无人机摄影测量在工程中的应用
2021-10-20李锦通陈思远
李锦通,焦 龙,陈思远
(中建四局第六建设有限公司 合肥 230011)
0 前言
我国科技飞速发展进程中,无人机摄影测量被应用在各个领域,与普通的测量技术相比具有明显优势,可为各类工程提供极大便利。随着无人机搭载的摄像头性能的不断提高,在进行工程测绘工作中也相应地提高了数据参数精度。
1 无人机摄影测量
1.1 无人机摄影测量
无人机摄影测量是指利用多旋翼或固定翼的无人飞行器平台,搭载单镜头或多镜头的相机传感器,以及小型机载RTK等获取数据的一种先进测绘技术,真实反映了地物的外观、位置、高度等属性,快速采集影像数据,实现三维建模。但在应用过程中存在分辨率不一致、精度不可靠等问题,为满足成果质量、提高测量精度,通过改变传统航空摄影只从垂直角度拍摄地物的方式,利用倾斜摄影在同一平台搭载多台传感器,从垂直、侧视等不同的角度采集影像,再进行校正、空中三角测量增加控制点密集度等处理,可将测量参数精确到亚米级,完全满足工程正常条件下的精度要求[1]。
1.2 工程测量中的无人机系统
无人机系统主要包括:飞行平台、飞行导航与控制系统、地面监控系统、机载相机设备、POS设备、数据传输系统、发射与回收系统、附属设备等。在面积大、跨度长的大型工程中,常用固定翼无人机摄影测量,其优势为飞行距离长、巡航面积大、飞行速度快、飞行高度高;而在中小型工程中,则适用多旋翼无人机摄影测量,其优势为体积小、重量轻,可以垂直起降、悬停、侧飞、倒飞,具有很强的机动性,结构简单控制灵活,成本低,螺旋桨小,安全性好,拆卸方便,且易于维护。内业数据配合Pix4Dmapper 航拍影像处理软件,生成高精度带有地理坐标的二维地图及三维模型[2]。
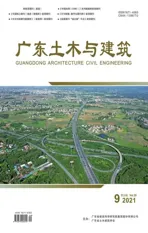
1.3 无人机建模技术流程
无人机建模技术流程如图1所示。
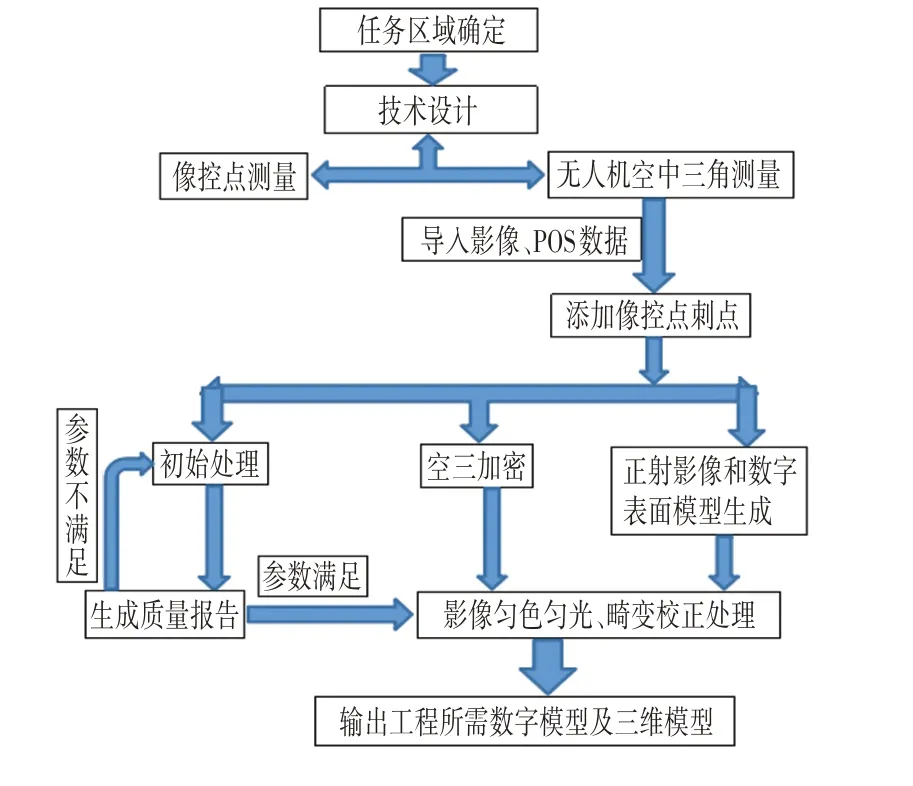
图1 无人机建模技术流程Fig.1 Drone Modeling Technology Flowchart
2 无人机摄影测量三维建模技术
2.1 测绘基准系统与数据格式
⑴基准系统:采用WGS-84 大地坐标系,也可根据工程需要自行设定或转换。
⑵数据格式:摄影照片为JPG 格式,输出模型选择应用软件所需私有格式。
2.2 航摄仪获取照片与质量检查
为保证获取的照片在处理后可应用于工程,需满足航向重叠≥60%,旁向重叠≥30%,正射摄影测量时相机镜头必须保持垂直于云台90°向下,如图2⒜所示。
倾斜摄影测量保持相机的前后倾角小于40°,左右倾角小于35°,如图2⒝所示。
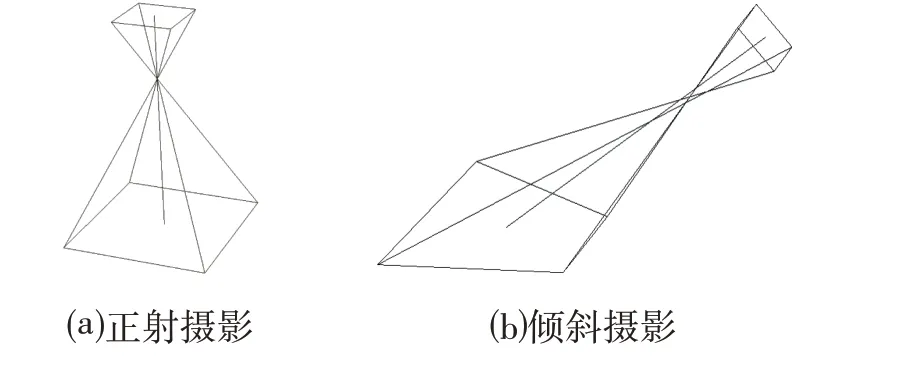
图2 摄影测量Fig.2 Photogramgram Measurements
