数控机床加工精度误差预测研究
2021-11-02王文涛彭才华
柳 博,王文涛,彭才华
(兰州现代职业学院理工分院,甘肃 兰州 730000)
目前由于五轴数控机床在加工技术上的优越性能使其备受公众关注,其无论在零部件的加工质量、生产效率等方面均远远高于三轴数控机床。但是在机械零部件的加工精度上较难控制[1]。本文基于此,对当下有关五轴数控机床提高精度的热点问题进行研究,在其相比于三轴数控机床的各项优点上,采用定量等精度分析手段对五轴机床进行相应测试研究,以此显著延长五轴数控机床的精度寿命提供一定的技术参考。
1 五轴机床的运动误差
本次主要对五轴数控机床的运动误差进行研究,其结构图详见图1。首先需要对五轴数控机床的误差进行逐个检索剖析,其主要包括有两根在X、Z方向上的旋转轴线以及三根在X、Y、Z方向上的直线轴线[2]。国内部分专家对该数控机床的运动误差做出了一定探讨,研究表明该数控机床的旋转轴误差与直线轴误差共计11种之多(其中包括3个直线轴运动误差与8个旋转轴运动误差),这其中αay、βay、ray分别表示为A轴相对于X轴、Y轴、Z轴的旋转角度误差,而rxy、αyz、βzx分别为X轴、Y轴、Z轴的垂直角度误差,详见图2所示。而且因为垂直角度误差的测量与三轴数控机床的误差测量方法大致相同,而且相比旋转角度的运动误差而言可以忽略不计,因此本文主要对上述八种旋转角度误差进行探讨。
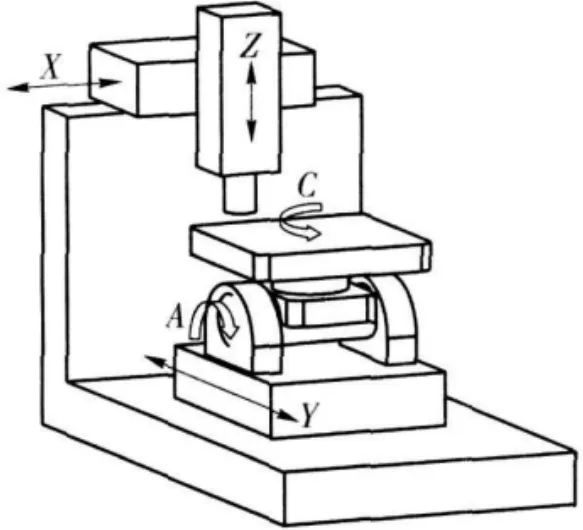
图1 五轴数控机床结构简图
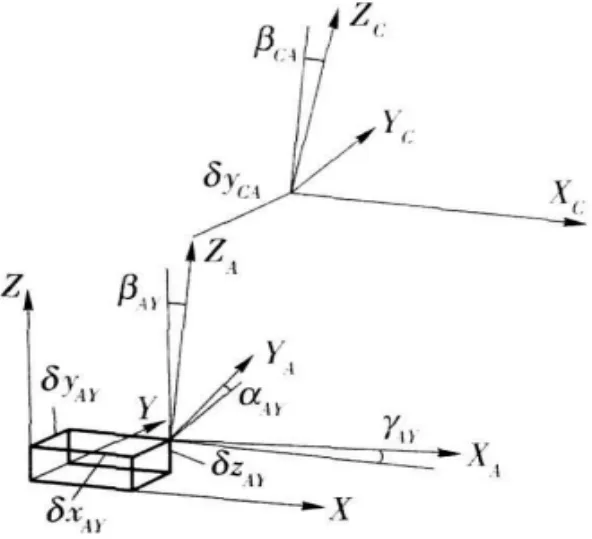
图2 双轴转台的运动误差
2 运动误差模型的建立
本模型主要采用变换矩阵数值分析法对五轴数控机床进行运行误差建模分析,根据机床所对应的误差与运动链可以得到机床的球杆仪球心的矩阵方程式:
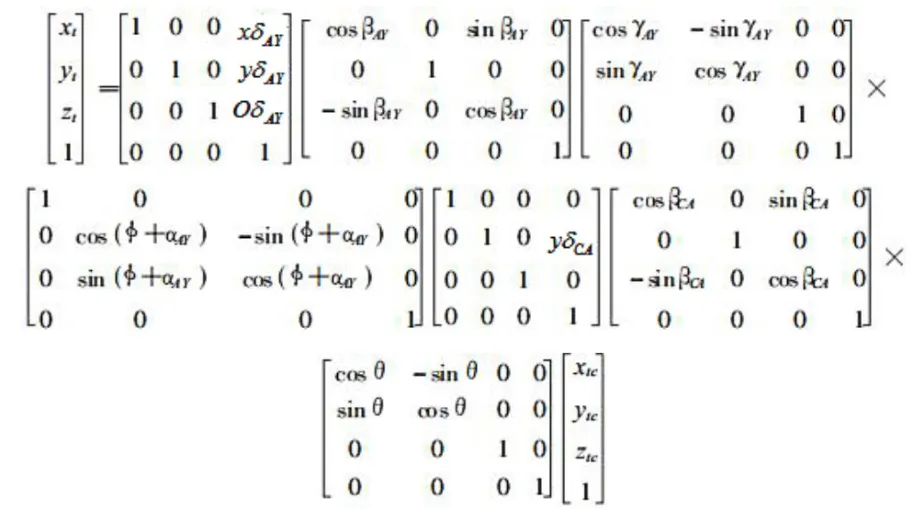
由式中可见,Xtc、Ytc、Ztc为五轴数控机床中球杆仪球心的初始坐标测量值。但是由于其旋转角度运动误差均为微小量值,因此该齐次逆转矩阵可以简化如下:

