RLV末端能量管理段三维鲁棒制导方法
2021-11-14穆凌霞张友民
穆凌霞,余 翔,张友民
(1. 西安理工大学陕西省复杂系统控制与智能信息处理重点实验室,西安 710048;2. 北京航空航天大学自动化科学与电气学院,北京 100191;3. 康考迪亚大学机械、工业与航空工程系,蒙特利尔H3G 1M8)
0 引 言
可重复使用运载器(Reusable launch vehicle, RLV)作为一种新型天地往返空间飞行器,可极大地降低运载成本、提高空间飞行的灵活性[1-2]。RLV返回过程中经历末端能量管理段(Terminal area energy management, TAEM)、高超音速再入段(Hypersonic reentry, HRE)、进场着陆段(Approach and landing, A&L)。其中TAEM段是RLV实现自主水平着陆的关键环节,在该段RLV无动力滑翔,需实现大范围内的横侧向机动任务,面临着在三维空间的高速返回、多约束、多扰动的挑战,如何实现三维高精度鲁棒制导成为RLV自主返回的难点之一。
目前RLV末端能量管理段的制导方法主要有两类。第一类是二维解耦轨迹制导技术。典型的是美国航天飞机TAEM制导方案[3],将地面轨迹分为S转弯段、捕获段、航向校准段(HAC)和预着陆段,纵向轨迹则根据地面航程进行实时调整。文献[4]针对亚轨道飞行器Hopper研究了改进的航天飞机TAEM制导方案,通过减少飞行段数、放宽轨迹几何约束,提高轨迹的灵活性。文献[5]设计了改进的航天飞机TAEM策略,纵向剖面为马赫数随高度变化的三次函数。文献[6]通过改变HAC半径降低了轨迹形状的约束,迭代三个参数求解TAEM轨线,增强了轨迹鲁棒性。文献[7]通过分析RLV末端约束条件,提出能量管的概念,若轨迹位于能量管中间位置,则具有较强的鲁棒性。文献[8-11]在航天飞机TAEM制导策略的基础上,对算法的实时性的提高进行了尝试。文献[12]在HAC前增加直线预测捕获段,并预先规划TAEM轨迹,降低实时性的要求。文献[13]研究了减速板故障下的纵向剖面修正的方法。
第二类是考虑纵横向耦合的三维空间上的轨迹制导方法。有代表性的为文献[14]提出的内核提取的次优节点应用方法(Sub-optimal nodal application of the kernel extraction, SNAKE),设计动压剖面,利用高度域动力学方程迭代计算三维轨迹。文献[15]对SNAKE迭代求解逻辑和地面轨迹机动方式进行了改进,加快了轨迹推演的速度。文献[16]将双回路迭代算法改进为递推算法,提高了求解速度。文献[17]提出沿最优路径飞行(Optimum-path-to-go, OPTG)的制导方法,离线构造轨迹数据库,并对离线轨迹进行编码,根据当前飞行状态在线选择参考轨迹,同时考虑扰动对轨迹进行修正,实现了基于数据库的轨迹重规划方法。文献[18]针对亚轨道飞行器Hopper和X-33,将末端制导问题描述为一定约束条件下的优化问题,利用加速梯度投影算法求解该优化问题,实现三维参考剖面的更新。文献[19]利用微分平坦理论对TAEM轨迹优化问题进行降维,通过B样条对问题进行离散化,并采用SNOPT工具箱求解。
总的来说,上述两类TAEM制导方法本质上为参考轨迹制导,考虑到末端能量管理段任务的特殊性(三维空间大幅度横侧向运动),实现过程中,在算法复杂度、制导精度和在线自适应能力上有所折衷。比如第一种航天飞机TAEM制导方案,采用了离线和在线相结合的思路,地面轨迹形状为离线设定,纵向轨迹在线调整,是一种纵横向解耦的策略,易于工程实现,但是制导精度和自适应能力需进一步提高。第二种SNAKE制导方案,考虑了三维特性,但是轨迹迭代时间较长,实时性和鲁棒性有待提高。由于RLV末端返回时需完成三维机动飞行,其制导模型为多输入多输出非线性模型,制导问题为强非线性多约束优化问题,在线TAEM轨迹制导方法具有一定难度,传统在线数值预测-校正制导不适用于多参数变量和多约束的制导问题,而由最优控制问题转化得到的非线性规划问题在解的存在性及计算时间方面难以满足。
本文针对RLV在末端能量管理段所面临的复杂的制导任务需求,提出了一种基于滑模控制理论的鲁棒制导及指令更新策略,从理论上证明并保证了轨迹生成的可靠性,结合周期性校正机制,抵抗返回过程的气动、大气等干扰。主要贡献在于:
1)设计三维滑模面,当到达其中两个滑模面时可满足TAEM末端状态的约束(包括航迹角、航向角、纵向位置和横向位置),而另一个滑模面则为实际动压剖面与理想动压剖面的误差项,当到达该滑模面时,意味着RLV的动压跟踪上理想动压剖面,从而间接满足TAEM整个过程中的动压约束;
2)基于高度域制导模型,设计二阶滑模制导律,并证明滑模面在指定高度可达;利用滑模制导律,得到满足多约束的TAEM轨迹及制导指令,仅与当前系统状态相关,无需迭代求解,减少轨迹生成的时间;
3)考虑到RLV飞行中受气动、大气和质量偏差等干扰,长时间单一制导指令易导致累积误差无法满足高精度TAEM末端约束需求,设计周期性制导指令更新机制,可根据RLV当前实际状态进行轨迹及指令的修正,从而抵抗大气和气动等干扰的影响。
1 问题描述
1.1 面向制导的动力学方程
RLV在末端能量管理段的三维滑行动力学方程可表示为:
(1)
式中:ft=[ft1,ft2,ft3,ft4,ft5,ft6]T,具体形式为:
(2)

