一种仿蝗虫腿空间缓冲吸附机构缓冲参数研究
2021-11-14葛泽宇田应仲
李 龙,葛泽宇,田应仲,张 泉
(1. 上海大学机电工程与自动化学院,上海 201900;2. 上海市智能制造及机器人重点实验室,上海 201900;3. 上海大学人工智能研究院,上海 201900)
0 引 言
随着人类对太空探索的逐步深入,大量航天器被送入太空轨道。当这些航天器由于各种复杂的原因发生故障或损坏时,需要利用小型的缓冲器附着在航天器的表面对其进行故障诊断、故障维修、故障监控或通信检查等。高速运动的小型缓冲器接触到目标航天器时会不可避免地发生回弹现象,因此如何研制出一种可靠性高、缓冲性能好且具有粘附性能的空间缓冲吸附机构已迫在眉睫。同时,传统的机械设计已经无法满足日益深入的深空探索需要,而随着仿生机器人的日渐成熟,将仿生机构应用于太空环境中是未来深空探索的趋势。
针对仿生缓冲机构,国内外很多学者都开展过相关研究。早在21世纪初期,早稻田大学Hyon等[1]设计了一种仿狗后腿的单腿弹跳机器人“Kenken”,它通过弹簧将机器人跳跃的动能转变成弹性势能,从而实现动能的吸收和自身的缓冲;美国俄亥俄州立大学Palmer等[2]设计出一种仿生四腿机器人“Kolt”,其腿部包括大腿、小腿、弹簧和连杆四部分,该机构成功实现了前进时受到较小的冲击,储存了部分能量,并且降低了惯性力。到2011年,美国密执安州立大学Zhao等[3]设计出一款仿生弹跳机器人,该机构有三条腿,实现缓冲功能的是一条跳跃腿,另外两条腿是支撑辅助腿,辅助腿的作用是为了防止机构着陆时发生侧翻。国内方面,2013年北京航空航天大学的陈殿生团队[4],根据蝗虫的生理特征和运动特性,研制出一种仿蝗虫跳跃机构。其腿部由柔性连杆、弹簧、关节和机体组成。该团体对此机构建立了动力学模型,并进行了理论分析[5],同时利用腿杆抗冲击法和能量分配法对此机构着陆缓冲时的腿部能量进行分配[6],最终得到此机构的着陆姿态和腿部能量分配关系的模型[7]。2016年,上海交通大学赵言正团队[8]研制出一种仿昆虫六足爬壁机器人,该机器人6条腿径向对称,每条腿上有3个电机驱动机器人移动,并配备了吸盘、电磁阀以及真空泵用于机器人的吸附运动。2017年,南京航空航天大学的杨斌[9]设计了一种空间仿壁虎机器人,该机器人利用三维传感器定量分析仿壁虎机器人的姿态并对其进行姿态调整,在机器人的足垫出黏附基底材料以增加腿部的黏附力,但没有对机器人的缓冲能力和动力学进行建模分析。
针对空间机器人碰撞方面,清华大学郭闻昊等[10]对空间机器人抓捕目标星的碰撞进行研究,并利用粒子群算法对机器人构型进行了优化;南京航空航天大学岳帅等[11]设计了一种油液-铝蜂窝缓冲器,以翻倒极限着陆工况为基础重点研究了多级缓冲器缓冲参数对着陆稳定性能的影响,实现了较好的着陆器缓冲性能;之后,贾山等[12]提出了一种缓冲/行走一体化六足着陆器,重点对其运动学和步态进行了规划研究,设计出了较好的步态。
对上述文献分析发现,文献[1-3]其研究的重点在于机器人的起跳、缓冲能的释放与回收以及腿部的减震效果,而对机器人的缓冲及吸附过程未涉及过多的研究。而文献[4-7]重点研究的是机器人或仿生机构的缓冲性能,并没有实现对目标物表面的黏附功能。文献[8-9]重点研究的是机器人的吸附状态,分别使用了吸盘和黏附基地材料增加吸附性能,但对于仿生机构的动力学理论尚未做分析。文献[10-11]的研究重点在于利用算法和铝蜂窝材料实现缓冲作用,而对于应用机械腿式结构实现缓冲未做研究。文献[12]重点研究的是着陆器的运动学和步态分析,而对于着陆器着陆缓冲的关键动力学分析未进行介绍与研究。
本文将以蝗虫的生理结构和运动特征为灵感,设计一种仿蝗虫腿的空间缓冲吸附机构;并对其进行动力学分析和简化模型后的碰撞动力学分析;最后结合机构实际缓冲状态求得其关键缓冲参数,从而有效减小机构所受碰撞力且保证其不发生回弹。
1 空间缓冲吸附机构模型的建立
1.1 蝗虫结构和运动机理
蝗虫的后腿较为发达,其弹跳运动和着陆缓冲主要依赖于后腿。如图1所示,蝗虫的后腿由胫节、关节、伸肌键、股节、曲肌腱、伸肌和曲肌共七部分组成。胫节和股节由转动关节连接,并通过股节肌肉与躯干连接。

