基于ROS的智能移动靶设计与实现
2021-10-19徐涛冯鹏程晁国胜
徐涛 冯鹏程 晁国胜
摘 要:针对目前警用或军用轻武器射击训练中缺少智能移动靶的现状,结合实战化需求确定载运平台、靶标和整体系统的技战术指标;基于机器人操作系统,以机械设计思路设计了移动靶的升降和起倒功能;以系统控制设计思路设计了远程控制和智能控制功能。通过基于光固化的3D打印进行模型制作,验证了设计可行性。为轻武器射击实战化训练装备的研发提供了新的思路和方法参考。
关键词:机器人操作系统;智能移动靶;3D打印;实战化训练
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2021)06-0001-05
Design and Implementation of Intelligent Moving Target Based on ROS
XU Tao1,FENG Pengcheng1,CHAO Guosheng2
(1.Logistics University of Peoples Armed Police Force,Tianjin 300309,China;
2.Luohe Branch Henan Corps of PAP,Luohe 462001,China)
Abstract:Aiming at the current situation of lack of intelligent moving targets in the shooting training of police or military light weapons at present,combined with the actual combat requirements,the technical and tactical indicators of the carrier platform,target and the overall system are determined. Based on the robot operating system,the lifting and falling functions of the moving target are designed according to the mechanical design idea. The functions of remote control and intelligent control are designed according to the system control design idea. The feasibility of the design is verified by the model making of 3D printing based on photocuring. It provides a new idea and method reference for the research and development of actual combat training equipments for light arms shooting.
Keywords:ROS;intelligent moving target;3D printing;actual combat training
0 引 言