飞行高度根据工程应用所需要的地面影像分辨率设定,且选择良好的天气进行外业航飞。然后输入Pix4Dmapper 进行数据处理质量检查,用于生产正射影像图、数字表面模型、数字地面模型、瓦片、三维模型、三维点云以及空三加密等[3]。
2.3 无人机影像校正
对外业航摄的所有影像进行校正,主要内容是对影像进行匀色匀光处理、校正畸变差、降噪等[4]。图像校正根据投影几何中直线中心投影变换进行检测,从而进行畸变图像校正,对整张照片进行降噪处理,从而同时降低由于图像畸变与图像噪声对于三维重建精度的影响。
2.4 建模精度与图像分辨率
了解工程分类所需测绘及包含地面影像分辨率的三维重建任务,计算出飞行器的允许摄影高度并依据当地当时的气象及航空管制情况,确定最佳的飞行高度以保障足够的图像分辨率,从而保障工程建模精度。
3 无人机摄影测量三维建模在工程的应用
3.1 工程应用无人机及辅助工具
对无人机摄影测量的研究方法是理论基础与工程实践相结合,所在工程广州南站区域地下空间及市政配套设施工程项目,占地面积20 万m2,最长跨度1.2 km,属于中型工程,应用于研究的是四旋翼无人机大疆御Mavic2专业版,搭载L1D-20c哈苏相机配合高精度云台。地面站软件使用大疆公司开发的DJI GS PRO,对无人机全自动航线规划、相关参数设置、自动拍摄与实时监测。
3.2 航摄仪取景及像控点刺点
由于地下空间工程所处地势无明显高度障碍物,满足地面影像分辨率的同时,选取飞行高度150 m,采用无人机正射摄影测量。工程东西最大跨度1 200 m,南北最大跨度430 m,所用大疆御2 Pro 无人机无屏幕遥控器连接飞行器信号安全范围≤800 m,为满足地面站定点航飞的完成,将起始点放置于以东西方向中部,遥控器有线连接搭载有DJ1 GS PRO 软件的平板电脑,无线连接飞行器,角度可根据工程地形调整,共计航拍影像286张。工程表面由于不同地势地貌的影响,存在凹凸不平的现象,因此利用无人机拍摄所得到的像点位移难以将实际的情況体现出来,对像控点的布设尤为重要[5]。广州南站区域地下空间及市政配套设施工程项目穿插道路较多且交通指示标记明显,像控点均选择为道路指示箭头,使用动态RTK 进行数据采集输出CSV 格式手簿,导入Pix4Dmapper 软件,如图3所示。
图3 导入像控点Fig.3 Imports Like Handles
检查像控点精度,删除覆盖照片极少与坐标误差比较大的像控点(如图3 中点3D GCP6),以确保最终成果精度,然后进行刺点,每个控制点至少要在2张影像中标注。
3.3 图像初步处理
在Pix4Dmapper 中初步处理,对所有影像进行检查并生成质量报告,生成报告检查数据集、相机参数优化质量和像控点精度参数。当质量报告各参数都满足工程要求后,开始高精度处理,进行特征点匹配、优化内外方位角参数等操作。参数设置完毕后,通过软件进行高精度处理[6],生成图像POS 数据位置点,连接各点生成飞行轨迹图。