图1 蝗虫后腿内部生理结构图Fig.1 Internal physiology of hind legs of locusts
蝗虫的运动过程包括三个阶段,即起跳、腾空和着陆。起跳时,蝗虫的后腿向地面施压,腿部肌肉形成弯曲和折叠状,当蓄力完成后突然释放肌肉,从而完成跳跃。此过程腿部肌肉包括储存能量和能量释放两个过程,对应的运动为后腿的折叠和伸展两个运动。后腿折叠时,腿内的曲肌收缩带动曲肌腱;后腿伸展时,伸肌收缩带动伸肌键。蝗虫弹跳的能量除了部分存储在肌肉中外,还有部分存储在半月结构中,如图2所示。蝗虫后腿的胫节和股节通过弹簧状的半月结构相连,起跳前,蝗虫的腿部肌肉会带动半月板;起跳时,半月板瞬间释放能量促使蝗虫腿部胫节向后运动,从而完成整个蹬地的动作[13]。

图2 蝗虫后腿能量存储结构示意图Fig.2 Schematic diagram of energy storage structure of hind legs of grasshoppers
蝗虫在落地阶段,其足部先着地,腿部关节向下缓冲至自身速度降为零。后足的股节和胫节由伸直状态转换为褶皱状态,形成类似弹簧的缓冲效果,从而产生稳定的落地动作。此时,腿部股节的纵向肌肉由自由状态转变为拉直状态,部分动能和势能转化为弹性能,存储在肌肉和半月结构中。在整个跳跃过程中,蝗虫能有效地进行能量的转化并保持自身的平衡。
1.2 空间缓冲吸附机构原理图与样机设计
根据上文蝗虫生理结构与功能仿生原理,设计机构腿部为弹性多腿式构型,如图3所示,其与蝗虫腿部结构形成仿生映射。其中,关节1和关节2为转动副,用于机构的缓冲和压缩;关节间安装扭簧,用于将机构接触碰撞时的动能转化为弹性势能;关节3为球副,用于适应接触目标物表面的构型。

图3 弹性多腿式构型原理Fig.3 Schematic diagram of elastic multi-leg configuration
通过以上构型原理设计的空间缓冲吸附机构的实验样机如图4所示,图中标有具体零部件。原理样机腿部呈圆周阵列分布,通过单向轴承驱动关节压缩,足垫底部黏附有干性粘合剂[14]。

