软体弯曲驱动器设计与建模分析
2021-10-23齐开乐
齐 开 乐
(安徽工业大学 机械工程学院,安徽 马鞍山 243002)
目前,机器人研究的热点和发展前沿为软体机器人。与传统机器人不同,软体机器人能够与人类和动态环境安全交互。由于其独特的功能和优势,软体机器人被广泛应用于太空探索、复杂地形勘探、仿生学、医疗辅助等领域。近年来,关于软体机器人的研究越来越多,比如:章鱼触手[1-2]、毛虫[3-4]、水母[5]、海星[6]、象鼻[7-8]等。
软体机器人由可拉伸的柔性材料(例如硅橡胶)组成,驱动器是其设计的重点。软体驱动器在力的作用下可以实现屈伸、扭曲等变形,需要对软体驱动器的变形机理进行研究。不同的驱动方式,其驱动器在结构与性能上所表现出来的差异是十分明显的。目前,软体驱动器驱动方式主要分为流体驱动、物理驱动、EAP(电活性聚合材料)驱动和化学驱动4种类型。本文设计了一种采用气压驱动的新型软体驱动器,采用理论、仿真和实验3种方法分析压力作用下软体驱动器的弯曲变形。
1 软体驱动器的结构设计
软体弯曲驱动器由多个腔体均匀排列组成,通过气管对腔体进行充气,各腔室体成鼓包状,实现软体驱动器的单向弯曲。软体驱动器的结构如图1所示,其结构参数如表1所示。

图1 软体驱动器的结构设计图

表1 软体驱动器的设计参数
软体驱动器通过不同气压作用实现不同程度的弯曲变形。软体驱动器整体由腔体网络结构和限制层两部分构成。在设计多腔室网络的双层结构时,参考了Bobakd等[9]设计的气动网络结构。
2 软体驱动器建模
软体驱动器缺乏刚性结构,不能直接用刚体力学进行计算和分析。为了研究软体驱动器的弯曲运动特点,需建立气压值随弯曲角度变化的理论分析模型和仿真分析模型。
2.1 理论模型的建立
软体驱动器使用硅橡胶Ecoflex00-30材料制作而成。硅橡胶材料是超弹性材料,其力学特性具有非线性,常用应变能密度函数来描述硅橡胶材料的力学性能,可表示为:
W=W(I1,I2,I3)
(1)
(2)
式中:λ1、λ2和λ3分别为轴向、径向和周向主拉伸比;Ci为材料参数;I1、I2和I3分别为Cauchy-Green应变张量的3个不变量,对于不可压缩的超弹性材料,I3=1。
目前,应变能密度函数主要采用Neo-Hookean、Mooney-Rivlin、Yeoh等模型[10-11]。Yeoh模型模拟硅橡胶材料应力与应变之间的关系时,假设如下:① 硅橡胶材料是不可压缩的,软体驱动器初始长度为l0,变形后长度为l,在内部压力P的作用下产生弯曲变形,但驱动器底面长度在弯曲变形过程中未发生变化,仍为l0;② 忽略重力作用的影响,驱动器在气压作用下始终保持恒定曲率弯曲。基于假设的软体驱动器弯曲变形状态如图2所示,R和θ分别为内部气压作用下软体驱动器的曲率半径和圆心角。
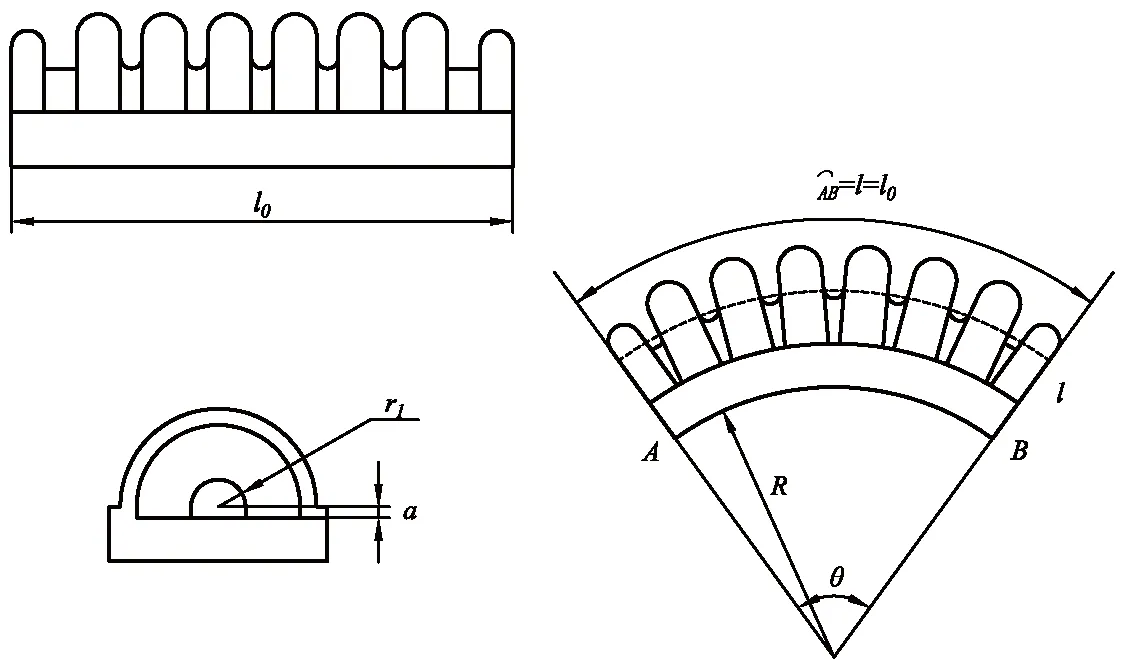
图2 软体驱动器的弯曲状态图
经过弯曲变形后,软体驱动器在径向方向上的变形与轴向和周向方向上的变形相比,更为明显。基于建模假设可得λ2=λ3。结合式(2)可得:
(3)
根据弧长与半径的关系,可得
(4)
式中:r1为驱动器腔室通道半径;a+t为驱动器空腔基底厚度。
对于Yeoh模型,应力公式[12]
(5)

