基于树莓派的实时视频监控机器人设计
2021-10-16李庆园文静
李庆园 文静


摘要:该文基于树莓派设计了一款实时视频监控机器人。该机器人的设计包括主控模块、驱动模块、避障模块、实时监控模块和目标检测模块,实现了实时视频监控、自动循迹避障、Wi-Fi控制行驶、车牌检测等功能。测试结果表明该机器人具有较好的遥控和避障性能,目标检测的准确率较高,能较好地实现人机交互,且整个操作简单易控。
关键词:树莓派;实时监控;自动避障;目标检测
中图分类号:TP242.6 文献标识码:A 文章编号:2096-4706(2021)07-0130-04
Design of Real-time Video Surveillance Robot Based on Raspberry Pi
LI Qingyuan,CAI Wenjing
(School of Electronic and Information,Zhongyuan University of Technology,Zhengzhou 450007,China)
Abstract:In this paper,a real-time video surveillance robot is designed based on Raspberry Pi. The design of the robot includes the main control module,the driving module,the obstacle avoidance module,the real-time monitoring module and the target detection module,which realizes the real-time video monitoring,automatic tracking obstacle avoidance,Wi-Fi control driving,license plate detection and other functions. The test results show that the robot has good performance on remote control and obstacle avoidance,and the accuracy of target detection is high. It can better achieve human-computer interaction,and the whole operation is simple and easy to control.
Keywords:Raspberry Pi;real-time monitoring;automatic obstacle avoidance;target detection
收稿日期:2021-03-11
基金项目:河南省高校重点科研项目(19A 510005、21A510016、21A520052);校内重大项目成果培育计划(K2020ZDPY02)
0 引 言
随着科技的进步,人工智能越来越受到人们的关注,各种智能化设备逐渐替代人工操作。机器人是由信息采集、数据分析、命令执行等部分构成的综合系统[1]。机器人技术的不斷发展使得其使用范围逐步扩大,不仅在工业、农业、服务业等行业中应用广泛,同时,在救灾抢险、工程勘探、军事排查等领域也发挥着极其重要的作用[2]。
目前,通过Arduino和树莓派(Raspberry Pi,RPi)等开源硬件和传感器,即可对机器人进行快速开发[3]。由于Arduino和RPi平台的开源性,可以在该平台上实现软件和硬件的开发。由于Arduino和RPi丰富的硬件接口为二次开发提供了便利条件,可以通过USB接口将Arduino本身自带的Bootloader程序下载至开发板,该功能使修改、开发程序的操作更加容易。RPi可视为一个微型计算机,其具有更为复杂的功能,例如,网络通信。RPi的处理器是ARM架构,可直接在本地编程、编译、运行程序,若要在原有程序中添加或删除某项功能,或从当前任务切换到另一个新任务时不需要重新烧写程序。RPi不仅可以通过输入输出来控制外部设备,而且还可以通过Wi-Fi实现远程控制。树莓派采用C语言和Python等多种语言编写,相较于其他语言,Python和C语言的使用更加广泛,受益人群更多。
