集成成像3D拍摄与显示方法探析
2021-11-02李瑞鹤
李瑞鹤
(西安电子科技大学,陕西 西安 710000)
0 引言
1908年,G·Lippmann首次提出集成成像技术,自此,该技术因全视差、连续视点、无视疲劳等多重优势而广受关注。集成成像又被称为“真3D显示”,其借助微透镜阵列记录3D场景,并借助同参数微透镜阵列将图像重现,因而重现的图像与原场景色彩一致、深度相同。常规集成成像仍存在分辨率低、视场角窄、深度范围不佳等问题,这些缺陷成为限制该技术产业化、规模化的主要阻碍。因此,有必要深度研究集成成像3D拍摄与显示方法,探索持续优化集成成像的显示方案,以促进其在各领域的深度应用。
1 集成成像3D拍摄技术
为了适应不同应用场合,3D拍摄方法也有所差别,或利用单相机记录物体平面图像,再利用光、声等飞行时间获取物体深度信息;或利用双目视差原理,以立体摄像系统进行拍摄,获取具有视差的双眼视图,如同感IMAX系统实现3D电影的拍摄;或利用光波振幅、相位信息的记录获取3D图像数据,以实现全息现实;或利用微透镜阵列拍摄空间物体,直接获取3D图像,此即集成成像3D拍摄技术。集成成像3D拍摄方法很多,下文重点就较为典型的两种方法进行阐述。
1.1 直接3D拍摄
1997年,日本F·Okano等首次以直接拍摄获得了实时集成成像3D图像,3D场景所发射的光纤利用微透镜阵列的各透镜元进行折射,再利用摄像机直接摄制下来,形成微图像阵列,各图像元经中心旋转180°后被送至集成成像显示器,经二维显示器与针孔阵列解决深度反转问题。值得注意的是,该方法所重构的三维图像为虚像,其凹进显示屏中,因而显示效果不甚理想。随后,M·Martinez-Corral等学者在微透镜阵列、摄像机之间设置了一个成像物镜,如此一来,物镜所带来的深度反转与集成成像本身的深度反转相结合,最终得到了深度正确的3D图像,有效简化了传统拍摄方法深度反转的繁冗步骤,同时获取了实虚两种3D图像。为了进一步优化直接3D拍摄法相机镜头所引发的图像畸变问题,J·Arai等学者将渐变折射率微透镜阵列与图像传感器相贴近,然而,该过程需要附加渐变折射率微透镜阵列等器件,既繁琐又难免引入图像畸变问题。因此,J·Kim等引入了计算机处理系统,通过对中心深度平面位置进行控制,有效提升了3D图像的质量[1]。
1.2 摄像机阵列3D拍摄
该法是以摄像机来取代组成微透镜阵列的各透镜元,由此构成一个等间距排列的摄像机阵列,由于透镜元、摄像机成像均存在上下、左右翻转性,因此,利用摄像机阵列所获得的微图像阵列相当于传统微透镜阵列图像元180°旋转后的结果,因而解决了传统拍摄方法深度反转的问题,加上各摄像机仅需获取一个图像元,因而极大地提升了图像分辨率。然而,该方法也有缺陷,即所需摄像机量大,加上摄像机间的配置、修正等复杂操作,因而在大场景集成成像拍摄中并不适用。为了解决摄像机数量问题,有学者采用稀疏摄像机阵列法进行大场景3D拍摄,获取场景各角度立体信息,最终得到视差图像阵列,并通过构建的像素影射模型将其转换为微图像阵列,继而实现3D拍摄[2]。
2 高分辨率集成成像3D显示方法