3.4 空中三角测量增加控制点密集度
空三加密是在无人机完成空中三角测量之后,为增加影像地面控制点的密集程度,获取遥感影像空中摄影瞬间的姿态参数,满足后续成果的生产,减少外业像控点的过程。高精度处理过后,进行空三点云加密处理,处理参数有像素比例、点云过滤器材成果平滑以及输出文件格式[7]。
3.5 数字模型与正射影像图
空三加密处理后进行DOM(正射影像)与DSM(数字表面模型)参数设置,避免生成分块状的DSM与边角区域过多的模糊扭曲。之后生成DSM数据集,利用正射影像编辑器调整拼接线,切换投影面,最终可以在混合影像中生成DOM(正射影像图)与DSM图,完成本次无人机摄影测量对广州南站区域地下空间及市政配套设施工程项目的建模应用,如图4~图5所示。

图4 正射影像Fig.4 Orthographic Image
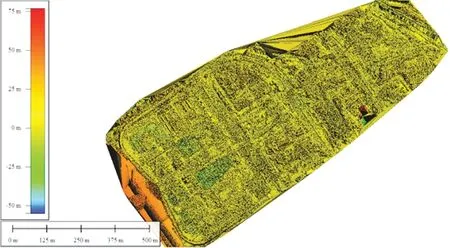
图5 DSM数字表面模型Fig.5 DSM Digital Surface Model
3.6 数据处理成果应用
3.6.1 土石方填挖算量和土方平衡
传统的土方量计算方法观测效率低,地形复杂地区精度差,广州南站区域地下空间及市政配套设施工程项目利用无人机摄影测量采集地面影像数据生成地面实景三维模型,在三维模型上对八号出入口进行特征点采集,可以直观、全面地采集碎部点坐标,利用DTM 法根据坐标文件计算土方量,最终得出出入口共需挖1 361.5 m3,如图6 所示,经验证后也得到了现场监理的肯定,认可此方法提高了工作效率,减小了人工劳动强度。
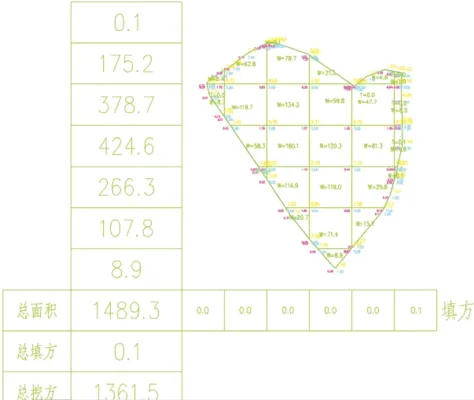
图6 土方量填挖结果Fig.6 The Result of the Earth-for-earth Excavation
工程建设开发期,要将自然地貌平整,此时土方量的大小决定工程投资[8]。使用无人机摄影测量采集施工现场预设钢筋加工区域高程点,平场面积为6 489.2 m2,最大高程8.977 m,最小高程7.354 m,可以得到准确的现场整平高度为7.769 m,如图7 所示,不需要车辆内、外运输土石,减少了工期消耗。
图7 区域土方量整平结果Fig.7 The Result of the Regional Earth Mass Leveling
3.6.2 大比例尺地形图绘制
以数字正射影像(DOM)、数字表面模型(DSM)数据为基础,生成垂直摄影三维模型,如图8 所示,实现二、三维联动显示和立体测图,依次绘制基坑、支撑梁、平台、道路、植被等地物,然后根据项目需要补绘各类建筑物并赋予相应地物编码,最终可以得到包含坐标及高程信息的1∶500大比例尺线划地形图DLG,且精度满足航空摄影测量数字化测图规范[9],如图9所示。

图8 项目三维模型建立Fig.8 Project 3D Model Construction