图4 空间缓冲吸附机构原理样机Fig.4 Cushion mechanismprincipled sample machine
2 空间缓冲吸附机构受力分析
2.1 空间缓冲吸附机构单腿受力分析
首先建立空间缓冲吸附机构单腿的力学模型。第i条腿的受力分析示意图如图5所示。
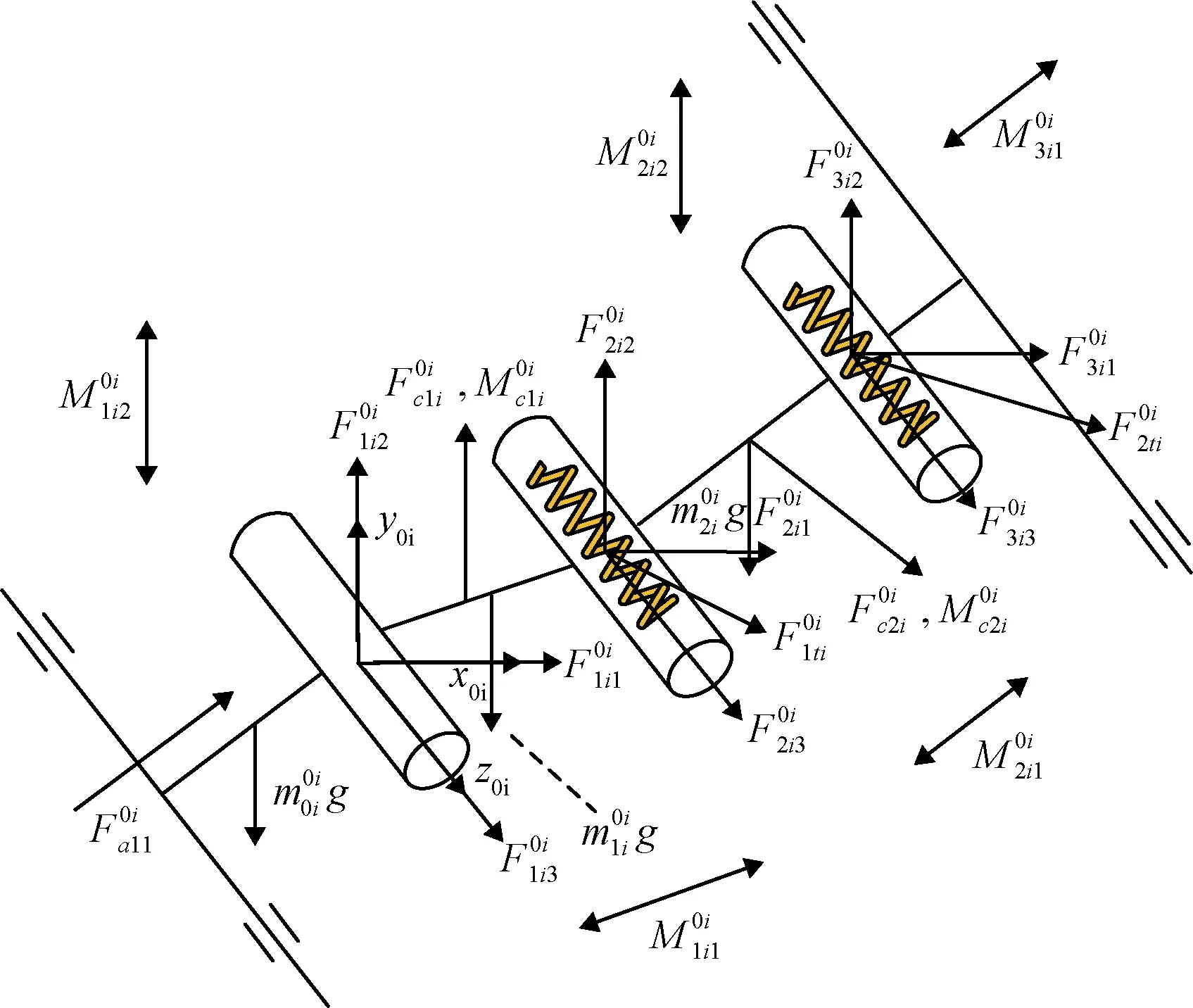
图5 空间缓冲吸附机构单腿受力分析图Fig.5 Force analysis diagram of single leg of buffer mechanism

(1)


(2)