智能化、网联化载运工具方兴未艾,在军事领域的应用也逐渐深入。在以重武器为主要作战装备的部队中,训练可以使用例如无人靶机、无人靶车和无人靶船等装备作为打击目标,实战能力得以大幅提高。但是以轻武器为主要作战装备的部队,在射击训练中缺少无人智能化射击靶。尤其是近年來,部队对于反恐和巷战训练需求增多,“绝对快、相对准”的射击理念逐渐深入,对仿人运动靶的需求增大。本题选择设计一款智能网联的实战化移动靶,将智能技术融入射击靶,使其能够模拟真人运动特点,有效锻炼射击人员的快速反应能力,提升实战化训练水平,提高部队战斗力。
1 移动靶战(技)指标需求
在军事领域,机动主要指兵力或武器装备转移至目标地域;对通用车辆,机动性主要指车辆在最小面积内转弯、转向和掉头的能力。本文借鉴军事领域机动性的主要影响因素,综合车辆的动力性、操作性和通过性指标,提出智能移动靶机动性能指标需求分析,主要包括最高速度、加速能力、转向能力和越障能力等性能指标。
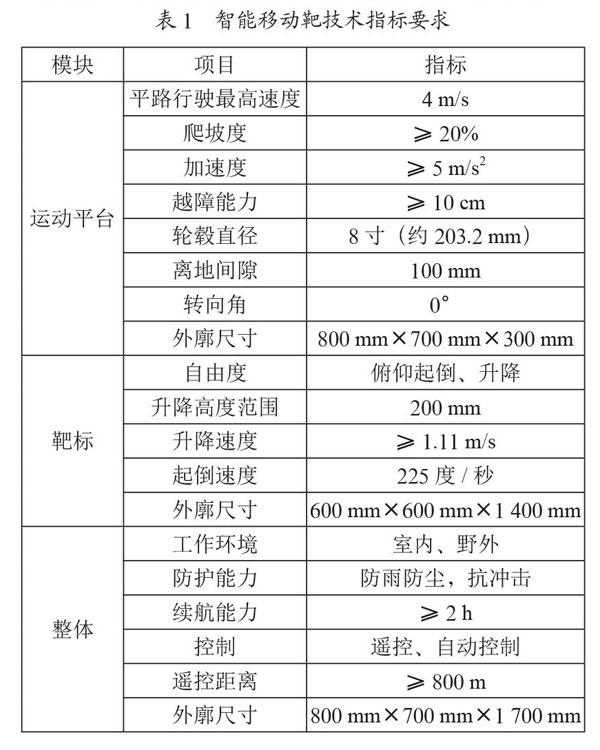
智能移动靶需要具有以下能力:(1)运动平台拥有良好的机动性能;(2)靶标能够起倒、升降;(3)具有遥控和一定的无人驾驶能力。智能移动靶指标需求汇总如表1所示。
2 移动靶车设计
2.1 机械系统设计
2.1.1 运动机构
移动、变速、转向功能为智能移动靶的运动功能,主要包括轮式、履带式、腿式。每种方式都有各自的特点,适合不同设备需求和应用场景。各个方式的优缺点如表2所示[1]。
虽然本课题是设计一款仿人运动的智能移动靶,但是由于腿式移动机构结构复杂,技术门槛高,成本较高,所以放弃腿式机构。又根据需求选择电力驱动,履带式结构耗能较高,电力续航时间短,所以最终选择技术条件成熟,运行稳定的轮式移动机构。为提升轮式运动机构的越障能力和机动性能,智能移动靶选择四轮差分驱动,每个轮均有驱动电机。为使其具有人体原地转向能力,选择差速转向,即转向角为0°。
运动机构是模仿人体行走或跑步的机构,是智能移动靶中控制运动的部分,包括底盘部分和运动控制箱部分。底盘部分主要功能是输出动力,驱动整个系统运动;运动控制箱部分功能主要是连接、支承和防护:连接底盘和上部升降起倒机构,支承整个系统并为其提供一定的防护,如图1所示。
2.1.2 起倒機构
升降、起倒为靶标机构的执行功能,为简化设计,本课题将升降功能整合到市场上现有比较成熟的起倒靶机上。起倒机构设计的主要在于传动,传动方式主要有螺旋传动、摩擦传动、带传动、链传动和齿轮传动等方式。各种传动方式的特点总结如表3所示。起倒机构所处空间较小,并且要求传动稳定,正反转向顺畅,因此选用齿轮式传动。
起倒机构是实现靶标(靶面+靶杆)俯仰起倒的机构。机械传动式起倒靶需要电机产生动力,传动部分传递或转化动力,起倒杆输出起倒转矩。起倒机构整体效果如图2所示。
2.1.3 升降机构
升降机构有剪式升降、链条式升降、丝杠式升降、钢丝绳式升降等四种[2],各种升降的优缺点对比如表4所示[3]。根据需求分析,靶标在约1 s内完成一个升降周期,即1 s内20 cm升降,对升降机构的速度要求较高,并且起倒靶空间有限,因此选用齿轮齿条式升降机构。
升降机构是通过链传动使靶面上下运动,达到模仿人体在运动过程中重心起伏目的的机构。升降功能的实现是在靶杆部分进行改造,将小型链轮和链条整合至靶面两侧的靶杆内,通过底部电机驱动链轮带动靶面升降运动。通过SolidWorks进行3D建模,升降机构整体概念图如图3所示。
2.1.4 智能移动靶整体效果
