基于卡尔曼滤波算法的ADS-B航迹预测
2021-11-03卢献宇张媛媛
卢献宇 张媛媛

DOI:10.19850/j.cnki.2096-4706.2021.08.014
摘 要:廣播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)系统作为民航独立的监视手段具有一定的脆弱性。现提出基于卡尔曼滤波算法进行ADS-B航迹预测的方案,为进一步鉴别ADS-B位置信息的真伪提供可靠的技术支撑。通过解析ADS-B报文中的位置信息,建立卡尔曼滤波模型,计算航迹预测观测点数,完成基本的航迹预测实验。理论分析和仿真实验结果表明基于卡尔曼滤波算法的ADS-B航迹预测效果很好。
关键词:ADS-B;航迹预测;卡尔曼滤波;蒙特卡洛方法
中图分类号:TP391.9 文献标识码:A 文章编号:2096-4706(2021)08-0048-04
ADS-B Track Prediction Based on Kalman Filtering Algorithm
LU Xianyu1,ZHANG Yuanyuan2
(1.Guangzhou Civil Aviation College,Guangzhou 510403,China;
2.CAAC Xinjiang Air Traffic Administration,Urumqi 830015,China)
Abstract:Automatic Dependent Surveillance-Broadcast(ADS-B)system has a certain vulnerability as an independent surveillance means of civil aviation. In this paper,a scheme of ADS-B track prediction based on the Kalman filtering algorithm is proposed,which provides reliable technical support for further identifying the authenticity of ADS-B position information. Through analyzing the position information in the ADS-B message,the Kalman filtering model is established,the observation points of track prediction are calculated,and the basic track prediction experiments are completed. Theoretical analysis and simulation experiment results show that the ADS-B track prediction based on Kalman filtering algorithm has good effect.
Keywords:ADS-B;track prediction;Kalman filtering;Monte Carlo method
0 引 言
卡尔曼滤波算法是一种最小化均方误差的线性滤波方法,它在观测方程和目标状态转移方程的基础上,使用迭代的方式对目标的状态进行预测和更新。正是它的递推型结构,有利于实现数据的实时处理,因此,作为一种最优估计理论广泛应用于航迹滤波中。