将式(2)中胫节和股节的力平衡方程转化为关于基盘的平衡方程,表达式如下:
(3)
将式(3)分别代入胫节和股节的力矩平衡方程中,得到股节连杆相对于基盘关于y0i的力,这个力是关于空间缓冲吸附机构缓冲距离、缓冲速度和缓冲加速度的函数,表达形式如下:
(4)
2.2 空间缓冲吸附机构整机受力分析
和上文对空间缓冲吸附机构第i条腿的受力分析类似,建立空间缓冲吸附机构整机动力学模型。当机构六腿同时着陆缓冲时,空间缓冲吸附机构整机受力分析图如图6所示。
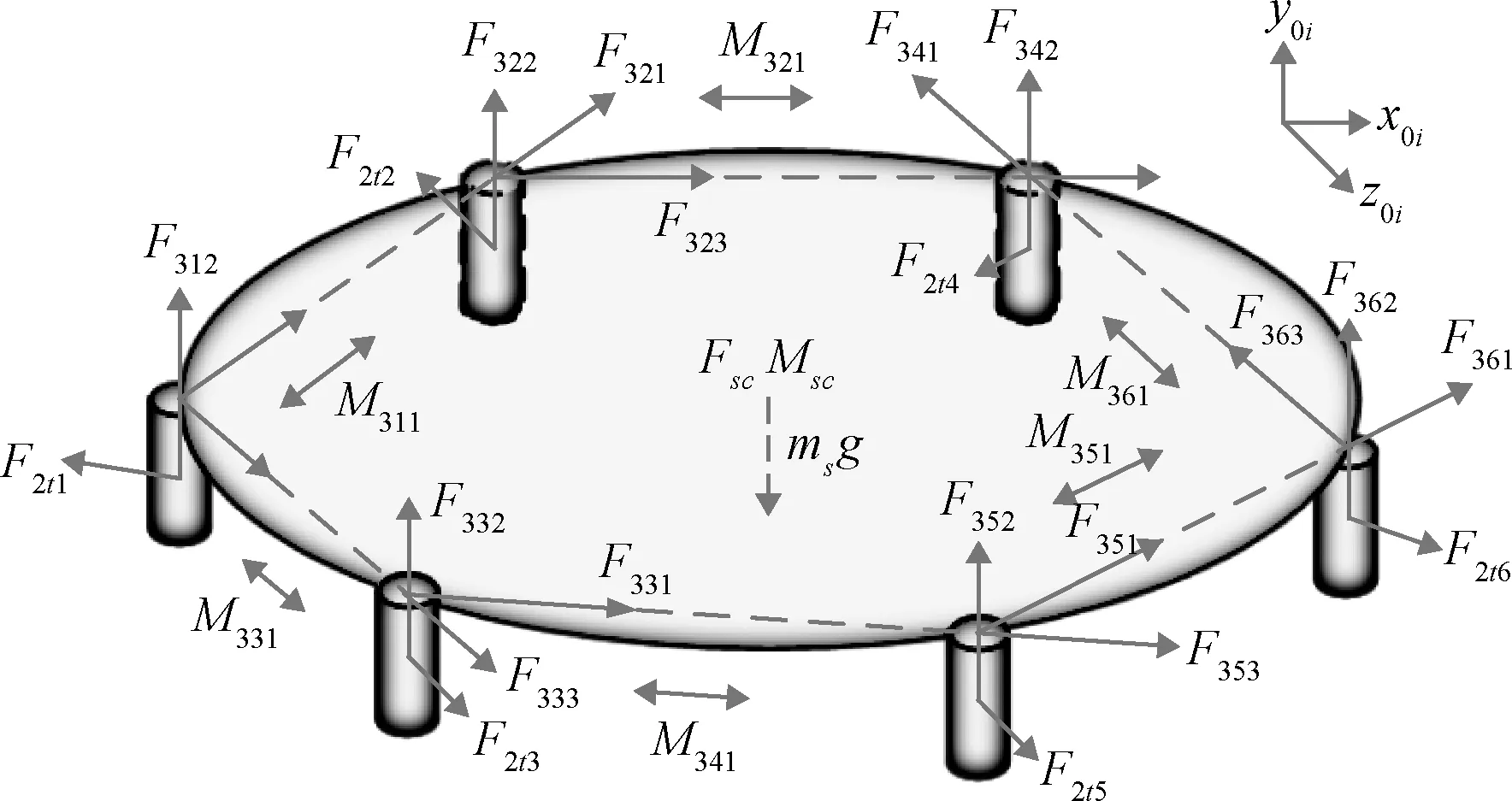
图6 空间缓冲吸附机构整机受力分析图Fig.6 Buffer mechanism force analysis diagram