软体驱动器的内应力
(6)
其中:对于Ecoflex 00-30来说,Yeoh能量密度模型系数[10]C1=0.11、C2=0.02。
随着径向长度的变化,轴向横截面积相应地发生改变。改变后的横截面积S与原来横截面积S0可通过公式S=S0λ2λ3计算。由软体驱动器的截面形状建立力的平衡方程
σS=PS0
(7)
结合式(3)、式(4)和式(6),可得弯曲角度θ与内部压P之间的函数关系:
P=P(θ)
(8)
式(8)表示软体驱动器不同弯曲程度变形所需要的气压值。
2.2 有限元仿真分析
为了验证所设计软体驱动器结构的合理性,对其模型进行弯曲变形分析。在计算机辅助设计软件Solidworks中构建软体驱动器模型,加载到Abaqus软件中进行弯曲变形分析。设置Yeoh模型为软体驱动器的本构模型,边界条件设置进气端为完全固定,负载设置气压值为80 kPa。通过仿真分析可知,软体驱动器的弯曲角度可达到74°,驱动器变形结果如图3所示。

图3 P=80 kPa时驱动器弯曲状态
3 实验验证
3.1 软体驱动器的制作
为了更好地了解驱动器的弯曲特性,制作驱动器实体进行实验研究。AB硅胶黏性强、凝固时间短,通过一次性填充模具的浇注方式,减少了硅胶液完全填充模具空腔的时间。对于软体驱动器内部空腔,将软体驱动器分为本体和限制层两部分进行制作。制作过程如下:① 混合AB液并将其倒入模具中,主体模具完全填充,底层模具不完全填充,留少量部分;② 将主体脱模,然后用未固化的AB混合液倒入底层模具的剩余部分;③ 一起固化主体和底层;④ 拔出最终的驱动器。软体驱动器模具采用Solidworks三维建模,3D打印制作,如图4所示。打印材料采用未来8 000树脂。软体驱动器实物如图5所示。
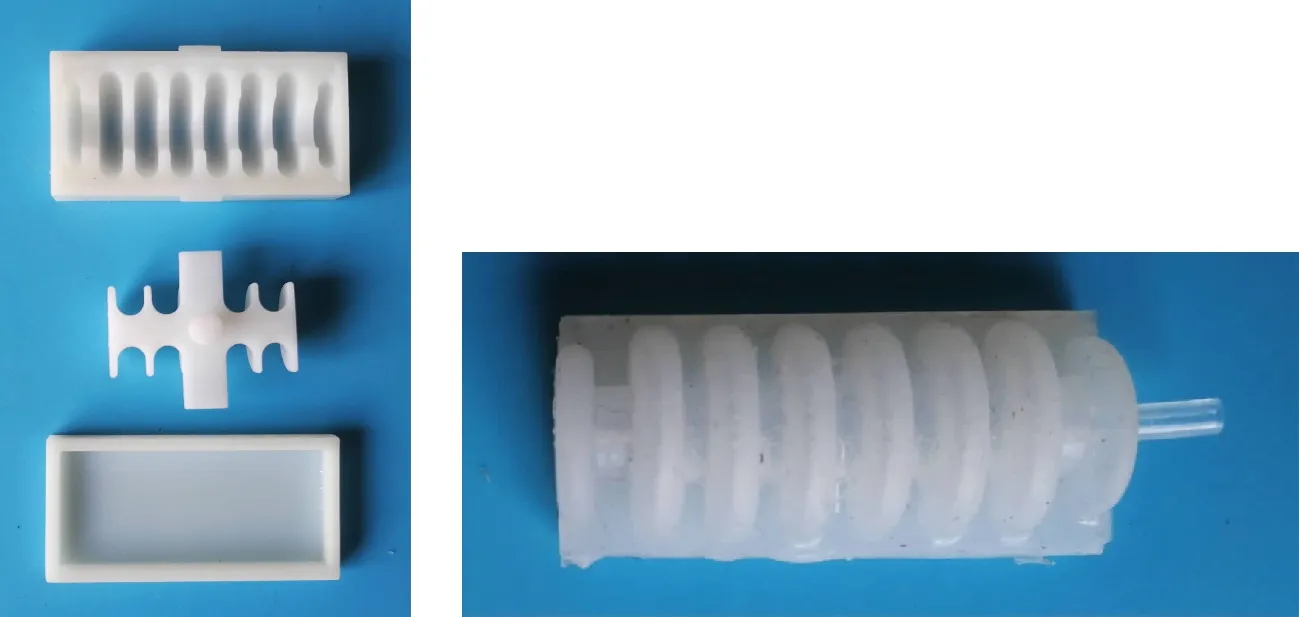
图4 模具实物 图5 软体驱动器实物
3.2 实验平台的搭建