升力系数CL和阻力系数CD为迎角α的多项式函数:
CL=CL0(Ma)+CL1(Ma)α+CL2(Ma)α2
(3)
CDCD0(Ma)+CD1(Ma)α+CD2(Ma)α2+
CD3(Ma)α3+ksb(Ma)δ
(4)
式中:CLi(i=0,1,2)和CDi(i=0,1,2,3)分别为马赫数在[0.5,2.5]范围内的多项式系数,随马赫数的变化而变化,ksb为减速板δ对阻力系数的影响因子。

(5)
式中:fH=[fH 1,fH 2,fH 3,fH 4,fH 5]T,具体形式为:
(6)

1.2 末端能量管理段制导任务及约束条件分析
RLV在末端能量管理段飞行示意图如图1所示。从末端进入点(Terminal entry point, TEP)飞行至进场着陆段的起点ALI处,高度跨越25908 m~3048 m,马赫数范围在Ma2.5~Ma0.5,跨越超音速、跨音速和亚音速飞行。

图1 RLV末端能量管理段示意图Fig.1 Schematic diagram of RLV trajectory during TAEM phase

表1 TAEM段飞行约束条件Table 1 Flight constraints during TAEM phase
2 制导策略及流程
设计TAEM三维鲁棒轨迹制导策略如图2所示,基本思路及实现流程如下:

图2 TAEM三维鲁棒制导策略结构图Fig.2 Flowchart of the proposed TAEM guidance strategy
1)基于标称高度域模型设计滑模制导律,寻找制导指令,使得RLV能够从当前状态(并不需要是起点位置)滑行到末端状态,并且满足如表1所示的过程动压约束和终端约束;将制导律作为输入代入高度域制导微分方程。利用龙格-库塔法求解从当前状态到末端状态的常微分方程初值问题(Initial value problem, IVP),得到离散制导指令序列为u-h。
2)将该制导指令作为时域系统的输入(时域系统上可增加随机干扰项),因其随飞行高度而变化,因此实际的输入实时地根据线性插值计算得到。在一个制导周期内利用龙格-库塔法求解由带干扰的实际时域制导模型及其当前状态所决定的常微分方程初值问题。
3)考虑到实际时域系统模型可能受到气动、大气和质量偏差等干扰,采用理想制导指令不能完全跟踪期望轨线。设计了周期性的制导校正机制,一个制导周期后更新RLV系统状态,并判断是否到达TAEM终端完成任务。若到达TAEM终端,则结束,若未到达,则重新根据当前状态利用滑模制导律,生成满足约束条件的轨线及制导指令,实现制导更新,抵抗大气、气动、质量偏差等扰动对TAEM返回过程的影响,完成高精度TAEM制导任务。
值得注意的是,其中滑模制导律是使得系统(即标称高度域制导模型)实现期望目标的闭环状态反馈律,因此求解由滑模制导律、高度域模型和初始状态构建的IVP,得到的状态轨线能够满足:当RLV到达指定终端高度时,终端约束和飞行过程中动压满足要求,这将在第3.1节得到证明。
此外,为了满足TAEM飞行过程中的动压约束条件及终端能量的要求,本文预先设定了纵向动压-高度剖面,并将实际剖面与预定剖面之间的误差作为滑模面之一,利用滑模制导律实现对预定剖面的跟踪,通过该方式,可间接满足TAEM过程中的动压约束及终端能量约束。传统轨迹生成方法根据预定的动压剖面,双回路或三回路迭代求解其他轨迹参数[11,14],计算耗时较长,无法适应实时校正的需求。本文通过设计三维滑模面及二阶滑模制导律(详见第3.1节),将制导律作为输入代入高度域制导微分方程,求解IVP问题,从而实现动压约束和其他终端状态约束的同时满足。无需迭代求解,可避免优化无解或时间过长的问题,提高轨迹生成的速度。
3 三维鲁棒滑模制导算法实现
3.1 考虑多重约束的滑模制导指令生成
本节给出基于高度域制导模型的三维滑模面及二阶滑模制导律的设计过程,旨在保证所生成的状态轨线满足预先设定的动压-高度剖面约束,同时满足TAEM末端位置、航迹角以及航向角的约束,并生成制导指令。
3.1.1滑模面设计
设计三维滑模面向量sa[sa1,sa2,sa3]T为:
sa=fa(x(H),H)
(7)
其中:fa=[fa1,fa2,fa3]T设计为下式的形式:
(8)

滑模面sa对虚拟高度H求一阶导和二阶导,可得到:
(9)
Guv+F
(10)
式中:矩阵G和F的元素为:
(11)
(12)
G13=G21=G31=F2=F3=0
(13)
式中:uv称为虚拟输入,定义为uv[C′D,γ′,′]T。3.1.2滑模制导律综合设计

因此,带约束的TAEM制导问题转变为如何保证sa=0和s′a=0。由式(10)可见,对sa求导两次,显含控制输入uv,利用反步法为该二阶系统设计制导律。设计二阶滑模面为:
(14)
式(14)对虚拟高度求一阶导后有:
A+F+Guv
(15)
其中:A=(kasa+kas′a(Hf-H))/(Hf-H)2,G和F同式(10)。
定理1.考虑系统(14),在制导律:
uv=-G-1[F+A+ksgn(sb)]
(16)
(17)
的作用下,当H趋于Hr(Hr≤ηHf),sb趋于平衡点0。

(18)
记Hr为到达滑模面sb=0时的高度,此时有Vb(Hr)=0。两边积分得到:
(19)
(20)

(21)
式中:Δ为滑模边界层,取常值。
定理 2.考虑动态系统
s′a=-kasa/(Hf-H),ka>1
(22)
在区间[Hr,Hf]内,当H趋近Hf时,sa和s′a趋近于 0。

