基于透射原理的液面变形测量方法综述
2021-11-09吴东亮黄先富钟梦林刘战伟
黄 耀,吴东亮,黄先富,钟梦林,杨 洋,刘战伟*
(1. 北京理工大学 宇航学院,北京 100081; 2. 北京卫星环境工程研究所,北京 100094;3. 中国科学院 力学研究所,北京 100190; 4. 中国航发北京航空材料研究院,北京 100095)
0 引言
在航天工程领域,液体推进剂(液体燃料)因具有工作可靠、燃烧效率高、比冲大、性能稳定等诸多优点而作为主要能源和工质在大型运载火箭、卫星以及空间飞行器上得到了广泛应用。但是由于液体本身的高流动性,液体燃料在航天器的发射段,以及变轨、交会对接等过程中将不可避免地发生剧烈晃动,会对航天器整体产生显著的干扰力、干扰力矩及冲击压力;一旦晃动产生的这些干扰载荷超过控制系统可调节范围或结构所能承受的上限,将造成姿态控制系统的不稳定甚至结构破坏。液面变形的表征是研究晃动液体的重要方式之一。其表征方法主要有透射、反射(镜面反射)和侵入性(例如示踪粒子)3 类,其中:反射类方法适用于曲率较小的液面变形测量;侵入性方法由于要施加示踪粒子,会在一定程度上改变液体的性质;基于透射(折射)的光学表征方法根据原理不同主要可以分为相位偏折法、畸变分析法和光线追踪法,已经广泛应用于微小液面静态变形的表面张力、液面动态水波传递、液体动态晃动的振型等研究方向。本文介绍透射类的液面变形表征方法,希望为液体晃动振型、晃动控制以及其他液面相关的研究方向提供参考。
1 相位偏折法
相位偏折法根据光学原理的不同可以分为反射式和透射式,其中反射式相位偏折法灵敏度高、抗噪性强,在镜面表面测量的应用方面已经有不少研究。液面是类镜面的表面也可以使用反射式相位偏折法测量;但由于背景显示屏的大小和相机视场的限制,目前反射式相位偏折法在液面测量上主要应用于小曲率液面变形。
本文主要介绍透射式相位偏折法,且以下所提的相位偏折法均指透射式相位偏折法。相位偏折法最早应用于测量相位物体导致的相位变化。在Gómez-Pedrero 等发现了可以通过偏折角积分出光通过相位物体的波面变化后,有许多关于高温气体、透镜等相位物体造成的波面变化的研究。随后Lee 等进一步对偏转角与相位物体表面形貌之间的关系进行研究,发展了一种测量透镜双表面形貌的方法——双波长液体偏转法。通过分析CCD 相机拍摄到的红绿周期单向条纹的相位变化,求解了透镜上下表面的形貌。Liu 等 [29]对这种方法进行了改进,只使用白光进行照明,先在光源部分由条纹改为点阵,不需要进行条纹变向的操作。同时使用了几何相位分析法(geometric phase analysis,GPA)来分析经过待测透镜后点阵的相位变化,获得了较高的计算精度。最终计算重建出的透镜上下表面形貌与设计值如图1(a)所示,通过透镜几何中心的平面与透镜上下表面相交的轮廓线测量值与设计的标准值对比如图1(b)所示。

图1 LIU 使用相位偏折法的透镜形貌测量实验结果[29]Fig. 1 Liu’s experimental results for the len’s shape obtained by phase deflectometry[29]