为了研究软体驱动器内部气压与弯曲角度之间的关系,搭建实验平台如图6所示。软体驱动器使用闭环控制方式精确控制,控制方案如图7所示。上位机发出控制指令给Arduino控制板;Arduino控制板在接收到控制指令后通过引脚改变脉宽调制(PWM)的占空比,调节气泵的输出气压、流量;气体通过软管从气泵经过电磁阀输送至软体驱动器;气压传感器将数值实时反馈给Arduino控制板。当软体驱动器内部气压达到设定值时,通过程序控制Arduino控制板上引脚与继电器IN信号的连接来控制继电器的停止。当继电器连接断开时,电磁阀关闭,断开对软体驱动器的充气,实现对软体驱动器的保持。气压传感器与弯曲传感器可以通过上位机通信串口读取气压值与弯曲角度的实时数据并保存为Excel文件。

图6 实验平台系统

图7 控制系统流程图
3.3 实验数据分析
软体驱动器弯曲角度-气压关系曲线如图8所示。由图8可知,实验数据与理论模型计算之间存在着一定的误差。误差产生的原因包括:① 气压传感器和弯曲传感器受到噪声的干扰,影响了数据的采集;② 软体驱动器的弯曲变形并非严格符合恒定曲率;③ 软体驱动器制作过程中,残留了少量小气泡,使材料的内部结构分布不均匀,进而导致应力分布不均。总的来说,内部气压在0~100 kPa范围内,软体驱动器的理论数值绘制的曲线与实际测得的弯曲角度-气压曲线呈现线性变化的基本趋势相同,表明力学模型的构建基本合理。实验结果表明,当软体驱动器的内部气压达到90 kPa时,其弯曲角度为80°。
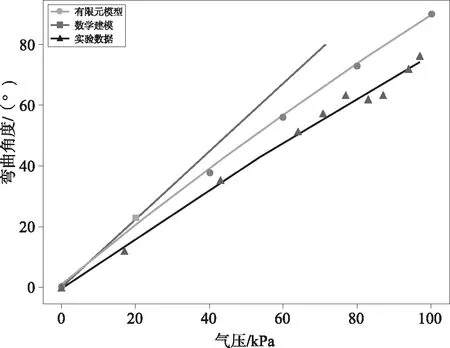
图8 软体驱动器弯曲角度-气压曲线
4 结 语
利用硅橡胶Ecoflex 00-30材料的应变能密度函数,结合Yeoh模型的能量密度模型系数,建立了软体驱动器的计算模型,得到弯曲角度θ与内部压强P之间的函数关系。借助Abaqus CAE软件进行仿真分析,证明了所建立理论模型的合理性。通过制作驱动器实体和搭建实验控制平台,验证了软体驱动器弯曲角度θ与内部气压P之间的联系,验证了软体驱动器结构设计的合理性。