(23)
由于Hf总是大于H,且ka>0,有V′a<0。因此当H→Hf有sa→0。
对式(22)的每个分量变换得:
dsai/sai=-kadH/(Hf-H)
(24)
记sa(H=Hr)sar=[sar1,sar2,sar3]T,对上式积分,有:
(25)
因此sai=sari(Hf-H)ka/(Hf-Hr)ka,则s′ai=-kasari(Hf-H)ka-1/(Hf-Hr)ka,写成矩阵形式有
(26)
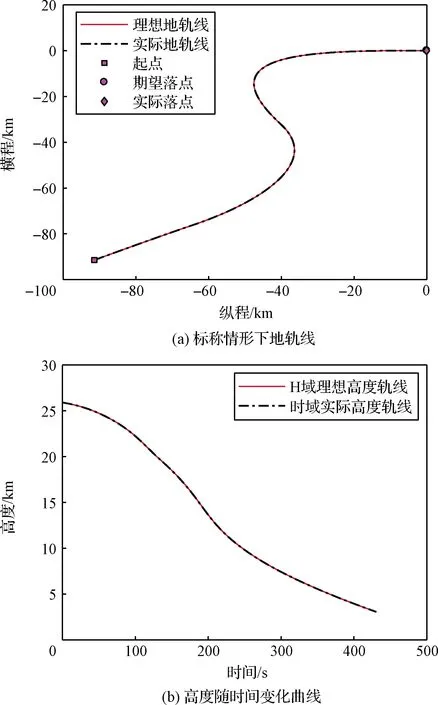
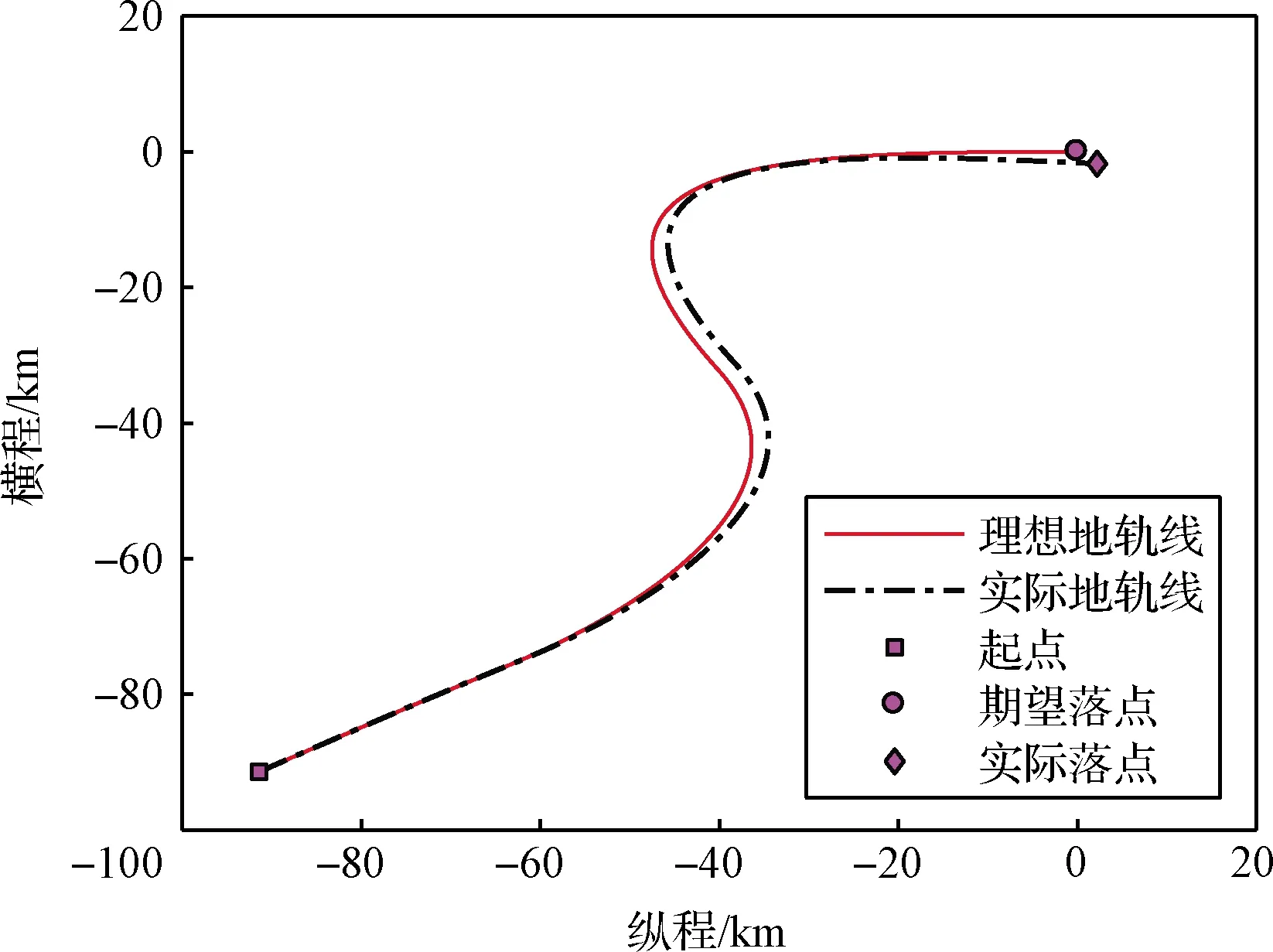
因为,ka>1,Hr 根据虚拟输入uv,利用方程(5)中的关系易计算得到实际输入: u=fu(xH,uv) (27) 具体如下: (28) (29) (30) (31) fH=[fHi]T|i=1,…,7 (32) 其中:fHi|i=1,…,5由式(6)决定,fH 6=uv1,fH 7=-1/(Vsinγ)。 值得注意的是,上述设计的高度域滑模制导律将用于生成TAEM轨迹及制导指令,该方法的优势之一是从理论上证明了采用该制导律能够保证所生成的轨迹满足约束要求。此外,在生成轨迹时无需求解优化问题,避免了优化求解时可能因无法找到最优解而导致轨迹规划失败、无法获得有效制导指令的问题,因此本文方法可保证轨迹生成的可靠性及制导指令解的存在。 理论上采用该制导指令作为时域制导模型的输入,将能得到与标称高度域IVP一致的状态轨线。但是在实际飞行中,系统受多种扰动影响,如气动模型的偏差、大气环境建模的偏差和RLV质量的变化。若采用理想制导指令作为整个返回过程的制导输入,因扰动引起的累计误差将越来越大,最终无法到达指定的末端返回点。因此,增加周期性的制导校正环节,根据系统实际状态进行实时制导修正,抵抗大气和气动等干扰的影响。所设计的RLV末端能量管理段三维鲁棒轨迹制导算法步骤如下: 1) 初始化xH(H0)xt(t0)。 2) 标称轨线生成:考虑标称高度域模型x′H=fH(xH,u,H),其中u=fu(xH)由式(16)和(27)决定,龙格-库塔法求解常微分方程初值问题(初始状态为RLV当前状态),步长ΔH=3m,得到状态xH在高度域的轨线,满足TAEM约束。 3) 制导指令生成:根据步骤2,计算得到剩余飞行段的离散制导指令相对于高度的序列u=fuh(h)。 4) 制导周期内实际轨线生成:针对考虑干扰的实际时域系统模型(1),根据步骤3中离散制导指令线性插值实时计算任意高度处的制导指令,输入给时域模型,龙格-库塔法求解IVP,步长为Δt=0.01 s,持续一个制导周期(10 s),得到RLV当前的实际状态。 5) 状态更新:记录当前状态,计算下一周期的制导指令,注意自变量H的终端值会发生变化。时域模型的状态更新为xt(t0),高度域模型的状态更新为xH(H0),Hf更新为末端初始高度减去实际飞过的高度。 6) 判断是否到达终端高度,若是结束,若否返回步骤2。 