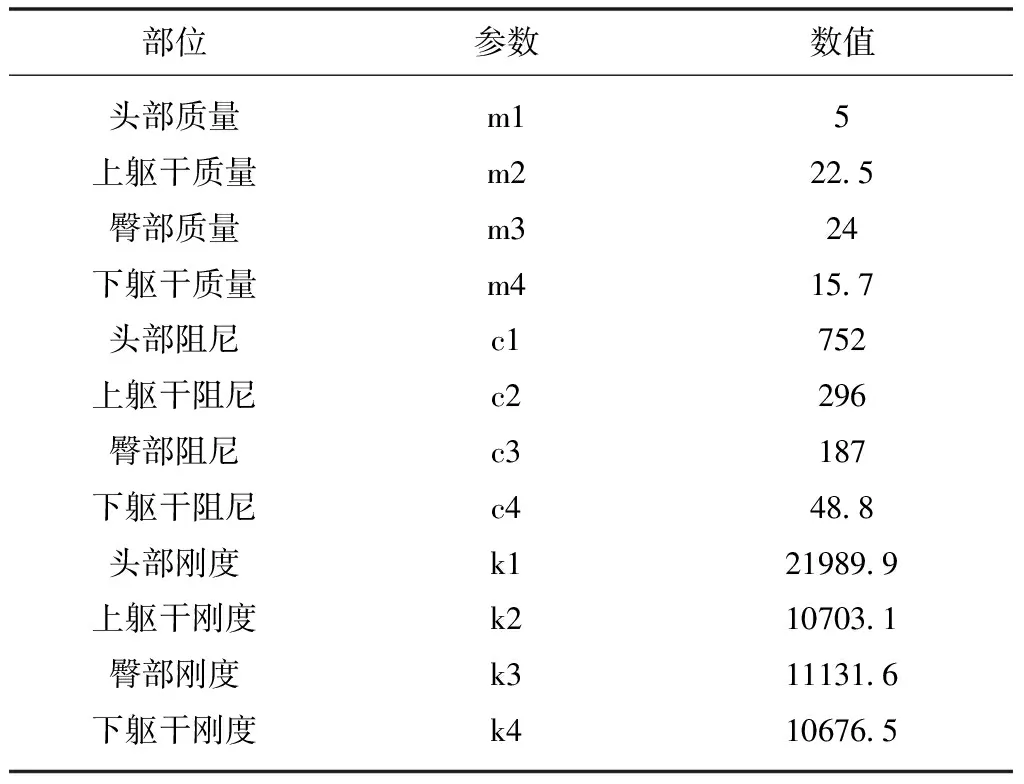
表2 四自由度模型参数
其中图10为三自由度模型部分参数取值的二维分布情形,图11为三自由度部分参数取值的三维分布情形,可以看出目标函数值逐步趋于收敛。
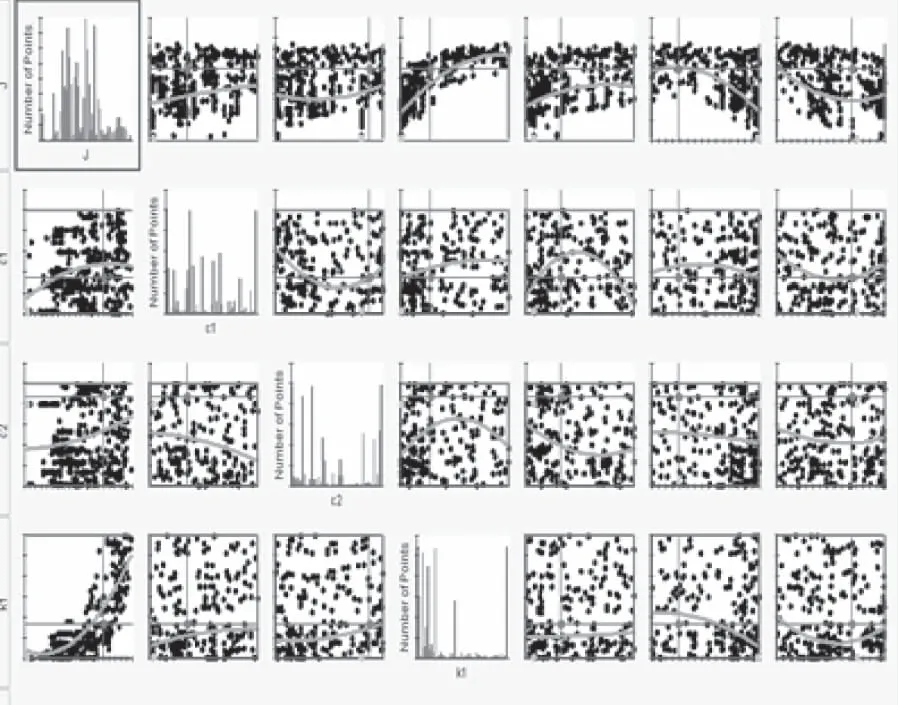
图10 参数二维分布
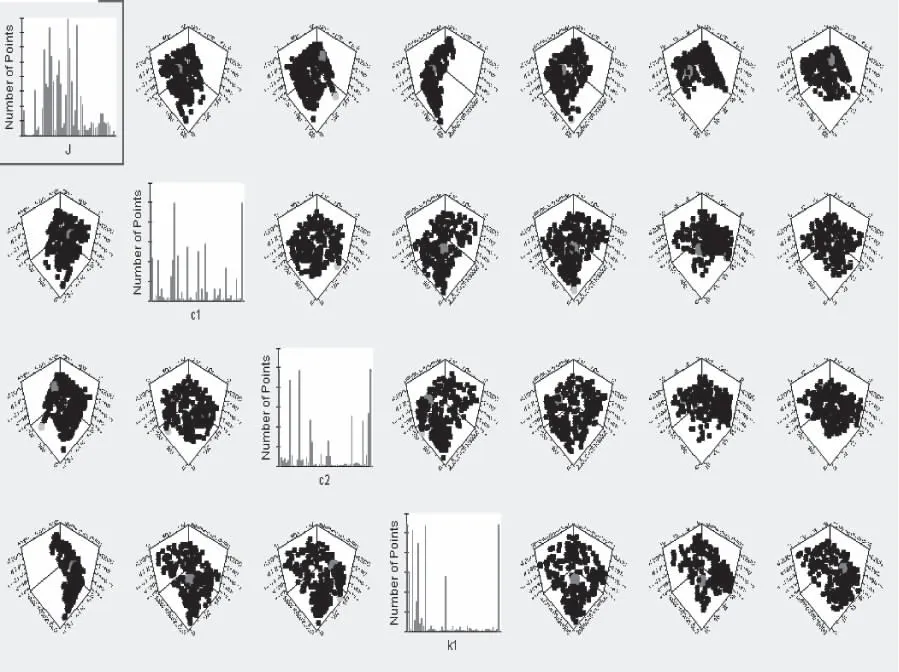
图11 参数三维分布
通过联合仿真确定出两个传递模型的系统参数,为比较两模型拟合的优劣,利用曲线拟合优度ε评价两模型,得到ε分别为99.57%和99.63%,误差值J1>J2,因此,理论上应选用模型2作为完整的传递模型;从实际情况来看,模型2较模型1相比复杂度增加,而拟合效果改善并不显著,且模型1基本可以满足实践需求,综合考虑选取模型1作为人体—座椅加速度传递模型。
3 结论
本文运用最小二乘法对仿真数据进行拟合,采用联合仿真对模型优化完成参数识别,利用拟合优度ε型进行评价从而得出完整的人椅传递模型,在游乐设施人体加速度测试过程中,可以在仅知道座椅加速度的条件下通过模型响应关系,判断人体加速度是否满足安全判定要求。由于采用设备加速度作为人体加速度,不能准确的分析设备和人体相互作用带来的加速度差异,本文模型可在仅知座椅加速度的条件下,依据模型传递关系获取人体加速度并进而判断是否满足安全标准,为解决游乐设施运行过程中人体模型特定部位加速度测量难的问题,提供了新的途径,有利于开展更趋合理的游乐设施乘载量化安全评价。