基于上述两种测量透镜形貌的方法,Tang 等发展了一种测量双层液面动态变形的方法。先后使用红绿激光点阵和带有红绿点阵LED 显示器作为光源测量了水与硅油所形成的双层液面动态变形。使用红绿激光点阵的实验装置如图2 所示,通过使用平面镜获取液面边缘的积分初值,简化了实验装置。将给定体积的水与硅油倒入水槽,互不相溶的两种液体上下分层,通过重建的液面计算两种倒入液体的体积与给定值对比,验证了方法的可靠性。

图2 双层液面测量装置示意[31]Fig. 2 Experimental setup for double-layer liquid surfaces[31]
关于硅油上下表面斜率的方程组为
通过几何相位分析后得到相位场,最终测得的部分双层液面动态变形如图3 所示。
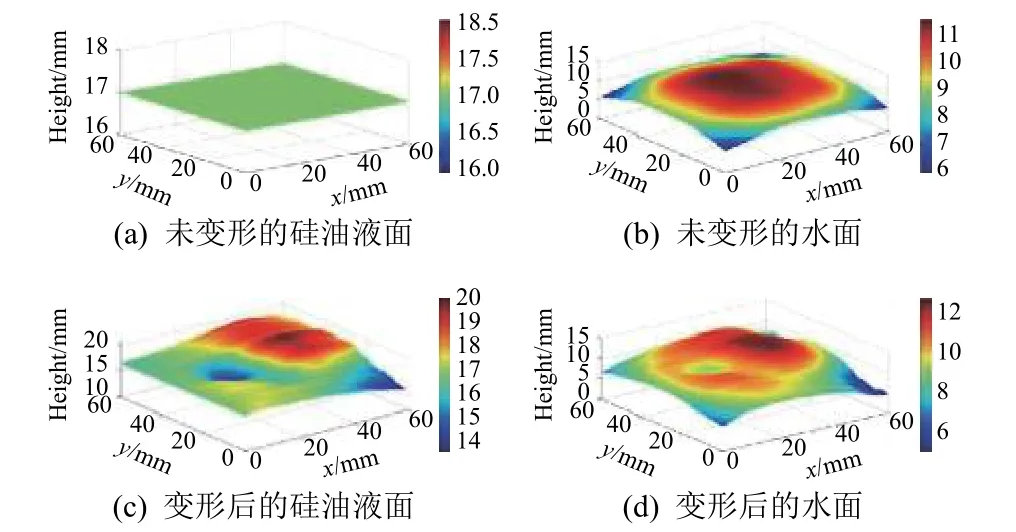
图3 Tang 使用相位偏折法的双层液面测量结果[31]Fig. 3 Tang’s measurement results for double-layer liquid surfaces obtained by phase deflectometry[31]
相位偏折测量法可以实现小梯度的双层液面的动态测量。在积分得到形貌信息时,可以灵活地挑选合适方向进行积分计算,最后通过加权平均减小实验误差。由于分析过程中对光路进行了近似处理,要求测量方向上的斜率较小,所以对于各方向斜率均较大的液面变形,测量误差有可能增大。
2 畸变分析法
液面的畸变分析法来源于透明物体的畸变分析法。利用透明物体的透射性与光的折射原理,分析信息载体在折射作用下的畸变信息与透明物体形貌之间的关系,实现透明物体三维形貌的重建。对于单次折射,单视点下的测量方法无法避免法线深度歧义性,如图4 所示。对于参考平面上一点发出的入射光,经过水面折射后进入相机,水面的位置与法线的方向有多种可能。因此在液面小变形条件下,早期的畸变分析法使入射光线与折射光线都接近竖直方向,认为入射角与折射角的角度与其正弦值、正切值近似一致。通过光流法近似计算出偏折角大小,从而得到液面的表面梯度,最后通过数值积分来得到整个液面形貌。由于在数据处理中使用的近似较多,导致这种方法的误差较大。
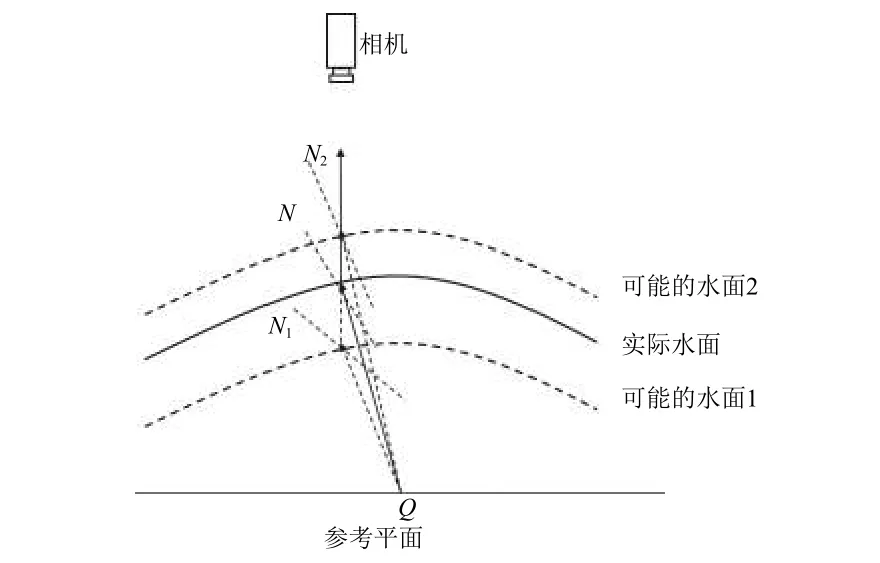
图4 单视点的法线深度歧义性Fig. 4 The ambiguity of normal depth in single viewpoint
针对液面重建的折射问题,刘战伟等选择采用牛顿迭代法来计算液面高度,获得了更高的测量精度。其光路原理如图5 所示。
图5(b)所示为图5(a)中变形液体的一个剖面,对图5(b)中变形液体的剖面曲线进行分割,分割次数足够多时,分割形成的每一小段弧线可以近似看作直线。在任意一个端点N
处,可以根据斯涅耳定理、直角三角形ANA
′中的三角几何关系以及直角三角形NPN
中的三角函数关系,建立方程
图5 畸变分析法透射光路原理示意[37]Fig. 5 Schematic diagram of the transmission of shape obtained from distortion[37]