综上设计分析,智能移动靶整体效果如图4所示。需要注意的是此为初步设计方案,后续在控制部分设计、样车试制和功能测试过程中发现不合理之处需要随时进行调整。
2.2 ROS控制系统设计
机器人操作系统(Robot Operating System,ROS)是用于编写机器人软件程序的一种具有高度灵活性的软件架构。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递以及数据包管理。它也提供用于获取、编译、编写和跨计算机运行代码所需的工具和库函数,相当于一种“机器人框架”[4]。智能移动靶的操作系统安装在机载树莓派上,树莓派是一种使用ARM架构的Linux系统的卡片式电脑。选用STM32单片机作为驱动板驱动电机、雷达、遥控等功能模块。
2.2.1 远程控制设计
目前比较成熟的远程控制技术主要有2.4 GHz无线电波、LTE、无线射频、红外技术。2.4 GHz无线电波在遥控领域应用比较广泛,蓝牙、Wi-Fi均是基于2.4 GHz,只是协议不同。由于智能移动靶遥控距离不小于800米,响应速度要快,而且需要具有集群控制能力。根据综合对比分析,基于2.4 GHz的遥控技术可以不依赖网络且遥控距离较远,适合智能移动靶使用。基于2.4 GHz的航模遥控器由于其遥控距离较远,成本较低,并且技术比较成熟,市场反应较好。智能移动靶选用的遥控器和接收机分别为航模Micrzone MC6C型和MC7RB型。
Micrzone MC7RB接收机具有6通道PWM信号和SUBS信号,能满足军用智能移动靶的控制需要。对应遥控器通道如图5所示,A左右摇杆是1通道,上下方向是2通道;B摇杆上下方向是2通道,左右方向是4通道;C开关为5通道;D开关为6通道;其余按钮和微调开关暂时不做应用,留作后续功能开发。接收机通过杜邦线与树莓派预留拓展GPIO口连接,由树莓派接收并处理遥控信息。
2.2.2 SLAM智能驾驶
SLAM(Simultaneous Localization and Mapping)算法,即同时定位与地图构建,目前被广泛应用于机器人领域。SLAM是指机器人在未知的环境中通过自身所携带的内部传感器(编码器、IMU等)和外部传感器(激光传感器或者视觉传感器)来对自身进行定位,并在定位的基础上利用外部传感器获取的环境信息增量式的构建环境地图,实现机器人的自主定位和导航[5],如图6所示。
在建成的地图上给定运动路线,智能移动靶运动过程中,通过里程计信息结合激光传感器获取的位姿信息确定当前位置与目标位置进行对比,若未到达目标位置则通过move_base进行路径规划,根据规划得到的轨迹给智能移动靶发送控制指令,向目标位置前进。若当前位置与目标位置相匹配则停止。SLAM无人驾驶原理如图7所示。
2.2.3 集群控制仿真
集群控制的设计主要是为了实现进行多机协同运动,可以模拟战场环境中群体性目标的动作和反应,能够为小组协同作战提供训练条件,更加具有实战意义。ROS系统设计的灵魂在于其分布式计算,它允许实施分配计算量以最大化地利用系统资源。通过配置驱动节点和分布式网络,即可实现多台智能移动靶的集群控制。但是出于成本和技术层面考虑,在集群控制多机协同详细设计时仅进行电脑模拟仿真。军用智能移动靶多机协同框架如图8所示。需要一个机器上运行master;所有节点即智能移动靶都必须通过配置ROS_MASTER_URI连接到同一个master;任意两台机器间任意两端口都必须要有完整的、双向连接的网络;每台机器都必须向其他机器广播其能够解析的名字。