(5)
3 空间缓冲吸附机构碰撞动力学和缓冲参数设计
3.1 空间缓冲吸附机构碰撞动力学建模分析
由于空间缓冲吸附机构的动力学状态复杂,不宜数学求解,故本文通过建立碰撞动力学模型对机构的运动状态进行分析。首先需要对机构缓冲碰撞进行如下假设[15]:
1)目标物表面的刚度为无限大;
2)太空微重力环境下重力加速度为0;
3)碰撞接触力为连续的等效弹簧阻尼力;
4)空间缓冲吸附机构与目标物的碰撞形式为线性质量弹簧阻尼系统;
5)碰撞产生的频率远大于空间缓冲吸附机构内部的频率;
6)目标物的质量远大于空间缓冲吸附机构的质量;
7)碰撞内所有接触都为点接触。
根据以上假设,建立空间缓冲吸附机构碰撞黏附目标物原理图以及碰撞动力学模型,如图7所示。

图7 空间缓冲吸附机构碰撞粘附目标物原理图Fig.7 Schematic diagram of space adsorption mechanism colliding and adhering target objects
在空间碰撞过程中,系统主要的参数是刚度系数和阻尼系数,刚度系数和阻尼系数对应的计算参数是接触时间和恢复系数,简化模型后可以用空间缓冲吸附机构的刚度系数和阻尼系数来代替。其中,接触时间是指空间缓冲吸附机构和目标物碰撞的时间,恢复系数是指碰撞后空间缓冲吸附机构和目标物的相对速度比上碰撞前空间缓冲吸附机构和目标物的相对速度,恢复系数越小则机构碰撞后反弹越小,为0时表示空间缓冲吸附机构和目标物共同运动。

(6)
式中:kc和cc分别是空间缓冲吸附机构腿部末端足垫碰撞目标物表面的刚度系数和阻尼系数,xt和xf分别表示目标物mt和空间缓冲吸附机构腿部末端足垫mf的位置,mt是空间目标物的等效质量,mf是空间缓冲吸附机构末端足垫的等效质量。根据式(6),可得图7中各质量体的动力学方程为:
(7)

假设图7所示模型不存在阻尼,即恢复系数为0,则空间缓冲吸附机构碰撞的频率可以表示为:
(8)
式中:ωf,ωc和σ分别表示为:
(9)

(10)
根据建模假设条件(5),碰撞产生的频率远大于空间缓冲吸附机构内部的频率,即ωf≪ωc;根据建模假设条件(6),目标物的质量远大于空间缓冲吸附机构的质量,即mf≪ms,ms≪mt,因此,可得:
σ≈1
以上分析情况为机构不存在阻尼,而在实际碰撞的情况下,机构必然存在一定的阻尼。本文已假设碰撞产生的频率远大于空间缓冲吸附机构内部的频率,所以在实际情况下,碰撞面接触产生的频率会比空间缓冲吸附机构自身产生的振动频率衰减的更快。所示上式可以用空间缓冲吸附机构的振动频率来等效替代:
(11)
式中:ωf表示为:
(12)

(13)