基于本文所研究的五轴数控机床为双旋转工作机制,因此在该数控机床工作中可以采用多轴同步来进行加工任务操作,但是若同步的轴数过多将不利于对旋转角度误差的运动分解[3]。因此本文考虑较为便捷的运动设计方案,即使得C轴充分固定,让A轴进行旋转运动,而且也应该考虑到两个球杆仪间的运动轨迹分别呈现切线方向、径直方向、轴面方向三种轨迹状态,从而产生了A轴旋转球杆仪径向、A轴旋转球杆仪轴向、A轴旋转球杆仪切向、C轴旋转球杆仪径向、C轴旋转球杆仪轴向、C轴旋转球杆仪切向六种轨迹姿态运动组合,因此可以得出球杆仪球心位置的向量矩阵(C轴固定,A轴旋转):

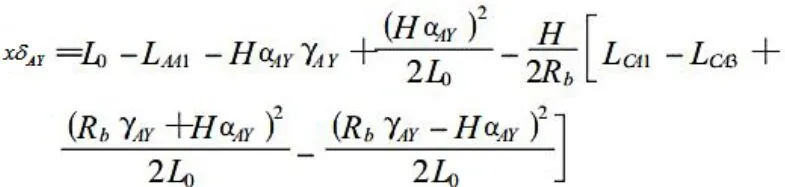
依据建模计算得出:球杆仪两端距离在特定位置的距离计算公式,且综合所测球杆仪在特定的位置时的长度数值,可组合方程组,对方程组求解后即可得出误差数值。
3 运动误差分离
通过上述的误差矩阵模型可知,其尽管可以通过齐次逆转矩阵得出相应的矩阵方程式,但并不能得出精确的方程解,因此可以根据上述方程式的最优解推导出相应的精确方程解,但想求得最优解,就必须计算出旋转角度误差值,进而求解长度误差[4]。通过上述的轨迹姿态运动组合进行相应操作,进而编写相关程序使得五轴数控机床按照既定程序进行运动轨迹模拟,并且注意读取工作台中的球杆仪的各项长度测量值,实际的观测值见表1。

表1 数控机床工作台中的读取长度值
五轴数控机床的旋转角度运动误差可以通过以下步骤解出:
当C轴固定但A轴旋转时,工作台上的双球仪在A轴旋转到90°时的读数为LAA2,根据方程组LAA2=L-HβCAHrAY并代入βCA=L-LAA2-HrAY/H。当C轴固定但A轴旋转时,工作台上的双球仪在A轴旋转到0°时的读数为LAA1,根据方程组LAA2=L-HβCA-HβAY并代入βCA=LLAA1HβAY/H。进一步由表1可知,当C轴固定时,球杆仪在旋转轴A转到0°和90°时的读数分别为LCA1、LCA2,因此可以通过上述方程式中得出的机床工作台各项误差实际观察值得到下列方程:
4 仿真
本次仿真主要应用Matlab软件根据模型的向量矩阵进行误差仿真模拟研究,首先精确的计算出五轴数控机床工作台上的球杆仪在六种轨迹姿态上所处的实际长度值,并将其数值代入到上述的误差分解步骤之中,进而求得误差模型的识别误差值。在本文的误差仿真模拟过程中,设计该机床的球杆仪理想长度为120mm,A轴与C轴到机床工作台球杆仪球心的理想距离分别为220mm、120mm,进而依据旋转角度误差的齐次矩阵模型得出相应的误差值。通过表2可以看出,此误差源的识别算法的可靠程度很高,其绝对误差均在合理范围以内,因此应用此算法可以很好地用于机床的误差补偿。

表2 各个运动误差的给定与识别值
5 结论
本次基于对五轴数控机床的误差模拟研究,提出了有关机床的复杂旋转角度的运动误差计算方法,通过Matlab软件进行了误差模拟仿真研究,使得对该类数控机床的运动模拟误差控制大大简化,也为其提供了相对可靠的误差模型基础,对对五轴数控机床零部件加工的位置误差与姿态误差补偿具有重要意义。