n
是液体折射率;θ
和φ
分别为光线在点N
处发生折射时的入射角和出射角;S
(x
,y
)为点N
处对应的信息载体虚像位移;H
为液面变形前的初始液面高度;h
(x
,y
)为N
点的液面高度变化值,初始为0。将位移场代入式(2),在横坐标方向上逐点迭代求解,得到一条剖面曲线上各点的液面高度,在纵坐标方向均匀取液面的多条剖面高度,最终实现全场液面形貌的重建。这样就将液面形貌的测量问题转化到信息载体虚像的位移计算上。
刘战伟等采用单向光栅作为信息载体,在玻璃水槽上方放置一参考光栅,水槽下方的试件栅会因水面变形的折射而使得从上方拍到的试件栅发生扭曲,从而与参考光栅叠加形成云纹。然后利用几何云纹法的基本原理得到了液面底部试件栅的虚像位移,重建出硬币漂浮时的液面形貌。根据重构的液面形貌定量计算了硬币所受浮力与表面张力的合力和硬币自身重力间的数量关系。随后Liu 等发展了这种方法,通过采用正交光栅作为信息载体,使用液面未变形时拍摄到的正交光栅作为参考栅。这样不再需要在水槽上方放置参考栅,简化了实验装置。这种采用透射光栅条纹的方法被称之为透射条纹法,可以同时从两个方向上获得虚像的位移,相比较单向光栅可以得到更准确的位移场。
Zhong 等和Huang 等对透射条纹法进行了研究,分别发展了不同的提高测量精度的方法。Zhong 等结合在固体的变形与应力应变测量中应用十分广泛的采样云纹方法,发展了亚像素采样云纹法,提高了相位的测量精度并且对不连续的液面测量效果更好(如图6 所示)。Huang 等则发展了透射条纹四步相移法,结合相移技术后液面深度变化的理论测量灵敏度从μm 级提高到了1 nm;半径为1.58 mm 的聚四氟乙烯小颗粒漂浮下的重构液面与不同半径下通过漂浮颗粒中心的液面剖面线如图7 所示;最后根据重构的液面形貌,研究了表面张力与颗粒半径之间的关系:当颗粒半径较小时表面张力对漂浮的贡献较大,随着颗粒半径的增大,表面张力的贡献占比逐渐减小并在特定半径时突然消失,颗粒沉没。

图6 透射条纹亚像素采样云纹法液面变形测量实验[39]Fig. 6 Water surface deformation measured with sub-pixel sampling moiré method[39]

图7 漂浮颗粒液面变形测量结果[10]Fig. 7 Experimental results of water surface deformation caused by floating particle[10]
透射条纹法的光栅主方向与水平方向或竖直方向存在难以消除的倾斜或转角误差,单向的迭代计算方法误差容易累计,条纹处理也相对复杂,不便于液面变形的动态测量。针对液面的动态变形,Liu 等提出了透射散斑法,使用散斑作为信息载体,结合数字图像相关(Digital Imagine Correlation,DIC)可以方便地从多个方向计算位移,信息载体的位移计算更为简便。Liu 等用透射散斑法测量了水黾漂浮时的液面形貌,根据液面形貌计算了水黾所受到的浮力与表面张力的定量关系,并发现其口器分泌的油脂有效时间在2 h 以内。Shi 等则发展了使用点阵作为信息载体的透射点阵法,结合几何相位分析法重构了水滴落入水面造成的液面动态变形。