飞行器机载ADS-B系统通过1090ES数据链广播其位置、速度等信号,该信号由地面站天线接收后可生成CAT021格式的报文信息,提供给空管部门等用户。由于ADS-B报文是一种开放的数据格式(CAT021格式),其各项数据均通过无线链路以非加密方式进行广播,任何用户均可从报文中获取该目标位置信息,研究人员亦可获取目标位置信息[1],因此,ADS-B报文信息易受黑客侵入而产生虚假信息,面临着安全性挑战。
针对此问题,可从卡尔曼滤波跟踪目标轨迹的角度切入,讨论并对使用卡尔曼滤波算法进行的ADS-B航迹预测进行仿真分析,为下一步辨别ADS-B信息的真伪提供可靠的理论和实验依据。
基于此,本文从ADS-B报文信息中提取位置等信息,运用卡尔曼滤波算法对该目标进行航迹预测,并运用蒙特卡罗方法分析预测结果。
1 相关理论
1.1 ADS-B报文解析
ADS-B消息内容共112比特,如图1所示,分别由下行链路格式、应答能力、飞机地址、奇偶校验以及56 bit的ADS-B数据(ME)组成1 090 MHz的ADS-B消息体。
在承载着ADS-B数据的ME字段中,前5个比特为(TYPE)消息类型字段,紧接着的3个比特为消息子类型(SUBTYPE)字段,剩余48个比特为消息内容——主要包括空中或地表目标位置的经纬度、高度、空中速度消息、时间指示信息等。因此,本文从ME获取航空器(目标)位置信息,作为航迹预测的测量航迹(观测数据)。
1.2 卡尔曼滤波模型
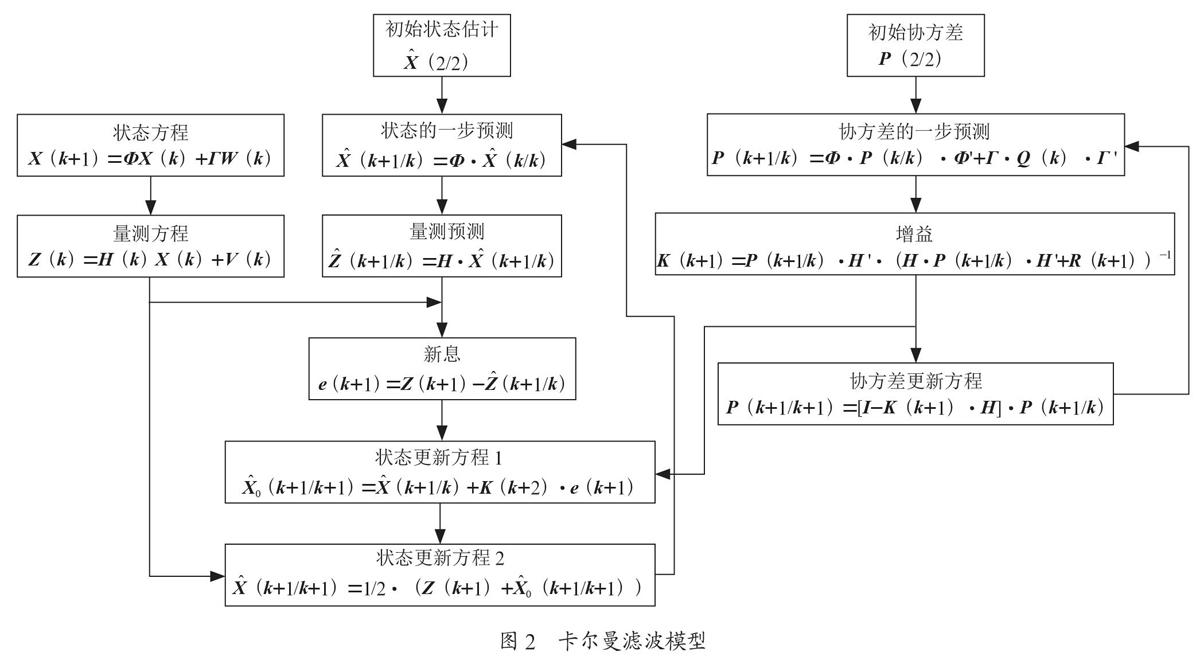
利用卡尔曼滤波算法对某一目标进行跟踪预测航迹,首先要给定滤波器的初始值,并通过量测数据对算法进行不断的更新,以达到对目标跟踪的目的,因此,卡尔曼滤波器的初始化是该算法的必备条件;卡尔曼滤波过程中的信号和噪声由状态方程和量测方程表示,利用前一时刻的估计值和现在时刻的观测值来更新对状态变量的估计,求现在时刻的估计值[2]。据此,分析出卡尔曼滤波模型如图2所示。
2 航迹预测观测点数的确定
卡尔曼滤波的运用,需明确历史观测时刻的点数M。M的取值越小,越能体现目标最新的运动规律,但M值太小,模型估计受量测噪声的影响越大;M的取值大,可减小随机误差,但会导致在预测目标航迹时产生滞后误差,需权衡利弊。使用文献[3]提出的“数据驱动”建模方法[3],解决M的选择问题。具体步骤为:
第三步:通过“增加M值—拟合”的更迭运算,判断拟合误差是否超门限,若否,则M=M+1,继续更迭云端,计算拟合误差,直到超门限,计算终止,最后添加的一个量测数据被移除,即M=M-1,得到M值。
上述确定M的方法,无须考虑被跟踪目标的类型,仅依赖于系统量测误差信息,对目标的机动反应较为迅速,是获取航迹预测观测点数的较好方法。
3 仿真实验与分析
3.1 航迹预测仿真
通过以上分析,建立基本的航迹预测流程:
(1)根据第2小节的拟合推算,确定本仿真实验使用的历史航迹数据点数(M,即观测数据序列长度/序列元素个数)为9。
(2)利用ADS-B的ME字段解析出目标的位置(经度、维度、高度三维航迹,XYH坐标)。根据标准文件[4],ADS-B空中位置信息的发射频率约每秒钟2条,每条解析出一个航迹点位置信息,成为卡尔曼滤波观测序列的元素。假设飞机处于巡航状态,速度为220 m/s左右,在确定元素个数为9的情况下,得出在观测序列内,飞机的飞行时间大约为4.5 s,飞行里程大约为1 000 m,可认为其在匀速运动,且航行高度几乎不变(或高度在小范围内变化)。
此过程对滤波器进行了初始化,使用了前2个观测数据,从第3个数据开始滤波,通过得到的最新量测数据不断地对滤波算法进行递推,不断更新目标的状态信息,实现对航迹的预测。