多机协同中,通信硬件系统要支持每个节点的组网互联,每台智能移动靶采用自带的无线AP(Access Point)进行互联互通;对于软件系统的结构,每个智能移动靶运行的节点采用ROS1中心点的通信方式,即图8中ROS Master是整个ROS节点的中心,组成一个星状网络结构,这个ROS Master是和其他节点的通信桥梁。
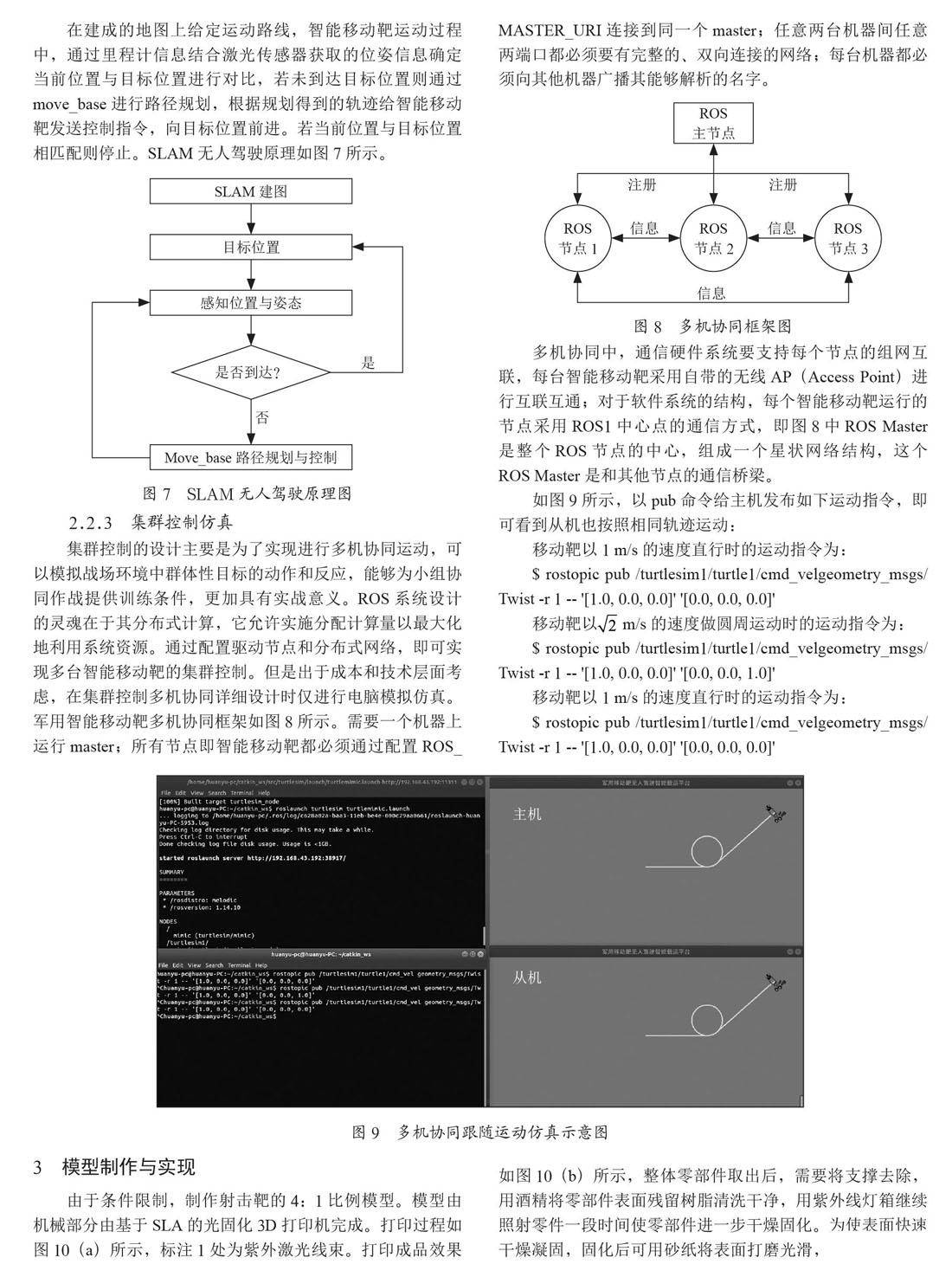
如图9所示,以pub命令给主机发布如下运动指令,即可看到从机也按照相同轨迹运动:
移动靶以1 m/s的速度直行时的运动指令为:
$ rostopic pub /turtlesim1/turtle1/cmd_velgeometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
移動靶以 m/s的速度做圆周运动时的运动指令为:
$ rostopic pub /turtlesim1/turtle1/cmd_velgeometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 1.0]'
移动靶以1 m/s的速度直行时的运动指令为:
$ rostopic pub /turtlesim1/turtle1/cmd_velgeometry_msgs/Twist -r 1 -- '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]'
3 模型制作与实现
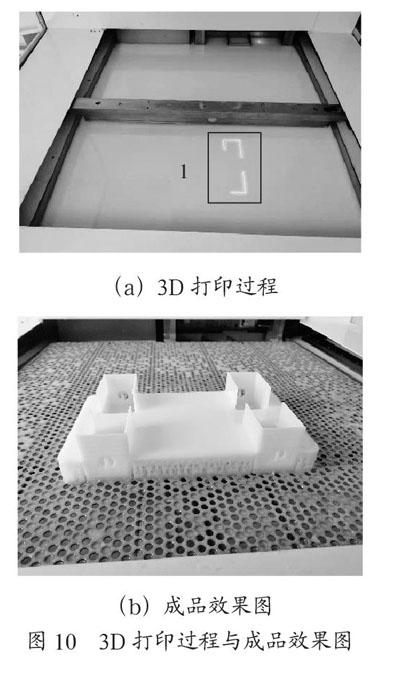
由于条件限制,制作射击靶的4:1比例模型。模型由机械部分由基于SLA的光固化3D打印机完成。打印过程如图10(a)所示,标注1处为紫外激光线束。打印成品效果如图10(b)所示,整体零部件取出后,需要将支撑去除,用酒精将零部件表面残留树脂清洗干净,用紫外线灯箱继续照射零件一段时间使零部件进一步干燥固化。为使表面快速干燥凝固,固化后可用砂纸将表面打磨光滑,砂纸要求600目以上。打磨后可根据需求对表面颜色进行喷涂,军用智能移动靶样机选涂荒漠迷彩喷漆。
4 结 论
本文针对军警轻武器射击训练中缺少智能移动靶的现实情况,以实战化战技指标为依据,基于机器人操作系统,从运动机构、起倒机构和升降机构三个方面设计了智能移动靶的机械系统,从远程控制、SLAM自动驾驶和集群控制仿真三个方面设计了智能移动靶的控制系统,最后通过3D打印制作比例模型验证了设计的可行性。将机器人操作系统融入射击靶,使其能够模拟实战环境中真人运动特点,有效锻炼射击人员的快速反应能力,提升实战化训练水平。
参考文献:
[1] 董莹.六轮足复合式移动机器人的设计与研究 [D].北京:北京交通大学,2017.
[2] 杜干.升降平台升降机构研究现状分析 [J].机械工程与自动化,2013(2):205-207.
[3] 张亚军.可如厕智能轮椅担架车设计与研究 [D].秦皇岛:燕山大学,2018.
[4] 张鹏.基于ROS的全向移动机器人系统设计与实现 [D].合肥:中国科学技术大学,2017.
[5] 陈卫东,张飞.移动机器人的同步自定位与地图创建研究进展 [J].控制理论与应用,2005(3):455-460.
作者简介:徐涛(1994.02—),男,汉族,天津人,硕士研究生在读,研究方向:载运工具运用工程。
