基于自耦PID控制的四旋翼无人机姿态控制
2021-11-08曹立佳
杨 旭,曹立佳,刘 洋
(1.四川轻化工大学 自动化与信息工程学院,四川 宜宾 643000;2.人工智能四川省重点实验室,四川 自贡 643000;3.四川轻化工大学 计算机科学与工程学院,四川 宜宾 643000)
1 引言
四旋翼飞行器作为无人机的一种,因其具有结构简单、体积小、重量轻、成本低、易于维护等优点,使得其在军事和民用领域都得到了广泛的应用[1-5]。虽然经过多年的研究,设计出了许多较为复杂的控制算法[6-8],且控制精度和速度都有很大的提升。目前国内比较普遍的飞行器控制算法主要包括:反步法、自适应控制、滑模控制、自抗扰控制等,但这些复杂的算法对于硬件的要求很高,所以四旋翼飞行器应用领域的主流控制方法仍是PID控制算法[9]。
文献[10]中介绍了基于传统PID算法设计的姿态控制系统,虽然能够很好地实现飞行器的自稳定控制,但是只能够在低动态状态下保证良好的工作性能,长时间运行,陀螺仪的漂移现象比较严重。文献[11]提出了一种不完全微分PID控制算法,在姿态控制环单级PID基础上,通过对3个方向的角运动进行仿真验证,仿真结果表明其具有相应速度快、鲁棒性强和自适应能力高等优点。但未说明滤波系数大小对系统影响的规律,并且串级PID控制的响应速度、干扰能力等明显优于单级PID。文献[12]中设计了一种PI-PD控制方式,PI和PD 两个控制器可以很好地在抑制系统超调量的同时克服PID控制器参数不易整定的缺点,但响应时间过长,鲁棒性也有待提高。
本文基于牛顿-欧拉定律和四旋翼六自由度刚体运动模型[13-19],建立一个四旋翼飞行器的简化非线性数学模型。采用自耦PID控制方法设计姿态控制回路,并通过Matlab/Simulink仿真平台,搭建相应的仿真模型来进行仿真测试和结果分析,最后,验证了本文控制方法的有效性和良好的控制性能。
2 四旋翼空气动力学模型
本文中所建立的四旋翼飞行器非线性数学模型,是采用空心杯电机作为驱动部件的微小型四旋翼飞行器。并且,使用文献[19]第四章的模型数据,进行仿真实验。