由图3可见,9个测量航迹数据显示的目标高度在3 330 m至3 400 m之间,目标在观测过程中飞行高度几乎不变,而通过滤波生成的7个估计航迹位置与目标测量位置是基本吻合的,滤波效果良好。
3.2 仿真结果分析
为进一步真实地反映航迹预测的滤波效果,现采用蒙特卡洛(Monte-Carlo)方法[5]进行分析。蒙特卡洛方法又称为统计模拟法、随机抽样技术,是一种随机模拟方法,是以概率和统计理论方法为基础的一种计算方法,是使用随机数(或伪随机数)来解决很多计算问题的方法。将所求解的问题与一定的概率模型相关联,用电子计算机实现统计模拟或抽样,以求得问题的近似解。为象征性地表明这一方法的概率统计特征,故借用赌城蒙特卡洛来命名。
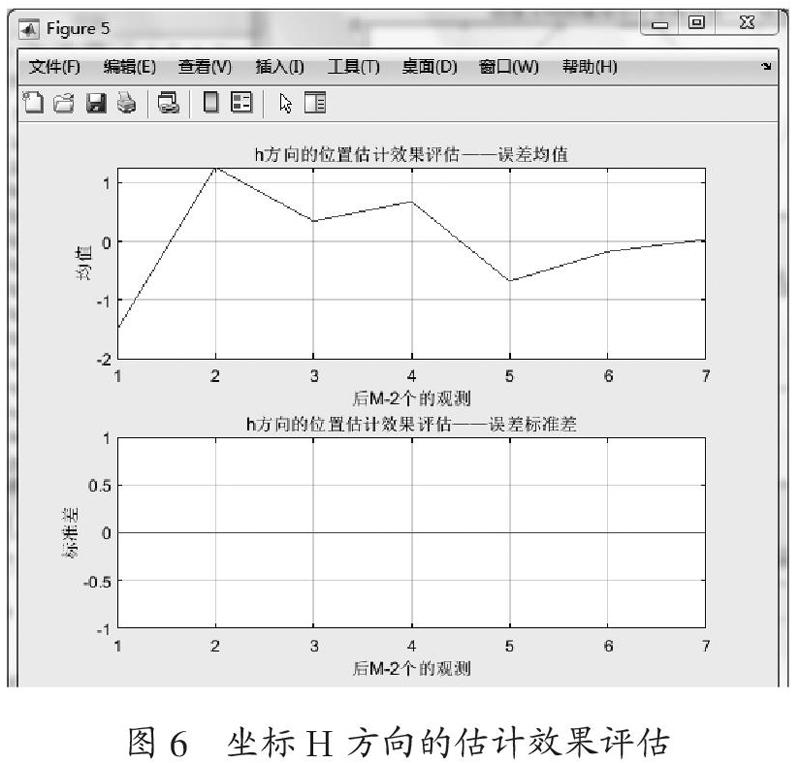
使用式(2)估计的误差均值及式(3)误差标准值进行蒙特卡洛实验:
得到的结果如图4、图5、图6所示。
由图4、图5、图6可知,随着卡尔曼滤波的推进,在X、Y、H方向对航迹估计的蒙特卡洛实验取平均误差均值的趋势是减小的,且最后是收敛的,接近于0;误差标准值为0,进一步说明了卡尔曼滤波的航迹估计效果很好。
4 结 论
卡尔曼滤波作为一种所需数据少、计算相对简单的算法,在现行的目标跟踪/航迹预测算法中起着重要作用,它是根据估计规律对测量值进行修正且迭代估计的算法。因此,估计函数是否准确关系着最终航迹的跟踪精度。本文仅从单一目标跟踪及线性的卡尔曼滤波进行仿真与分析,效果较好,后续仍可进一步研究——由于其他飞行动态的非线性及同一空域非单一ADS-B目标的情况,可进行多目标跟踪及非线性的卡尔曼滤波(EKF/UKF/利用BP神经网络进行学习的自适应卡尔曼滤波等)方向的研究,更进一步地切合实际应用。
ADS-B技术已在我国民航领域得到广泛应用,但它作为民航独立的监视手段仍有很长的一段路要走。文中的仿真结果显示,利用卡尔曼滤波进行航迹预测效果很好,该成果可作为虚假飞行目标是否改变计划航线的判断依据,为以后研究ADS-B位置信息真伪辨别打下坚实基础。
參考文献:
[1] STROHMEIER M,SCH?FER M,LENDERS V,et al. Realities and challenges of nextgen air traffic management:The case of ADS-B [J].IEEE Communications Magazine,2014,52(5):111-118.
[2] 刘瑞腾.目标跟踪滤波方法研究 [D].西安:西安电子科技大学,2018.
[3] 李宏博.高频雷达目标数据处理技术研究 [D].哈尔滨:哈尔滨工业大学,2009.
[4] RTCA. Minimum Operational Performance Standards For 1090 Mhz Extended Squatter Automatic Dependent Surveillance-Broadcast(Ads-B) And Traffic Information Services-Broadcast(Tis-B):RTCA DO-260B-2009(R2011) [S].Washington DC:RTCA,Inc.,2011.
[5] 邓世容,石跃勇.蒙特卡洛方法在概率论与数理统计教学中的应用 [J].科教导刊(上旬刊),2018(1):111-112.
作者简介:卢献宇(1988—),女,汉族,广西玉林人,中级职称,硕士研究生,研究方向:信号处理、导航、监视。
收稿日期:2021-03-12