集成成像3D显示方法很多,下文重点就现阶段研究热点高分辨率集成成像3D显示方法进行探讨。集成成像3D显示的性能参数是评价显示效果的基本指标,主要包括观看分辨率、观看视角、深度范围3种,其中,观看分辨率是3D显示最关键的性能指标,该参数直接关系着观者的感受。该指标影响因素众多,如显示屏分辨率、微透镜阵列焦距、中心深度平面与微透镜阵列之间的距离、元透镜口径等,在实虚像模式下,中心深度平面的成像分辨率直接决定了观看分辨率。通常而言,集成成像借二维显示器的有限像素对光线、方向两大类要素信息进行同步显示,难免会导致空间分辨率下降,这是制约分辨率提升的最主要原因。较为典型地提升集成成像分辨率的方法是利用时分/空分复用法加以实现,包括增加采样率、提高显示屏像素密度两种方法[3]。
2.1 增加采样率
从某种角度来看,集成成像观看过程犹如采样,受采样定理的限制,人眼从各单元透镜采样一个或多个像素拼接成所看到的3D图像,因而单元透镜数、节距等直接影响采样率乃至观看分辨率。为了克服采样定理的局限性,J·S·Jang等学者引入移动微透镜阵列技术,使拍摄、显示的微透镜阵列在双目视觉暂留时间内迅速同步振动,并从不同位置对3D场景拍摄多组单元像阵列,显示用的微透镜阵列亦同步振动,在差异位置重构不同方向的光线,最终达到增加采样率与观看分辨率之效。然而,该法对机械振动要求极高,并不具备很强的实用性;随后,Y·Kim提出移动针孔阵列法,其借助液晶面板生成自动控制的针孔阵列,并利用显示画面的改变实现针孔阵列的移动,配合对应的单元像阵列即可重构两个3D图像,这两个图像所包含的像素在空间分布位置上互为补充,因而一旦两个模式在肉眼反映范围内迅速切换,即可观看到具有高分辨率的3D图像。
2.2 提高显示屏像素密度
显示屏像素量直接反映了集成成像显示系统所能呈现的信息量,因此,提升像素密度可达到高分辨率显示之效。通常而言,可利用多台投影仪空分复用地投影高像素数量的图像,或以单台投影仪时分复用地扫描投影多幅图像,而这对扫描速度提出了较高的要求,即其必须高于肉眼的闪烁融合频率。这两种方法虽可提升像素密度,但也会导致系统复杂性大增。因此,也有学者提出以差异化焦距透镜阵列分别进行显示,配合单元像有效区域的扩大,以提升视觉分辨率,其原理如图1所示,其中,图1(a)为传统集成成像单元像有效区域,图1(b)为扩大单元像有效区域方法的原理图,通过将EIA1单元像有效区域进行裁剪,作为新单元像显示于EIA2中,即可使显示区域面积大幅增加,使有效区域占用率提升至100%,极大地提升图像分辨率[4]。
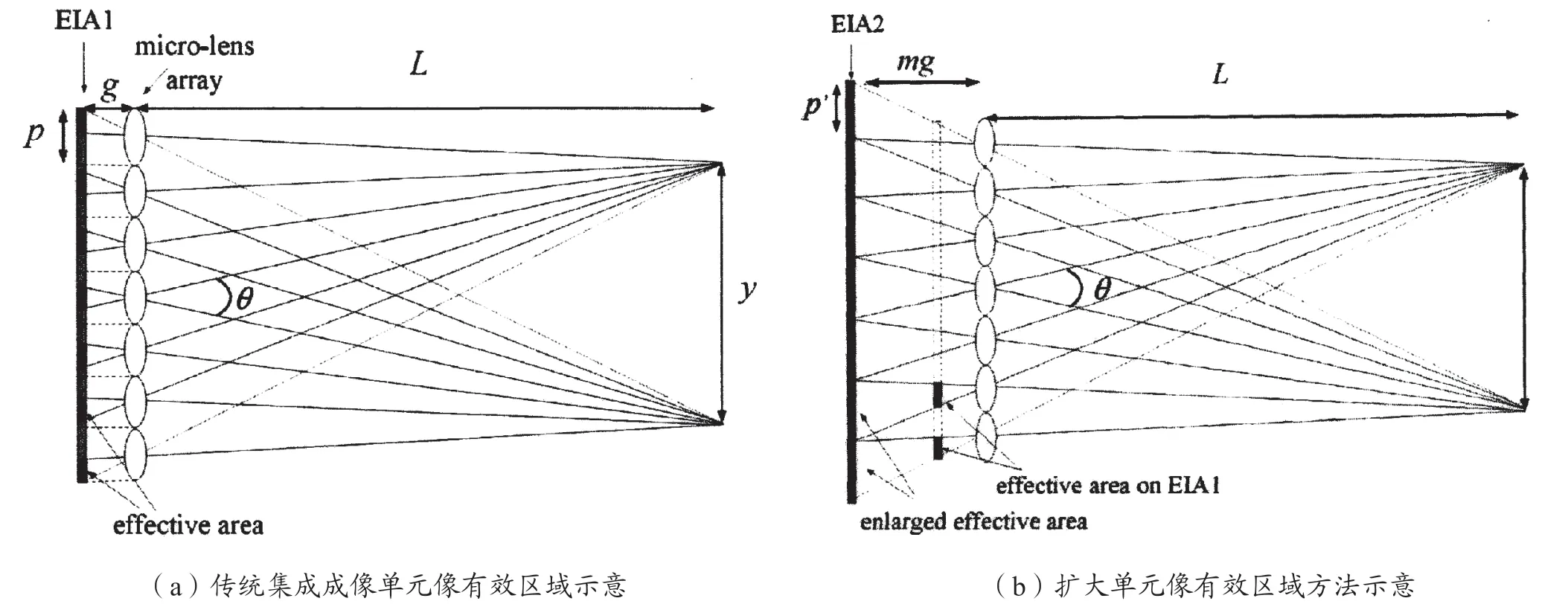
图1 原理
3 结语
集成成像3D显示技术被视为3D显示技术最具前景的发展趋向,加上计算机、微透镜阵列制备工艺、记录及显示设备等的高速发展与逐步完善,集成成像3D拍摄与显示技术将在3D电视、印刷、深度测量、军事、医学、建筑等各项领域加速渗透,并将持续深入地改变人们的生活。然而,受原理、器件等因素的局限,集成成像3D拍摄与显示技术的分辨率、视场角、深度范围仍不甚理想,因此,还需进一步深化研究,探索头部跟踪技术、导光板、角锥回射器阵列、虚拟现实及增强现实等技术的引入,以寻求更优越的集成成像显示方案。