上述方法均需要某处未变形的液面作为初始高度,以此作为迭代初值计算液面的形貌,针对的是发生部分变形的液面,不能应用于整体发生变形的液面。而航天器飞行过程中燃料箱内的液体燃料晃动导致的液面变形为整体动态变形。为了能够测量一个完整的晃动液面,需要在容器侧面增设一个相机拍摄边缘液位,从而得到迭代初值。Yang 等通过增设平面镜,使用一个高速相机既能得到与器壁接触的液面高度,又能拍摄容器底部光栅虚像的位移;最后根据重建的液面同时能监测容器内液体的剩余剂量。部分重构的晃动液面的三相接触线如图8 所示。

图8 各时刻晃动液面轮廓的动态变化[51]Fig. 8 Profiles of the observed liquid level at different times[51]
针对容器底部为更加复杂的球面,Dong 等使用水转印刷技术,将条纹印刷到底部为球面的容器底部,测量了液体晃动形貌,从而获得液体晃动一阶和二阶的三维振型,与数值模拟的结果符合良好。部分二阶振型重建结果如图9 所示。

图9 激振频率为2.8 Hz 时各时刻重建的二阶模态三维液面形貌[52]Fig. 9 3-D morphology evolution of second modal shape at corresponding times when the excitation frequency is 2.8 Hz[52]
畸变分析法能根据待测的液面变形特征,灵活挑选合适的信息载体,装置简单方便,现已经成功应用于微小漂浮物的表面张力测量、液体晃动振型等静态和动态单层液面变形测量领域。但在液面重建原理中,需要能准确采集到位于液面底部信息载体的畸变情况,而且牛顿迭代法会将每一步的误差累计,因此对于液面曲率较大的变形,测量误差可能较大。
3 光线追踪法
区别于畸变分析法中以牛顿迭代法来解决法线深度的歧义性,有研究通过确定整个光路来测量折射表面的空间位置。这部分的理论内容参见文献[54-55],其中双目问题的确定性原理如图10 所示。在双目问题中,对于水面上的一点发生的折射光路,会有2 条折射光线的所在的直线被确定,通过标定的相机即可得到这2 条直线位于水面的交点。在实际应用中,主要有法线一致性约束与折射视差约束两种方法来确定液面位置。

图10 双目系统的折射光路示意图Fig. 10 Schematic diagram of refraction light path of binocular system
随后使用双相机或多相机的液面测量方法逐渐发展起来。多相机一般用来应对某个相机成像效果欠佳的情况,这时可以使用其他相机代替成像;或者用来检验重建的液面形貌是否足够准确。Morris 等以黑白棋盘格作为信息载体,以黑白方形的顶点作为特征点,使用标定的相机,结合光流法重建了多种液面动态变形。
使用黑白棋盘格所提取的特征点较为稀疏,因此只能测量较为平滑的水面。Qian 等通过使用散斑作为信息载体,增加一个检验相机,结合DIC增加了可使用液面重建的点数,增大了测量范围并提高了测量精度。其测量结果与Morris的方法的对比如图11 所示。