图8 空间缓冲吸附机构碰撞目标物动力学简化模型图Fig.8 A simplified kinetic model diagram of a space adsorption mechanism impacting a target
此时,碰撞动力学方程可以表示为:
(14)
式中:y表示为空间缓冲吸附机构弹簧的位移量。
3.2 空间缓冲吸附机构缓冲参数的设计
(15)
式(15)表示空间缓冲吸附机构碰撞目标物表面后机构的振动方程。式中:ω表示空间缓冲吸附机构的固有频率,表示为:
(16)
式中:γ表示碰撞时的阻尼系数,表示为:
(17)
由式(15),可得空间缓冲吸附机构的碰撞时间为振动频率周期的一半,表示为:
(18)
由上式可得,阻尼系数的取值范围为0≤γ≤1。
如果当阻尼系数大于1时,根据公式(18),则表示空间缓冲吸附机构与目标物平面的碰撞时间为无穷大。根据求得的接触时间,可以求得空间缓冲吸附机构碰撞时的刚度系数,即等效为求解空间缓冲吸附机构的恢复系数ε,通过式(18)可得:
2.2 测定方法 用卷尺测定树高、冠幅、干高,用角度尺测量枝条开张角度;处理组和对照组骨干枝上选取饱满度一致的侧芽134个,调查萌发率、抽生新梢类型;处理组和对照组各选取134条中短枝,调查顶花芽数量;全树采果测定产量。
(19)
式中:阻尼系数取值范围同样为0≤γ≤1,当阻尼系数大于1时,此时碰撞恢复系数方程不成立,即恢复系数为0,表示空间缓冲吸附机构和目标物粘合后一起运动。
根据机构的设计要求,本文设计的空间缓冲吸附机构要求机构碰撞目标物后粘附在目标物的表面,即机构不发生反弹或反弹概率极小,所以这里以碰撞恢复系数为0的理论值代入公式进行设计,即阻尼系数大于1的情况。根据原理样机的实际质量为1.3488 kg,且目标物的质量远大于空间缓冲吸附机构的质量,设定目标物的质量为10000 kg,碰撞时空间缓冲吸附机构与目标物平面接触的是机构腿部的足垫,根据假设,其质量又远小于空间缓冲吸附机构的质量,为0.0192 kg,可求解得:
1.3486 kg
空间缓冲吸附机构的恢复系数方程如式(17),将质量系数代入式(17)中,等式两边平方,可得关系式
(20)
令碰撞恢复系数方程为1.01,得
(21)
此时,取空间缓冲吸附机构扭簧的总刚度系数为0.8 N/mm,得阻尼系数为6.635×10-2N·s/mm。
3.3 仿真校验
利用ADAMS动力学软件对上述缓冲参数进行仿真校验。将机构缓冲参数分别设置为不同的刚度系数和阻尼系数模拟碰撞的过程,空间缓冲吸附机构的接触速度为0.6 m/s。仿真校验的参数根据缓冲参数大于1和小于1进行设置,同时根据空间缓冲吸附机构的回弹情况,参数序列1、2、4为缓冲参数大于1的情况,即空间缓冲吸附机构不发生回弹;序列3为缓冲参数小于1的情况,即空间缓冲吸附机构发生回弹。序列1、2、4通过控制系数法进行参数设置,其中序列2是未计算优化前的机构缓冲参数。如图9所示是空间缓冲吸附机构仿真碰撞前后状态的示意图。通过仿真得到如图10所示的碰撞力结果曲线图和如表1所示的仿真结果集。
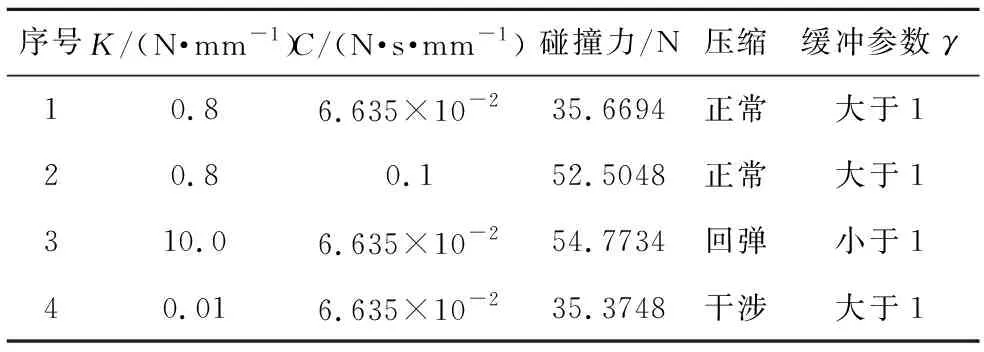
表1 ADAMS仿真结果集Table 1 ADAMS simulation results
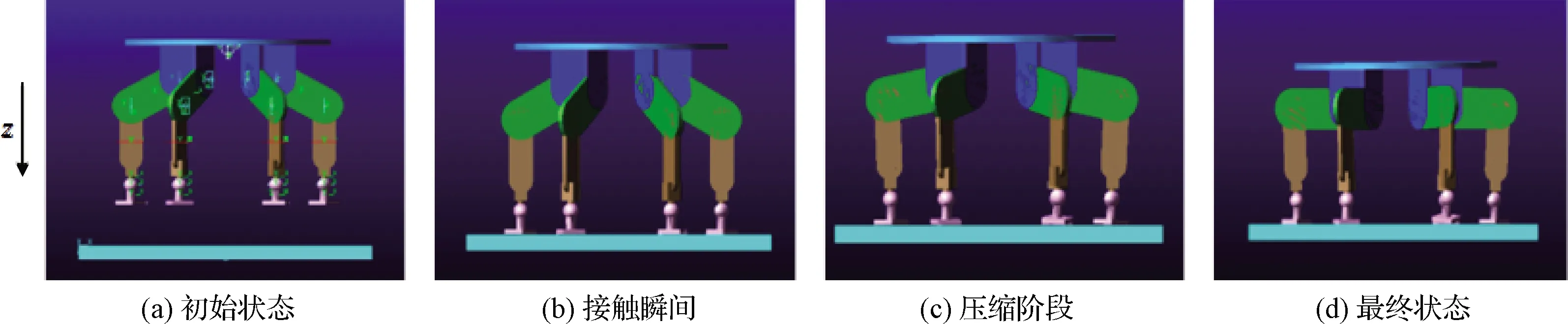
图9 空间缓冲吸附机构仿真碰撞前后示意图Fig.9 Buffer mechanism simulation collision diagram