本文设计了一款由上位机控制的实时视频监控智能机器人,能够实现实时视频监控、自动循迹避障、Wi-Fi控制行驶、车牌检测等功能,最后将实时监控采集到的视频图像传输到终端设备并进行感兴趣区域的检测。
1 项目设计方案
基于RPi的实时视频监控机器人由主控模块、驱动模块、避障模块、实时监控模块、检测模块组成。该项目中RPi控制电机驱动模块,使机器人能够实现全方位移动。超声波测距是自动避障的基础。Wi-Fi控制是机器人与上位机之间的纽带,用来传递指令信息。最终将采集到的视频数据通过虚拟网络控制台(Virtual Network Console,VNC)传送回终端设备,并对视频图像进行检测获取我们需要的感兴趣区域。
1.1 主控模块
主控模块是实时视频监控机器人的核心,其作用是协调控制机器人所有功能的实现和运行[4]。本设计选用RPi 3B+作为控制板。RPi 3B+通过TB6612FNG芯片控制驱动模块,使得机器人能够实现全方向移动。RPi 3B+包含64位处理器和1 GB内存,其中处理器的主频为1.2 GHz。该主板内置的Wi-Fi模块是它最显著的特点,可以更加方便地进行联网操作,从而使得机器人提高了监控路线无线传输至智能手机或显示器等终端的效率,并且带有视频、音频等一系列的输入输出接口,性能优越,成本低,安装便利。
1.2 驱动模块
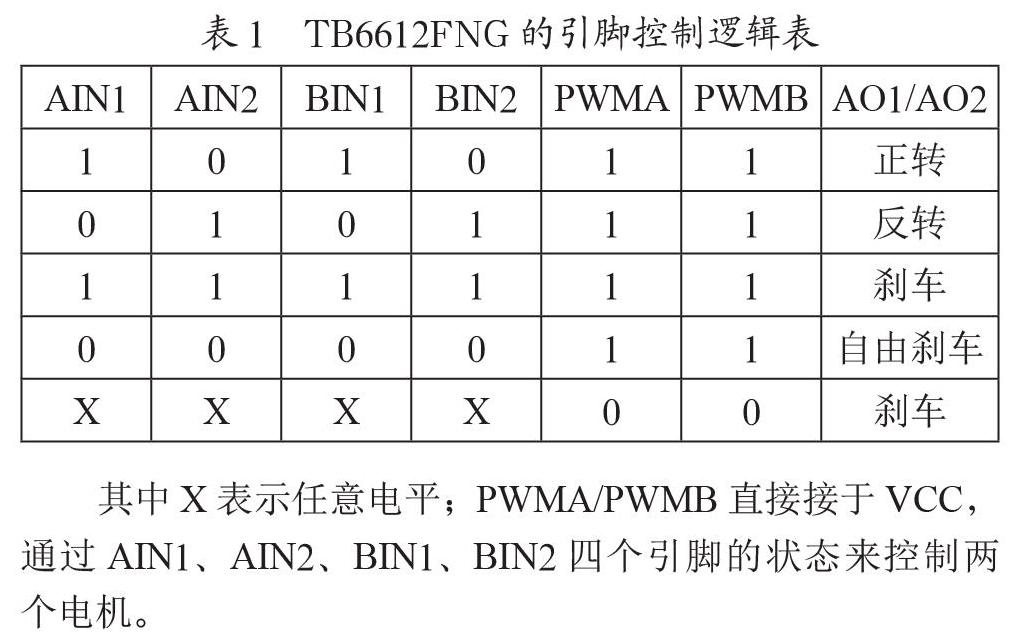
机器人在移动过程中受树莓派通用型输入输出引脚的限制,使得车轮的移动需要借助于特定的驱动模块。该机器人的设计选用的是TB6612FNG驱动芯片。TB6612FNG是一款由直流电机驱动的器件,其驱动桥为MOSFET-H结构,能够承受大电流的通过并且有双通道的输出,其中每个通道输出的连续驱动电流最高为1 A,且能够同时驱动两个电机。TB6612FNG驱动芯片可以控制四种不同的电机模式,即正转、反转、制动、停止,并且脉冲宽度调制(Pulse Width Modulation,PWM)支持的频率高达100 kHz。其输出的负载能力是L293D的两倍,与L298N相比,它不需要外围续流二极管电路,热耗性较低,因此该驱动芯片不需要外加散热器件,而且它的外围电路非常简单,可以直接用于电机的驱动,利于减小模块尺寸。TB6612FNG的引脚控制逻辑表如表1所示。
其中X表示任意电平;PWMA/PWMB直接接于VCC,通过AIN1、AIN2、BIN1、BIN2四个引脚的状态来控制两个电机。
1.3 避障模块
机器人在执行现实任务的过程中,由于其周围环境的复杂性,障碍物的存在影响机器人的移动。在本设计中选择HC-SR04超声波测距模块实现测距。HC-SR04模块通过不断地发送超声波,遇到遮挡物时被接收,根据发送和接收超声波的时间差来计算遮挡物到机器人的距离,进而实现自主避障功能[5]。
HC-SR04超声波测距模块工作时序图如图1所示。HC-SR04持续输入10 μs的高电平信号才能触发工作状态,当测距模块处于工作状态时,模块内部信号开始发出,该信号由8个循环的方波组成。然后模块开始自动检测发出信号的返回情况并判断时间差,当检测到返回信号时,模块内部输出回响信号,该信号中高电平的持续时间即为超声波发出到接收所用的时间。
1.4 实时监控模块
实时视频监控机器人最终实现对指定场合进行实时的巡视监控功能,并利用Wi-Fi模块将监控视频传输到显示器、手机、电脑等终端设备,达到实时监控的效果。本设计的主控模块RPi 3B+内置无线Wi-Fi模块,不仅可以实现快速联网,而且还可以快速地将监控路线无线发送给显示器、手机、电脑等终端设备[6]。
1.5 检测模块
测量目标运动状态的前提是准确检测出视频中的目标。近年来,深度学习的发展为目标检测和分类奠定了理论基础,其中神经网络技术的应用更为广泛[7]。本设计中选择SSD网络作为检测车牌的网络结构。