2.1 坐标系及变量的定义
要建立飞行器的动力学模型方程[14-15],参考坐标系的确定是必要的。为此引入地面坐标系和载体坐标系2个参考坐标系。
地面坐标系E(oexeyeze)位于地面上,取原点为地面上某一点Oe;Oexe轴在水平方向内,并指向飞行航迹方向;Oeze轴为过原点Oe的地面法线,且指向地心(垂直地面向下);Oeye亦在地平面内,并且垂直于Oexe轴,指向按右手定则确定。
载体坐标系B(Obxbybzb)与载体固连,为动坐标系。原点Ob取为飞行器的质心;Obxb轴在飞行器的对称平面内指向机头方向;Obzb轴在飞行器对称平面内与Obxb轴垂直并指向飞行器下方;Obyb轴垂直于飞行器对称平面并指向飞行器右方。
载体运动时,地面坐标系保持不变,载体坐标系随着飞行器运动而不断变化。地面坐标系与载体坐标系的关系如图1所示。
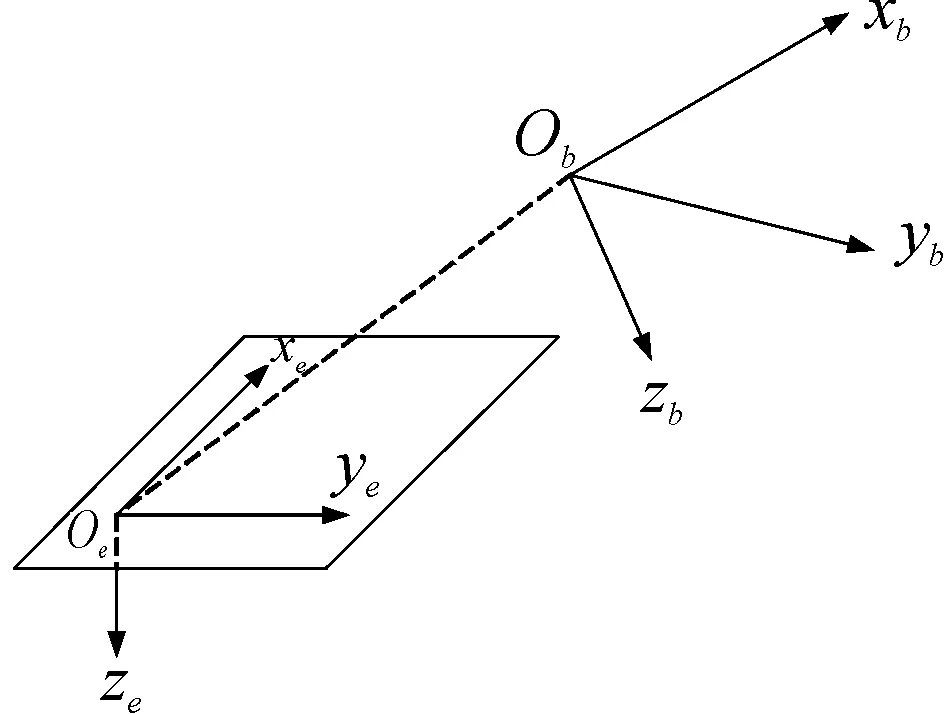
图1 地面坐标系和载体坐标系的关系示意图
相关变量的定义:飞行器相对于地面坐标系的位置变量由(x,y,z)确定;飞行器相对于地面坐标系中的速度变量由(u,v,w)确定;飞行器相对于地面坐标系的姿态角由(φ,θ,ψ)确定;飞行器相对于载体坐标系的旋转角速度由(p,q,r)确定。
地面坐标系E到载体坐标系B的转换可以通过转动偏航角ψ、俯仰角θ和滚转角φ实现,其转换矩阵Rbe[6,16]可表示为:
Rbe=[cosθcosψcosθsinψ-sinθ;
-cosφsinψ+sinφsinθcosψcosφcosψ+sinφsinθsinψsinφcosθ;
sinφsinψ+cosφsinθcosψ-sinφcosψ+cosφsinθsinψcosφcosθ]
(1)
2.2 数学模型
四旋翼飞行器的空间运动可以通过6个自由度来描述(3个平移速度和3个旋转速度)[6,17]。在此基础上,我们做出如下假设:飞行器为均匀对称刚体;机体几何中心和飞行器几何中心重合;忽略阻力系数。根据牛顿第二定律,动能定理和动量定理,可得四旋翼飞行器的刚体运动模型和动力学模型如下:

(2)

(3)
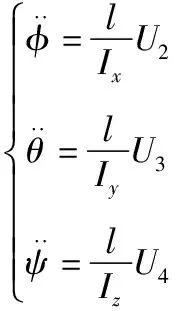
式(2)~(3)中:m为四旋翼机体质量;g为重力加速度;(x,y,z)为在地面坐标系下四旋翼在空间中的位置;(φ,θ,ψ)为四旋翼飞行器的姿态角;Ui(i=1,2,3,4)为旋翼在机体上产生的总升力和三轴力矩;Ix、Iy、Iz为旋翼和电机分别绕x轴、y轴、z轴旋转时的转动惯量;l为飞行器机体质心与其旋翼旋转轴二者之间的距离。

(4)
(5)
3 自耦PID控制算法
传统PID控制原理是将误差的过去(I)、现在(P)和将来(变化趋势D)进行加权求和来形成控制信号。这不异于强行将比例、积分和微分3个同属性的物理环节割离开来独立对待,由此导致了比例、积分和微分3个环节在控制过程中相互独立、各自为阵,因而缺乏协同控制的科学思想。
SC-PID控制器通过引入速度因子Zc,将比例、积分和微分3个不同属性的物理环节紧密耦合在一起,形成协同控制。使得在控制过程中表现出功能各异而目标一致的协同控制机理,且具有重要物理意义和应用价值。
文献[18]中给出的自适应速度因子模型如下:
Zc=α[1-0.9exp(-βt)]
(6)
传统的PID控制律为:
u=(kpe1+kie0+kde2)/b0
(7)
式(7)中:kp>0、ki=kp/ki和kd=kpTd分别是PID的比例、积分和微分增益,Td和Ti分别是微分时间常数和积分时间常数;e1、e0和e2分别为跟踪误差、积分误差和微分误差;b0≠0为控制通道增益的估计值(不要求精确)。
根据文献的设计思想,可得SC-PID控制器为:
(8)
将式(7)和式(8)进行比较可以得出SC-PID的整定规则为:
(9)
由上述SC-PID的增益整定规则,可得基于SC-PID的闭环控制系统模型如图2所示。
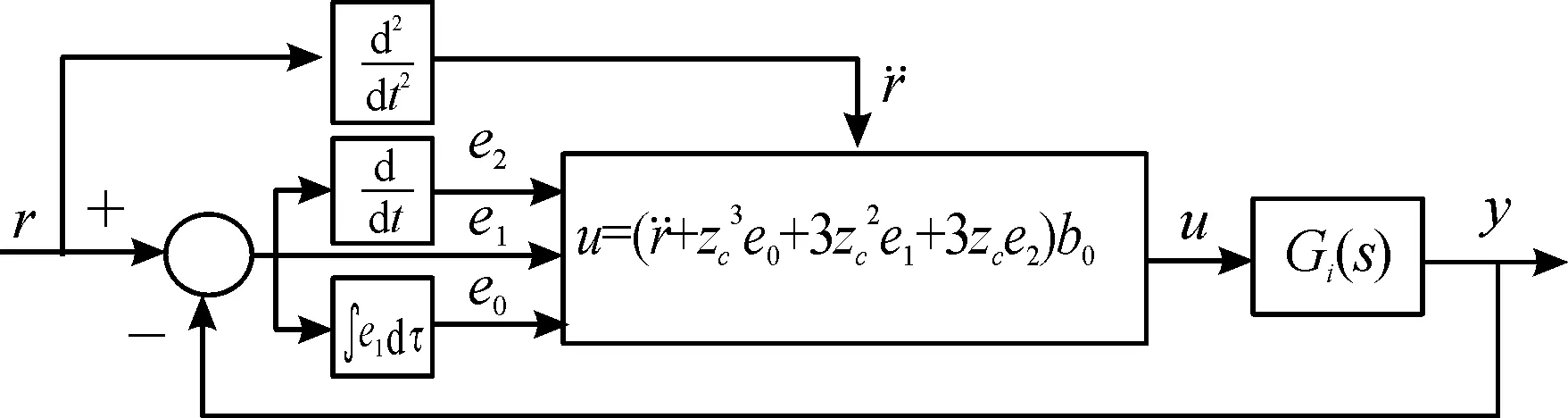
图2 SC-PID闭环控制系统模型框图
在SC-PID控制器合理性分析环节,文献[18]通过对SC-PID中不同环节的物理属性进行类比定性分析,明确了不同属性的环节通过速度因子进行量纲转换后,都成为了力的属性单元,并通过加权求和形成了控制器的合力,从而保证了该控制器设计的合理性。
将SC-PID控制器带入误差动态系统,分别从复频域和时域进行分析,可以得出SC-PID控制器组成的闭环控制系统是全局渐近稳定的,而且SC-PID控制器具有良好的抗总和扰动鲁棒性。详细的分析过程可以参考文献[18]。
由上述SC-PID的整定规则以及控制器的合理性稳定性分析,可以看出,SC-PID的控制方法与传统PID在理论证明上是具有相似性的。同样采用比例、积分和微分3个不同属性的物理环节进行控制,只是将PID调节过程中的3个参数,通过其内在联系减少为一个,但究其本质仍然是PID控制,具有和PID控制器等价甚至更好的控制效果。
4 飞行器姿态回路控制器的构建与仿真
4.1 姿态控制回路传递函数
为了方便对四旋翼飞行器姿态控制系统进行仿真,需要表示出姿态回路的传递函数。根据文献[19]中所设计的四旋翼飞行器,通过实验测定以及相关资料和特定参数的汇总,再结合模型函数,可以得到相关重要参数如表1所示。

表1 四旋翼飞行器重要参数
根据上述建立的四旋翼飞行器的非线性数学模型,再结合表1中给出的实验数据以及一些相关环境参数,代入到飞行器的系数矩阵,参照系统传递函数求解公式,可得到飞行器的姿态控制律。详细的求解过程可以参考文献[19]。
由此可得出,四旋翼飞行器姿态控制回路偏航、滚转、俯仰通道的传递函数分别为:
(10)
(11)
(12)
4.2 SC-PID控制器的设计
根据4.1节得出的四旋翼飞行器姿态控制回路偏航、滚转、俯仰通道的传递函数,结合前面给出的自耦PID控制算法。从而可以得出基于自耦PID控制算法设计的四旋翼无人机姿态回路控制器,其控制器结构如图3所示。