仿真验证中采用的RLV模型为X-34验证机[20],TAEM返回的末端约束如表1所示,初始状态设置为: (33) 滑模制导律式(14)、(16)、(21)中的参数设置为η=0.7,ka=3, Δ=0.1。仿真任务分为两部分:1)标称情形下制导策略有效性及实时性验证; 2)干扰情形下鲁棒性验证。 设定TAEM返回初始状态如式(33)所示,根据标称高度域制导模型(31)及制导律(式(16)和(27)),在整个TAEM高度范围内,计算得到满足约束条件的状态轨线,并计算出相应的理想制导指令。本文利用龙格-库塔法求解IVP生成轨迹用时约0.55 s,相比于文献[14]中的基于迭代的三维轨迹规划算法平均用时1 min左右、文献[19]的基于非线性规划方法的三维轨迹生成用时约1.39 s,本文方法提高了轨迹生成速度。 所得到的状态轨线结果如图3和图4中的实线所示,图3(a)、(b)分别为TAEM地面轨迹形状和高度随时间的变化曲线,其中时间信息是通过式(31)中时间状态得到,完成25908 m到3048 m的TAEM返回飞行需要约414.3 s。图4(a)~(c)分别为RLV的动压、航迹角和航向角随高度变化的曲线,可以看到整个TAEM返回过程动压不超过最大动压19152.1 Pa的约束,而当高度到达指定的TAEM末端高度3048 m时,航迹角和航向角均达到指定约束条件,即末端航迹角-10°、末端航向角0°。相应的理想制导指令如图5(a)~(c)所示,迎角、滚转角和减速板,其指令均在合理的范围内,并且较为平滑,易于后期内环控制回路的跟踪。由此可见,所生成的标称状态轨线能够满足如表1所示的约束条件,并能够满足TAEM返回制导任务需求。 将理想制导指令输入给时域制导模型,注意到理想制导指令是随高度变化的离散指令,仿真中采用线性插值实时计算任意高度处所需的指令。得到的状态轨线如图3~图4中虚线所示,与理想状态结果是一致的。此过程中未考虑时域模型的干扰,因此未加周期性校正环节。 图3 标称情形下TAEM位置和高度轨线Fig.3 TAEM trajectories in nominal case 图4 标称情形下TAEM动压、航迹角和航向角轨线Fig.4 TAEM states histories with respect to altitude in nominal case 图5 标称情形下理想制导指令Fig.5 The predicted guidance commands in nominal case 图6给出的是滑模面随虚拟高度H变化的曲线图。由图6(a)可见,sb的滑动运动发生在虚拟高度6400 m处,并保持到终端虚拟高度22860 m,由图6(b)和6(c)可见,在sb到达零之后,sa和s′a也将趋近于零,正因为如此,系统约束得以满足。 图6 标称情形下滑模面曲线Fig.6 The sliding surface histories with respected to H in nominal case 考虑干扰因素对所提方法进行验证,初始条件同式(33),返回过程中的干扰因素见表2,升力系数、阻力系数、大气密度和RLV质量出现不超过20%的服从均匀分布的随机偏差。 