图11 Qian 的测量方法与Morris 的测量方法的比较[58]Fig. 11 Comparison between Qian’s water surface measurement method and Morris’[58]
另有一些通过使用特别的光源来达成光路确定的方法。Wetzstein 等通过使用光场探针作为光源,可以发出信息已知的入射光线;标定的相机可以得到对应的折射光线,求解入射光线与折射光线的交点即可得到液面上的折射顶点。这样通过确定入射光线,解决了单视点的深度法线歧义性,实现了单图像的液面重建。Wetzstein 重建的液面如图12 所示。
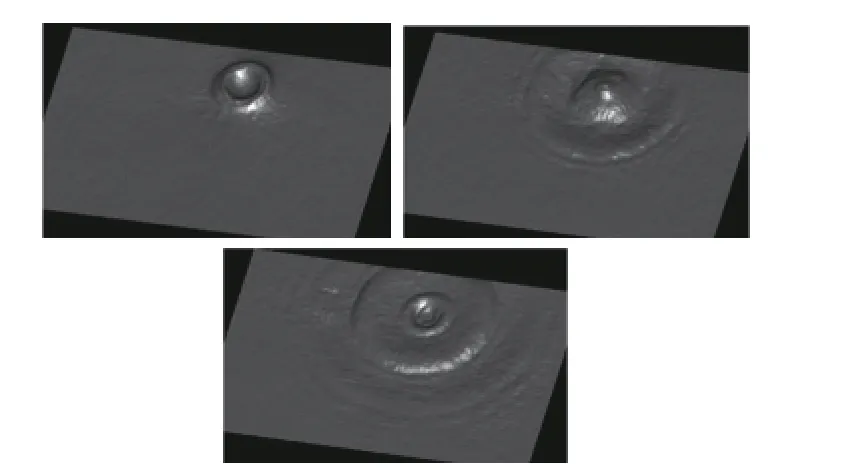
图12 Wetzstein 使用光场探针重建的液面动态变化[61]Fig. 12 Wetzstein’s reconstruction of the dynamic deformation of water surface with light probe[61]
Aureli 等则使用了可以同时发出近红外光和白光的光源,以及可以同时对可见光与红外光成像的相机。由于近红外光在水中的吸收率较大,因此搭配能拍摄近红外光的相机可以根据近红外光的衰减率计算出入射光线在水中经过的距离。使用彩色图案作为信息载体,根据可见光的成像可以得到折射光线的位置信息与入射光线的起点,根据近红外光的成像获取对应起点的近红外光在水中经过的距离d
,检索折射光线上到该起点距离恰好等于d
的点即为折射顶点,也就是液面的位置。原理如图13 所示。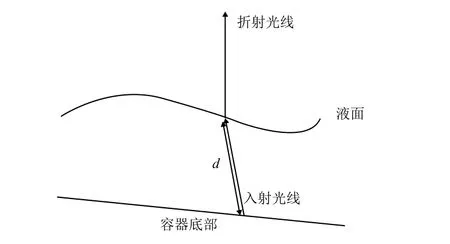
图13 结合近红外光测量液面形貌的原理Fig. 13 The principle of the liquid surface measurement by near-infrared light
4 其他透射类方法
在液面变形测量中还有一类使用透射激光的激光干涉法,主要有全息干涉法和剪切干涉法,基本原理为光的干涉。文献[63-64]记述通过对透明液体底部射入的平行激光束成像,采用双曝光干涉技术获得液面微小扰动下的干涉条纹,即用同一张全息底片记录透过液体变形前后的激光波面干涉得到干涉条纹。根据光程差与干涉条纹级数的关系,可得液面高度与干涉条纹级数的关系。Matsuda 等则使用横向剪切干涉仪测量了水黾引起的液面变形的一部分。
由于原理上是根据光的干涉来测量液面变形,因此激光干涉法具备极高的灵敏度,但同时在液面变形斜率较大时会不可避免地出现条纹过密难以分辨、测量失败的情况。这导致这种方法的量程一般在亚毫米或微米范围,通常<200 μm。另外,激光装置也相对昂贵,整体装置一般也较为复杂。这些原因导致近些年激光干涉法较少被人使用。
5 总结与展望
液面变形相关的研究既有重要的科研价值,也有实际的工程应用价值。由于液体流动性、透射强、反射弱等特点,使得传统的固体表面形貌测量技术大多不能直接套用到液体上。常用的液面变形测量方法中,基于透射的测量方法对液体性质没有影响,装置也相对简单,而且能测量具有较大曲率的液面变形。本文主要总结了三种透射类液面形貌测量方法,它们都可以实现单层液面变形的全场测量,其量程、灵敏度与优缺点总结如表1 所示。