图3 基于SC-PID控制器的姿态回路结构框图
图3中Gi(s)(i=θ,ψ,φ)代表俯仰、偏航和滚转通道的传递函数。r表示各姿态通道的输入值,在本次实验中,定义r为阶跃输入:俯仰通道的输入rθ=1;滚转通道的输入rφ=1.5;偏航通道rψ=2。y为各姿态回路经过SC-PID控制器计算后的实际姿态角,y经过反馈与期望姿态角r相计算,从而得出各姿态角的跟踪误差e1、积分误差e0和微分误差e2。
关于α1值范围的确定,为了便于实际应用,对于快系统α1通常取10<α1<100;对于慢系统α1通常取1<α1<10。α1越大,系统的响应速度越快,抗扰动能力越强;否则反之。然而,在无人飞行器的姿态控制中α1不能过大,否则,因速度因子过大,在控制过程中很可能因为控制力过大而出现超调与振荡现象,因此要求α1<10。
4.3 SC-PID控制器的仿真分析
在Matlab/Simulink仿真平台中搭建姿态控制回路的仿真模型,再分别调节出了各个通道最优的速度因子Zc对应的α值,最终得到相应的阶跃响应曲线。然后将各个通道的传递函数与SC-PID增益整定规则相结合,根据4.2节中介绍的控制器设计方案,得到各个通道的Simulink仿真模型和实验仿真结果。在仿真的调节中,主要是对于速度因子Zc中的α的调节整定。由于前面SC-PID部分已经给出了β值的确定方法,β=1/Tt(Tt是由动态过渡到稳态的过渡过程时间),因此β的值在后续的调节中是固定值,不做任何调整。本次调节中因为各个姿态通道的传递函数不同,为了体现出系统耦合时的控制情况,各姿态回路采取不同的期望输入。同时所对应的最优α值也会有所不同,具体各个姿态通道α的对应值为:αψ=5.6、αφ=2.9、αθ=3.0。具体姿态控制回路的Simulink仿真模型和调节完善后的仿真结果分别如图4和图5所示。

图4 姿态控制回路仿真模型框图

图5 姿态控制回路仿真曲线
由图5可以看出,3个通道的控制系统约在2.0 s内便可以调节到稳定状态。在超调量方面通过图4可以观察到各个姿态通道仿真波形的超调量,均控制在20%左右。这表明,该控制方法能很好地降低系统的超调量,使系统的运行更加的稳定。对比于文献[20]中所给出的传统PID设计控制器,SC-PID控制器能够很好地降低超调量,并且使后续的稳态误差稳定接近于零。
为了解速度因子对于各个姿态通道的调节作用,选取俯仰通道为例,分别取用不同的α值进行仿真实验。α=2.5,用圆点线表示;α=3.5,用虚线表示;将α=3.0加入其中并用双点划线表示。仿真结果如图6所示。

图6 仿真结果曲线
根据图5和图6可知,系统在α=3.0时超调为8%,α=2.5时超调为6%,α=3.5时超调为19%,存在稳态误差范围内的震荡;系统到达稳态的时间分别为2.5 s、5 s、3.5 s;到达稳态后,稳态误差均维持在0.005%左右。可见在0<α1<100内,系统的超调量与α呈正相关,系统到达稳态的时间与α呈负相关,并且会随着α的变化而快速变化。经过上述对比可得,自适应速度因子Zc在调节系统时β是根据Tt确定下来的定常数,α起到主要调节作用,且α过高会增加超调量、α过低会增加系统到达稳态的时间。
为验证本文提出的SC-PID控制方法对非线性系统模型控制性能的影响。根据上文建立的四旋翼飞行器非线性数学模型以及姿态回路传递函数,融合SC-PID控制算法,对四旋翼飞行器非线性系统模型进行仿真试验。以系统中的偏航角控制为例,通过采用不同的速度因子α 值进行对比仿真试验,试验结果如图6所示。
根据图7可以看出当α=2时超调为30%,系统稳定时间为0.7 s;α=1 时超调为10%,系统稳定时间为0.8 s;α=0.5时超调为2%,系统稳定时间为1.5 s。根据试验结果可以看出,SC-PID控制器能实现非线性系统的有效控制,并且响应速度快,超调低,速度因子α对非线性系统的控制效果和线性系统的控制效果一致。同时,结合线性姿态控制回路的仿真实验结果,验证了SC-PID控制器对于线性模型和非线性模型等各种数学模型的被控对象的控制都是有效的。并且,本文的SC-PID控制方法将比例、积分和微分环节耦合在一起,使得控制结构更为简单,整定更加方便快捷。

图7 偏航角仿真曲线
5 结论
本文以四旋翼飞行器的姿态控制回路为实验对象,采用SC-PID控制器设计了整个四旋翼飞行器的姿态控制系统。通过对四旋翼飞行器的数学模型的建立、解耦和忽略次要影响因素,得到了3个姿态通道的传递函数,再结合SC-PID控制器在Matlab/Simulink仿真平台上搭建了各个姿态通道的仿真模型并进行仿真实验和结果分析。为了验证SC-PID对不同数学模型的被控对象的控制效果,设计了相应的非线性系统模型进行仿真实验分析。本文采用的SC-PID控制器可以很好地满足四旋翼飞行器对于姿态角控制和非线性系统控制的需求,而且有很好的稳定性。另外,对比于传统PID算法,SC-PID控制算法需要设计的控制参数少,也能够很好地降低超调量和稳定误差,进一步保障四旋翼飞行器飞行过程中的稳定性。