表2 TAEM段干扰因素Table 2 Disturbance during TAEM phase 当不加校正环节时,在整个TAEM返回过程中采用单一的理想制导指令,仿真结果如图7所示,实线为滑模制导计算得到的理想轨线,方点和圆点分别为TAEM起点和期望落点,虚线为实际地轨线,随着返回过程的持续进行,干扰影响不断累加,RLV实际轨线渐渐偏离理想轨迹,实际落点为棱形,偏离期望落点较远,偏差Δxe=1863.6 m, Δye=-1756.8 m,偏差量级在103m,不能有效完成任务。 图7 未加校正的TAEM地轨线Fig.7 The TAEM ground-track trajectory without correction 当加入周期性校正机制,每10 s重新根据当前状态计算理想制导指令,仿真结果如图8和9所示。图8为TAEM地面轨线,其中方点表示RLV在当前制导周期的起点位置,根据当前位置及其他状态信息,利用滑模制导律求解IVP得到的后续理想轨线为实线所示,通过及时的校正更新可以保证在TAEM末端时满足约束要求。图9(a)~(c)分别为加入校正机制之后的动压、航迹角和航向角轨线,其中圆点为时域制导模型积分10 s时所得到的状态,代表每飞行10 s后,RLV当前的状态。实线表示从当前状态(圆点所在处)在剩余高度范围内的理想状态轨线。可见,在出现扰动的情况下,RLV利用理想制导指令无法完全跟踪理想轨线从而导致末端状态无法满足约束,但是引入校正机制后,根据当前状态重新更新飞行状态轨线,得到新的制导指令,从而实现鲁棒制导,有效抵抗干扰对制导精度的影响。最终的位置偏差Δxe和Δye在3 m以内,航迹角偏差约0.4°,航向角偏差为0.001°。可见该制导策略精度较高,鲁棒性较好。 图8 干扰情形下校正后的TAEM地轨线Fig.8 The corrected TAEM ground-track trajectory in the presence of disturbances 图9 干扰情形下校正后的TAEM状态轨线Fig.9 The corrected TAEM state histories in the presence of disturbances RLV末端能量管理段返回制导时,模型复杂、约束条件众多,传统纵横向解耦制导策略不易满足高精度要求,而传统三维制导迭代计算时间不易满足实时性和鲁棒性的要求,针对该问题,本文提出了基于高度域滑模制导律的快速轨迹生成方法及周期性校正策略,提高制导的鲁棒性和精度。通过设计三维滑模面及二阶滑模制导指令,生成满足多重约束要求的状态轨线,避免了传统三维制导方法中迭代求解制导指令的策略,保证了制导指令解的存在以及求解效率,且所生成的制导指令较为平滑易于内环的跟踪控制。所提制导方法在较大的气动、大气和质量干扰的情形下,依然能实现高精度制导的需求,具有较好的鲁棒性。
3.2 实时指令校正机制

4 仿真结果及分析
4.1 模型及其仿真设置

4.2 标称情形下仿真结果分析



4.3 干扰情形下仿真结果分析



5 结 论