图10 ADAMS仿真结果曲线图Fig.10 Diagram of ADAMS simulation results
通过仿真结果可知,在机构不发生回弹的情况下,当空间缓冲吸附机构扭簧的刚度系数一定时,阻尼系数越大,空间缓冲吸附机构所受碰撞力越大,对机构缓冲不利;当阻尼系数一定时,扭簧的刚度系数越小,机构所受碰撞力相差不大,但由于扭簧刚度不够,此时空间缓冲吸附机构腿部与上端圆形承载台发生了内部碰撞。当阻尼系数一定时,扭簧的刚度系数越大,机构所受的碰撞力越大,同时空间缓冲吸附机构发生了回弹,导致碰撞时间变长,不符合机构实际的功能需求。
表1中,“正常”是指空间缓冲吸附机构压缩过程正常,具体是关节正常压缩、未发生回弹且没有发生其余碰撞等现象;“回弹”是指空间缓冲吸附机构碰撞后由于缓冲参数设置的原因导致机构发生了回弹,具体是空间缓冲吸附机构碰撞目标物后弹起再落下;“干涉”是指空间缓冲吸附机构压缩后关节和圆形承载台发生了内部碰撞,具体是腿部关节碰撞到圆形承载台的下方。通过仿真校验分析,验证了本文缓冲参数设计的合理性和正确性。
4 结 论
1)本文设计了一种新型仿蝗虫腿的非合作空间缓冲吸附机构,并且提出了空间缓冲吸附机构缓冲碰撞过程的动力学模型。采用连续性碰撞方程进行研究,将空间缓冲吸附机构等效为线性弹簧阻尼结构。再结合实际缓冲碰撞模型参数设计了空间缓冲吸附机构的缓冲参数。
2)仿真结果相较于未计算优化的刚度系数和阻尼系数,机构所受碰撞力已大幅度减小约32%(序列1与2对比),且未发生回弹和干涉现象。表明该方法的合理性和正确性。本文对于空间缓冲吸附机构一次性着陆缓冲具有一定的理论意义和工程应用价值,适用范围为可等效为弹簧阻尼结构的腿式缓冲器与结构。