对交通数据集BIT-Vehicle中9 850张分辨率为1 920× 1 080的图像进行分析,根据SSD感受野的大小对交通监控视频中的车牌尺寸进行统计分类,交通监控视频中的车牌尺寸都不超过260×260的分辨率,即使图像的分辨率达到4 K,车牌区域的大小仍不超过conv10_2的感受野大小,即485×485。因此根据车牌大小的统计分类,通过删除conv11_2层来优化SSD网络结构,设计了最适合交通视频中车辆车牌检测的网络结构,并命名为LPD-SSD。该网络不仅可以提高模型训练精准度和检测速度,而且还可以减少模型数据量,从而提高网络效率。网络结构的训练集和测试集由26 400幅图像构成:从三个车辆数据集中随机选择的7 000幅图像、从中原工学院校园安全监控系统中提取的1 000幅图
像、Nikon d3200 SLR拍摄的800幅高分辨图像以及以上8 800幅图像随机裁剪、缩放后的变形。以上数据集中的图像将分成两部分来使用:一半图像用来训练模型,另一半图像作为训练过程中的测试集。经过23 000步的训练,得到一个基于SSD的模型和一个基于LPD-SSD的模型,两个模型的平均检测精度几乎相同,然而后者的损失函数比前者低0.2。然后选择不在训练集中使用的600张图像作为验证集,进一步验证这两个模型的检测精度,基于LPD-SSD的模型比基于SSD的模型的检测精度低0.2%,然而二者在相同配置的计算机上检测时,LPD-SSD的检测速度提高8%,二者的检测精度保持不变,因此,选择LPD-SSD用来检测车牌。
2 方案测试
为验证本设计方案的可行性,对机器人进行功能测试。首先将机器人放置于有障碍物的室内环境中测试其自动避障功能。当检测到机器人与障碍物之间的距离小于设定的避障距离时,机器人将自动躲避障碍物,反之亦然。即使机器人所处环境中存在多个障碍物也能实现自动避障功能,如图2所示。
其次利用白底黑线的巡线图进行机器人的循迹功能测试。将机器人放置于巡线图区域内,循迹模块正中央对齐黑线并开启循迹模式。机器人循迹功能测试如图3所示。
最后,对机器人的目标检测功能进行测试。在终端设备接收到传送回来的视频图像后,将视频图像传输给目标检测模块。实时传送回PC端的视频图像如图4(a)、(c)所示,经LPD-SSD模型检测后能够准确检测到视频图像中的车牌区域,如图4(b)、(d)所示,黄色方框区域即为感兴趣区域。
功能测试表明,实时视频监控机器人不仅能够实现自动循迹避障的功能,而且还能够通过上位机控制机器人的移动方向,对实时场景进行拍摄传输,实现车牌目标区域的检测。
3 结 论
测试表明该设计控制灵活、可靠、精度高,并且能够将摄像头采集到的视频传输到终端设备,通过目标检测模块检测到感兴趣区域。但机器人在室外环境中工作时,由于自然光的变化,外部光源所产生的阴影会影响机器人的自动循迹避障功能,引起错误预警。总之,本设计旨在保证较好的自主避障功能的前提下可以有效地实现视频传输及目标检测,为消防安全、道路监控提供了设计思路。
参考文献:
[1] 靳宇星.轮式移动机器人滑模轨迹跟踪控制 [J].科技与创新,2021(2):59-60+65.
[2] 陶永,王田苗,刘辉,等.智能机器人研究现状及发展趋势的思考与建议 [J].高技术通讯,2019,29(2):149-163.
[3] 吴波涛,孔金平,王湘.基于Arduino和树莓派的智能小车的设计与实现 [J].电子设计工程,2017,25(15):58-61.
[4] 刘鹏程.基于树莓派的行人检测小车设计 [J].软件导刊,2018,17(2):114-116.
[5] 吴瑞锐,朱晓峰,宋宗峰.基于HC-SR04多超声波避障技术 [J].智库时代,2020(3):281-283.
[6] 杨森,张玮.基于WIFI的視频监控智能小车机器人 [J].数字技术与应用,2016(4):81-82.
[7] 李梦龙.基于双目立体视觉的车辆速度轨迹智能测量 [D].郑州:中原工学院,2019.
作者简介:李庆园(1996—),女,汉族,河南新乡人,硕士研究生在读,研究方向:计算机视觉;蔡文静(1992—),女,汉族,河南漯河人,实验师,硕士研究生,研究方向:计算机视觉。