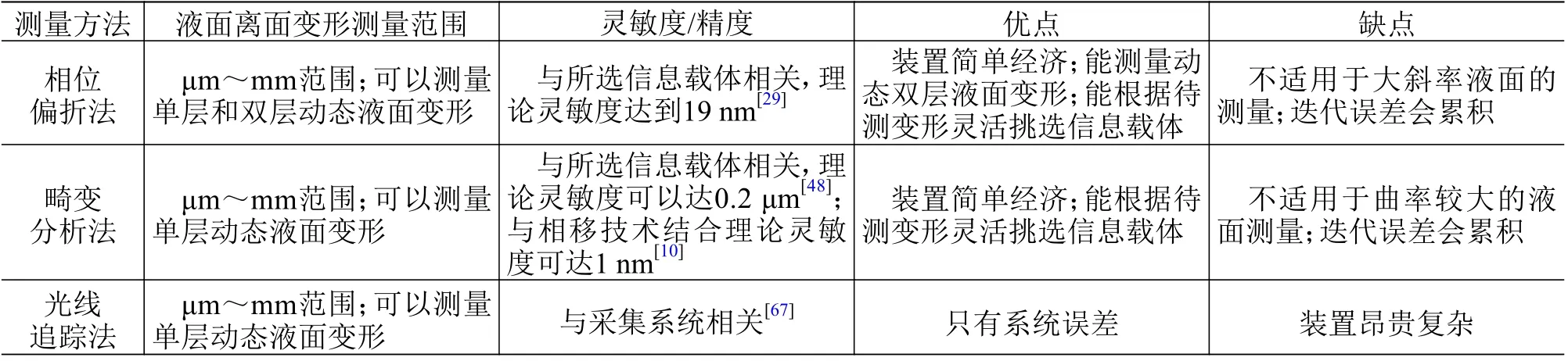
表1 三种透射式液面测量方法概述Table 1 Overview of the three methods for transmissive liquid surface measurement
目前透射类液体形貌测量方法对液面晃动等动态变形的全场测量有着良好的灵敏度,但较少谈及量程的限制。如图14 所示,F
为液面峰状变形的焦点,当F
位于底部信息载体上方时,会有类似凸透镜散焦的问题,即液面底部信息载体上一个点2'
会在相机里有两个成像点2。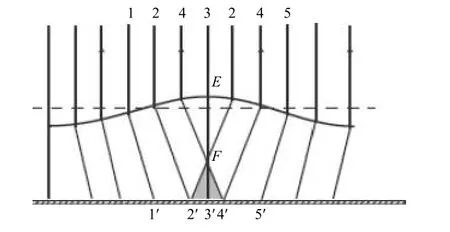
图14 大曲率凸液面的散焦问题Fig. 14 Defocusing caused by the interface with large curvature
结合薄透镜近轴成像公式,给出可测量液面的最大曲率与深度函数关系的理论公式

K
为点E
处峰状变形的曲率;l
为E
点的液深;n
为液体折射率;n
为空气的折射率;F
为此处峰状变形的焦点。从误差、效率和量程三个方面总结透射式液面变形测量方法的发展趋势如下:
1)在减小测量误差方面,发展光路近似误差的补偿方法与更精确的液面重建算法
液面变形的准确测量,离不开对透射测量方法误差来源的准确分析。目前透射测量方法的误差主要有:光路近似误差,折射视差测量误差(相机的镜头畸变、随机误差与背景图像位移测量方法的固有误差)和液面重建误差。
目前透射类液面变形测量方法在光路原理上均采用了近似光路,以简化分析与计算难度。这些光路近似带来不可避免的误差,并在液面微纳尺度变形测量中对测量的精度有着重要影响。如何衡量、减弱或者消除这部分光路近似误差,是透射类液面变形测量方法发展中值得研究的一个方向。折射视差测量误差中相机镜头畸变造成的误差已经有较多的补偿方法,而背景图像位移测量方法的固有误差则需要研究人员寻找或发展更好的位移测量方法。对于液面重建误差,3 种方法都存在数学上的近似误差,因此,发展更好的数学重建方法也具备相当的实际应用意义。
2)在提高测量效率方面,发展更高效的数据采集系统与更高效的液面重建算法
如前文所述,透射类液面变形的测量方法均需要数据采集系统,而且目前这些测量方法的液面重建效率都较低。无论是相位偏折法、畸变分析法的迭代过程,还是光线追踪法的深度检索过程,都需要大量的计算资源,一次液面的重建通常需要30 min 以上。因此,如何高效地采集并处理数据是提高液面变形表征效率中值得探究的一个方向,如文献[69]提出了一个局部液面优化函数,可以提高光线追踪法中液面高度的检索效率。同时,随着深度学习技术在计算机图像领域的应用,液面重建部分也可以考虑结合深度学习技术,如文献[70]结合神经网络来进行液面形貌的重建。
3)在拓宽测量量程方面,纳观尺度上发展厚度在几十埃到几百埃的液体前驱膜全场测量方法,宏观尺度上发展液体非线性大幅度晃动与海面潮汐等大变形、大曲率的液面变形全场测量方法。