图9 生成项目大比例尺地形图Fig.9 Create a Large Scale Topographic Map of the Project
3.6.3 复核现场放样坐标及标高
工程施工期,对梁、柱、墙、板面等测量放样后,测量人员需对施工完成的插筋、支模等位置复核坐标与标高,以保证过程质量,是测量人员不可规避的繁重任务。使用无人机航测生成的正射影像图可以在图上选点直接反映出需要复核点的坐标及高程,通过和设计图纸对比进行复核[10],将需要投入大量人员和时间的外业工作转变为只需一人即可操作的内业任务,极大缩减了工程中测量人员的投入,提高了测量复核工作的效率,加快了工期进度,如图10所示。
3.6.4 清障环保及作业进度监察
无人机获取的照片处理为三维点云之后,根据项目要求对数据进行后期点云分类处理,过滤掉不需要的物体,将植被、车辆和人造物体矢量化和提取。结合广州市对于建筑工程项目提出了环境管理方面6个100%的要求,可以根据航拍照片的可见光折射程度,反映出施工区域扬尘是否严重。日常可以根据定期的航摄图片对比,检查项目场地内裸土覆盖有无遗漏,除尘降尘设备布置是否覆盖场地全部区域,对项目环保工作的策划与实施提供参考,如图11所示。

图11 项目全景航摄图实时监察Fig.11 Project Panoramic Aerial Image Real-time Monitoring
对施工过程中出现多处违规堆弃的建筑材料,如“乱占”、“乱采”、“乱堆”、“乱建”等给项目造成重大安全隐患的问题及时发现并清理[11]。日常也可以根据定期的航摄图片对比,掌握项目阶段性工作进展,结合预定工期进行分析,为项目场地策划与施工安排提供更加高效、直观、全面的数据支持,如图12所示。

图12 标识现场“四乱”区域Fig.12 Identify the“Messy”Area of the Site
4 总结
4.1 总结
本次工程实践通过使用大疆御2 Pro 无人机摄影测量,提出一套以还原施工现场数字模型及三维模型为目标的流程方案,通过无人机航摄现场实际情况的照片,软件处理的成果包含工程的三维地理信息以及现场实况影像资料[12]。可以在工程规划、设计和审查阶段做现场勘查,利于全面了解施工地区及周边的环境,在施工期间,无人机可以针对性地对面积、土石方体积、植被覆盖度、工程外观等进行勘查、测量及绘制地形图,减轻人工劳动强度的同时缩短了时间成本。
4.2 展望
相较于传统测绘模式,无人机摄影测量技术为工程施工中的基础数据调查提供了全新的方式。我们在今后的工程中需要积极引进,广泛拓展应用领域,探索无人机摄影测量技术的实施和应用路线,在输出多种格式成果的基础上,配合多款软件(PhotoScan、3Dmax、Smart3D 等),可以用来生成实景三维模型[13],提供准确、可靠的信息,获取更加全面的地物纹理细节,便于更加准确地进行设计与施工,有效避免重建工作,缩短建设时间。